深入理解SLAM技术概述-程序员宅基地
技术标签: 自动驾驶 人工智能 # 射影几何和slam基础
一、说明
SLAM(同步定位和地图绘制)是一种用于自动驾驶车辆的方法,可让您构建地图并同时在该地图中定位您的车辆。SLAM 算法允许车辆绘制未知环境的地图。工程师利用地图信息来执行路径规划和避障等任务。
二、为什么 SLAM 很重要
SLAM多年来一直是技术研究的课题。但随着计算机处理速度的大幅提高以及相机和激光测距仪等低成本传感器的出现,SLAM 现在已在越来越多的领域得到实际应用。为了理解 SLAM 的重要性,让我们看一下它的一些优点和应用示例。
2.1 SLAM 示例
考虑家用机器人真空吸尘器。如果没有 SLAM,它只会在房间内随机移动,可能无法清洁整个地板表面。此外,这种方法使用过多的电量,因此电池会更快耗尽。另一方面,具有 SLAM 的机器人可以使用车轮转数等信息以及来自摄像机和其他图像传感器的数据来确定所需的移动量。这称为本地化。机器人还可以同时使用摄像头和其他传感器来创建周围障碍物的地图,避免对同一区域进行两次清洁。这称为映射。
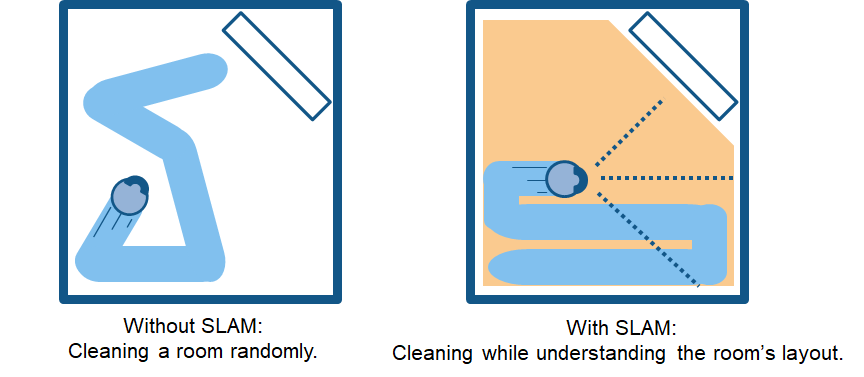
SLAM 对清洁机器人的好处
SLAM 在许多其他应用中也很有用,例如导航移动机器人车队在仓库中安排货架、将自动驾驶汽车停放在空位上,或者通过在未知环境中导航无人机来递送包裹。MATLAB 和 Simulink 提供SLAM 算法、函数和分析工具来开发各种应用程序。您可以实现同步定位和建图以及其他任务,例如传感器融合、对象跟踪、路径规划和路径跟踪。
三、SLAM 的工作原理
从广义上讲,有两种类型的技术组件用于实现 SLAM。第一类是传感器信号处理,包括前端处理,这很大程度上取决于所使用的传感器。第二种类型是位姿图优化,包括与传感器无关的后端处理。

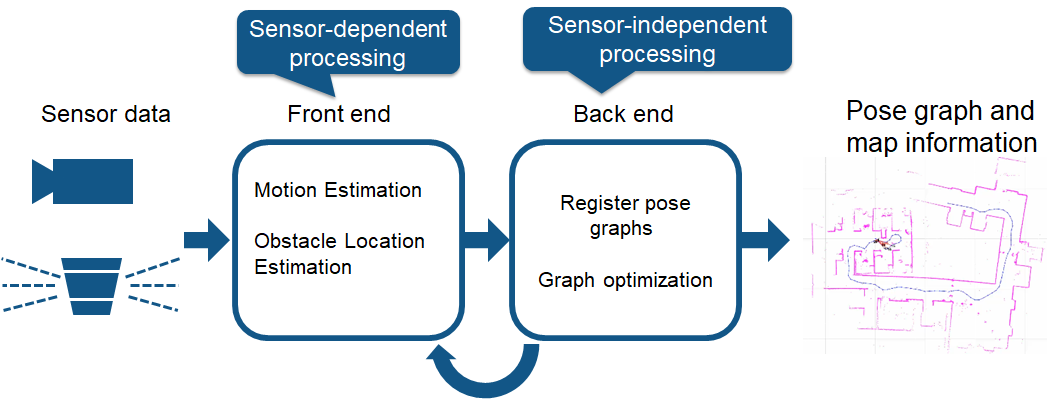
SLAM处理流程
要了解有关前端处理组件的更多信息,让我们看一下视觉 SLAM 和激光雷达 SLAM——两种不同的 SLAM 方法。
3.1 视觉SLAM
顾名思义,视觉 SLAM(或 vSLAM)使用从摄像机和其他图像传感器获取的图像。视觉SLAM可以使用简单相机(广角、鱼眼和球面相机)、复眼相机(立体和多相机)和RGB-D相机(深度和ToF相机)。
视觉 SLAM 可以通过相对便宜的相机以低成本实现。此外,由于相机提供大量信息,因此它们可用于检测地标(先前测量的位置)。地标检测还可以与基于图的优化相结合,实现 SLAM 实施的灵活性。
单目 SLAM 是指 vSLAM 使用单个摄像头作为唯一传感器,这使得定义深度变得具有挑战性。这可以通过检测 AR 标记、棋盘或图像中的其他已知物体进行定位来解决,或者将摄像头信息与惯性测量单元 (IMU) 等其他传感器融合,后者可以测量速度和方向等物理量。与vSLAM相关的技术包括运动结构(SfM)、视觉里程计和束调整。
视觉SLAM算法 大致可以分为两类。稀疏方法匹配图像的特征点,使用PTAM、ORB-SLAM等算法。密集方法利用图像的整体亮度,并使用 DTAM、LSD-SLAM、DSO 和 SVO 等算法。
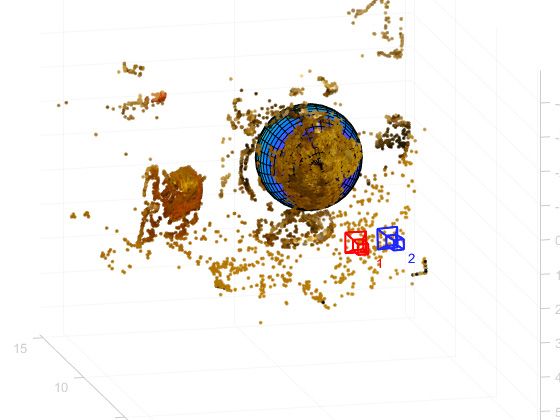
结构源于运动。
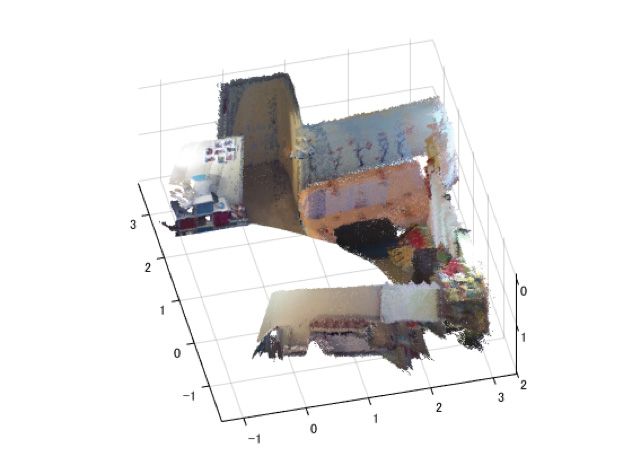
RGB-D SLAM 的点云配准
3.2 激光雷达SLAM
光探测和测距(激光雷达)是一种主要使用激光传感器(或距离传感器)的方法。
与摄像头、ToF 和其他传感器相比,激光的精确度明显更高,适用于自动驾驶汽车和无人机等高速移动车辆的应用。激光传感器的输出值通常是 2D (x, y) 或 3D (x, y, z) 点云数据。激光传感器点云提供高精度距离测量,对于 SLAM 地图构建非常有效。通常,通过匹配点云来顺序估计运动。计算出的移动(行驶距离)用于定位车辆。对于激光雷达点云匹配,使用迭代最近点(ICP)和正态分布变换(NDT)算法等配准算法。2D 或 3D 点云图可以表示为网格图或体素图。
另一方面,点云在密度方面不如图像详细,并且并不总是提供足够的特征用于匹配。例如,在障碍物很少的地方,很难对齐点云,这可能会导致丢失车辆位置。此外,点云匹配通常需要较高的处理能力,因此需要优化流程以提高速度。由于这些挑战,自动驾驶车辆的定位可能需要融合其他测量结果,例如车轮里程计、全球导航卫星系统 (GNSS) 和 IMU 数据。对于仓库机器人等应用, 通常使用 2D 激光雷达 SLAM ,而使用 3D 激光雷达点云的 SLAM 可用于无人机和自动驾驶。
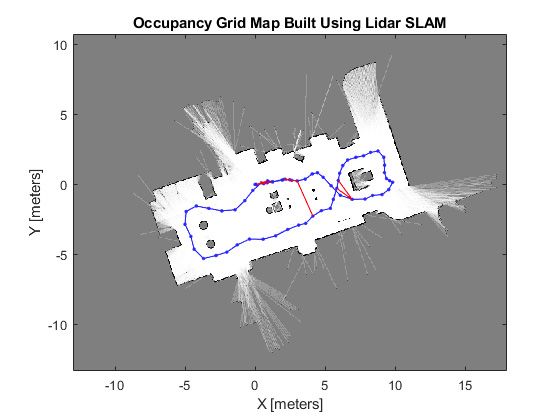
SLAM 与 2D LiDAR
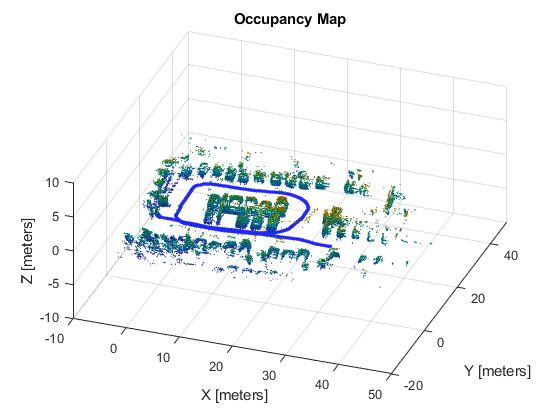
SLAM 与 3D LiDAR
四、SLAM 的常见挑战
尽管 SLAM 用于一些实际应用,但一些技术挑战阻碍了更通用的采用。每个人都有一个可以帮助克服障碍的对策。
4.1. 定位误差累积,导致与实际值存在较大偏差
SLAM 估计顺序运动,其中包含一定的误差幅度。误差随着时间的推移而累积,导致与实际值的显着偏差。它还可能导致地图数据崩溃或扭曲,使后续搜索变得困难。我们以绕方形通道行驶为例。随着误差的累积,机器人的起点和终点不再匹配。这称为循环闭合问题。像这样的姿势估计错误是不可避免的。检测闭环并确定如何纠正或消除累积的错误非常重要。
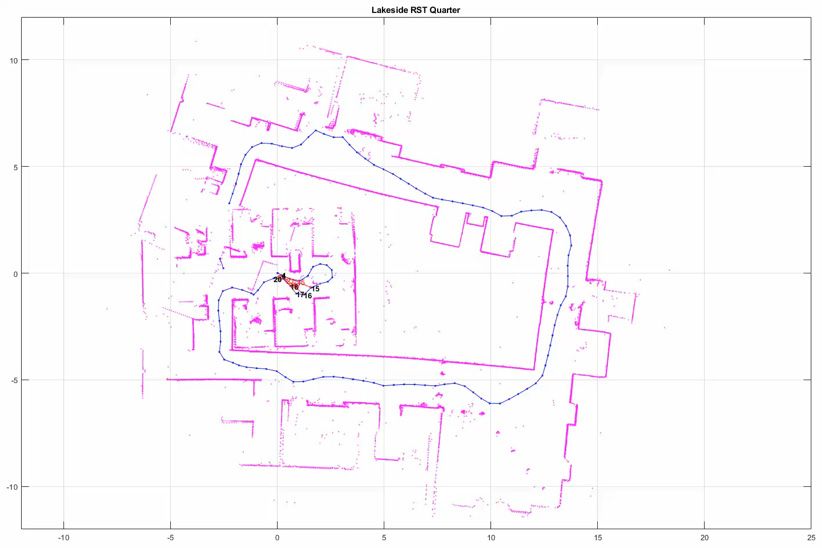
构建位姿图并最小化错误的示例。
一种对策是记住以前访问过的地方的一些特征作为地标,并最大限度地减少定位误差。构建姿势图是为了帮助纠正错误。通过将误差最小化作为优化问题来解决,可以生成更准确的地图数据。这种优化在视觉SLAM中称为捆绑调整。
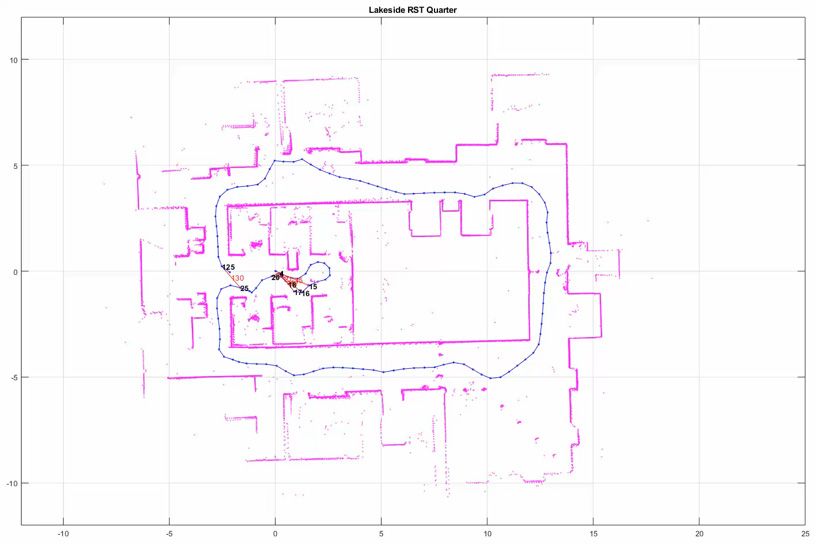
构建位姿图并最小化错误的示例
4.2. 定位失败,地图位置丢失
图像和点云映射没有考虑机器人运动的特征。在某些情况下,这种方法可能会生成不连续的位置估计。例如,计算结果显示,以 1 m/s 速度移动的机器人突然向前跳跃了 10 米。可以通过使用恢复算法或将运动模型与多个传感器融合以根据传感器数据进行计算来防止这种定位失败。
使用具有传感器融合的运动模型的方法有多种。一种常见的方法是使用卡尔曼滤波进行定位。由于大多数差动驱动机器人和四轮车辆通常使用非线性运动模型,因此经常使用扩展卡尔曼滤波器和粒子滤波器(蒙特卡罗定位)。在某些情况下,还可以使用更灵活的贝叶斯滤波器,例如无迹卡尔曼滤波器。一些常用的传感器是惯性测量设备,例如 IMU、姿态和航向参考系统或AHRS、惯性导航系统或 INS、加速度计传感器、陀螺仪传感器和磁传感器。安装在车辆上的车轮编码器通常用于里程计。
当定位失败时,恢复的对策是记住以前访问过的地方的地标作为关键帧。在搜索地标时,会以高速扫描的方式应用特征提取过程。一些基于图像特征的方法包括特征袋(BoF)和视觉词袋(BoVW)。最近,深度学习被用于比较特征的距离。
4.3.图像处理、点云处理和优化的计算成本较高
在车辆硬件上实施 SLAM 时,计算成本是一个问题。计算通常在处理能力有限的紧凑且低能耗的嵌入式微处理器上执行。为了实现精确定位,必须高频度地执行图像处理和点云匹配。另外,闭环等优化计算属于高计算过程。挑战在于如何在嵌入式微型计算机上执行这种计算成本高昂的处理。
一种对策是并行运行不同的进程。特征提取等过程是匹配过程的预处理,比较适合并行化。使用多核 CPU 进行处理、单指令多数据 (SIMD) 计算和嵌入式 GPU 在某些情况下可以进一步提高速度。此外,由于位姿图优化可以在相对较长的周期内执行,因此降低其优先级并定期执行此过程也可以提高性能。
五、SLAM的理论基础
SLAM技术是需要一些抽象的数学,虽有一些难度,但还没到了“坚不可摧”的地步。这一章我们专门梳理一下,到底需要哪些数学知识和数学概念,这些知识用到哪些恰当的地方,也就是这些数学概念的物理环境是啥。有了整体概念,我们将一个一个地将它们向钉子一样拔除。
上过大学的同学,总以为你的高等教育把数学囊括了,高数、概率、线代学一下,就可以包打天下,这种想法是不对的,也是大多数人的误区。本人在收集数学书籍至少两千五百本,每一本都比高数难,比高数抽象。然而这些书如何读懂?基础是《泛函分析》,当然就我本身的知识结构,我认为《数理方程》也是一门决定思维框架课程,其次还有《矢量场论》也构成一个基本概念。读者可能没有我这样好的数学功底,但不要泄气,我要用最简单的逻辑去解释深奥抽象的数学,让你完全明白其中的道理,并与生活常识对应起来。
以下列出,我们将从哪些知识说起,我所列的书籍自己已经涉略,但来不及写成文字,未来将逐步专题讨论,但是时间可能漫长。有兴趣的朋友也可以向我推荐相关题目,让我们群体讨论,将知识学扎实。
1 《高等几何》
这本书里讲的是,射影几何,仿射几何,齐次坐标等等;有志的同学,不妨啃啃这本书。其实,你只要学习一半,也就够你开发SLAM了。
2 《刚体运动》
这是一篇我写的讲义,其目的是将物体运动中,从三角函数的思维,切换到群论的思维。
3 《群论》或《伽罗华群》
解决问题不仅仅是个计算,群结构将大量的运算处理的简捷、明快、干净,真是一门上好的理论。
4 《李群和李代数》
将连续流形当作一个变换群,进而解决刚体在三维空间连续运动的轨迹,和抽样。
5 《卡尔曼滤波》
SLAM机器人的轨迹,计算的预测轨迹存在区别,用卡尔曼滤波去优化是合理选择。
6 《数字图像处理--特征点提取匹配》
双目镜头需要通过特征点匹配,以及三角测量法完成定位。
好了,暂时列出提纲,日后一步一步补全这些知识。
智能推荐
前端开发之vue-grid-layout的使用和实例-程序员宅基地
文章浏览阅读1.1w次,点赞7次,收藏34次。vue-grid-layout的使用、实例、遇到的问题和解决方案_vue-grid-layout
Power Apps-上传附件控件_powerapps点击按钮上传附件-程序员宅基地
文章浏览阅读218次。然后连接一个数据源,就会在下面自动产生一个添加附件的组件。把这个控件复制粘贴到页面里,就可以单独使用来上传了。插入一个“编辑”窗体。_powerapps点击按钮上传附件
C++ 面向对象(Object-Oriented)的特征 & 构造函数& 析构函数_"object(cnofd[\"ofdrender\"])十条"-程序员宅基地
文章浏览阅读264次。(1) Abstraction (抽象)(2) Polymorphism (多态)(3) Inheritance (继承)(4) Encapsulation (封装)_"object(cnofd[\"ofdrender\"])十条"
修改node_modules源码,并保存,使用patch-package打补丁,git提交代码后,所有人可以用到修改后的_修改 node_modules-程序员宅基地
文章浏览阅读133次。删除node_modules,重新npm install看是否成功。在 package.json 文件中的 scripts 中加入。修改你的第三方库的bug等。然后目录会多出一个目录文件。_修改 node_modules
【】kali--password:su的 Authentication failure问题,&sudo passwd root输入密码时Sorry, try again._password: su: authentication failure-程序员宅基地
文章浏览阅读883次。【代码】【】kali--password:su的 Authentication failure问题,&sudo passwd root输入密码时Sorry, try again._password: su: authentication failure
整理5个优秀的微信小程序开源项目_微信小程序开源模板-程序员宅基地
文章浏览阅读1w次,点赞13次,收藏97次。整理5个优秀的微信小程序开源项目。收集了微信小程序开发过程中会使用到的资料、问题以及第三方组件库。_微信小程序开源模板
随便推点
Centos7最简搭建NFS服务器_centos7 搭建nfs server-程序员宅基地
文章浏览阅读128次。Centos7最简搭建NFS服务器_centos7 搭建nfs server
Springboot整合Mybatis-Plus使用总结(mybatis 坑补充)_mybaitis-plus ruledataobjectattributemapper' and '-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏3次。前言mybatis在持久层框架中还是比较火的,一般项目都是基于ssm。虽然mybatis可以直接在xml中通过SQL语句操作数据库,很是灵活。但正其操作都要通过SQL语句进行,就必须写大量的xml文件,很是麻烦。mybatis-plus就很好的解决了这个问题。..._mybaitis-plus ruledataobjectattributemapper' and 'com.picc.rule.management.d
EECE 1080C / Programming for ECESummer 2022 Laboratory 4: Global Functions Practice_eece1080c-程序员宅基地
文章浏览阅读325次。EECE 1080C / Programming for ECESummer 2022Laboratory 4: Global Functions PracticePlagiarism will not be tolerated:Topics covered:function creation and call statements (emphasis on global functions)Objective:To practice program development b_eece1080c
洛谷p4777 【模板】扩展中国剩余定理-程序员宅基地
文章浏览阅读53次。被同机房早就1年前就学过的东西我现在才学,wtcl。设要求的数为\(x\)。设当前处理到第\(k\)个同余式,设\(M = LCM ^ {k - 1} _ {i - 1}\) ,前\(k - 1\)个的通解就是\(x + i * M\)。那么其实第\(k\)个来说,其实就是求一个\(y\)使得\(x + y * M ≡ a_k(mod b_k)\)转化一下就是\(y * M ...
android 退出应用没有走ondestory方法,[Android基础论]为何Activity退出之后,系统没有调用onDestroy方法?...-程序员宅基地
文章浏览阅读1.3k次。首先,问题是如何出现的?晚上复查代码,发现一个activity没有调用自己的ondestroy方法我表示非常的费解,于是我检查了下代码。发现再finish代码之后接了如下代码finish();System.exit(0);//这就是罪魁祸首为什么这样写会出现问题System.exit(0);////看一下函数的原型public static void exit (int code)//Added ..._android 手动杀死app,activity不执行ondestroy
SylixOS快问快答_select函数 导致堆栈溢出 sylixos-程序员宅基地
文章浏览阅读894次。Q: SylixOS 版权是什么形式, 是否分为<开发版税>和<运行时版税>.A: SylixOS 是开源并免费的操作系统, 支持 BSD/GPL 协议(GPL 版本暂未确定). 没有任何的运行时版税. 您可以用她来做任何 您喜欢做的项目. 也可以修改 SylixOS 的源代码, 不需要支付任何费用. 当然笔者希望您可以将使用 SylixOS 开发的项目 (不需要开源)或对 SylixOS 源码的修改及时告知笔者.需要指出: SylixOS 本身仅是笔者用来提升自己水平而开发的_select函数 导致堆栈溢出 sylixos