【GitHub项目推荐--机器人OS开源】【转载】_机器人开源平台-程序员宅基地
技术标签: github 机器人 开源 GitHub项目推荐
ArduPilot 机器人OS
目前全球用户最多、最先进、功能齐全且可靠的机器人OS
机器车无人驾驶仪软件 ArduPilot
github地址
https://github.com/ArduPilot/ardupilot
官方网站 https://ardupilot.org/
有硬件配件名单、软件、固件 和 驱动等
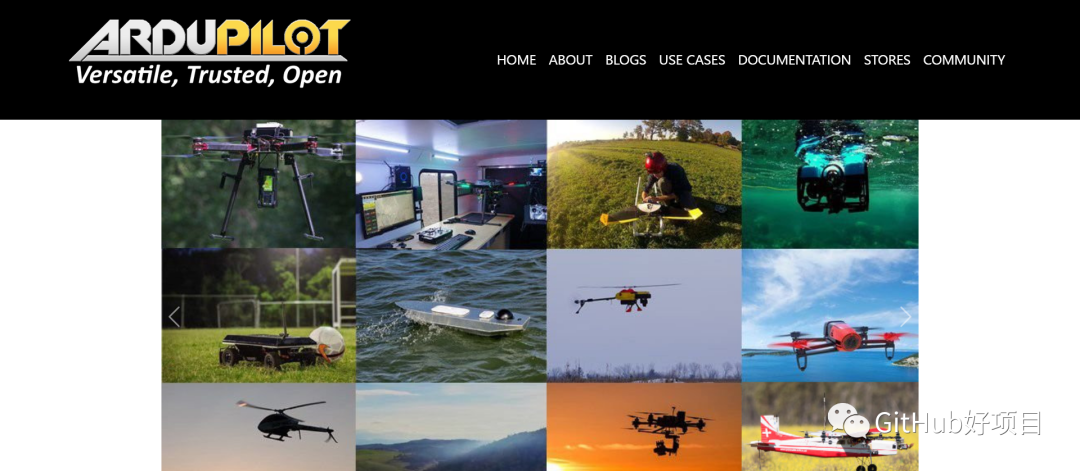
ArduPilot 是目前最先进、功能齐全且可靠的开源自动驾驶仪软件。自 2010 年以来,它一直由专业工程师、计算机科学家和社区贡献者组成的多元化团队开发。我们的自动驾驶仪软件能够控制几乎所有可以想象到的车辆系统,从传统飞机、四轴飞机、多旋翼和直升机到漫游车、船只、平衡机器人,甚至潜艇。它正在不断扩展,以为新兴车辆类型提供支持。

ArduPilot 是一个基于 Arduino 平台的无人驾驶技术开发社区。该社区致力于为无人机、无人驾驶车辆和其他自主控制系统提供开源的硬件、操作系统和软件解决方案。
以下是关于 ArduPilot 开发社区的一些介绍:
1. 成立背景:ArduPilot 成立于 2008 年,由一群无人机和无人驾驶技术爱好者组成。他们希望通过开源的方式,让更多人参与到无人驾驶技术的研发和应用中来。
2. 技术架构:ArduPilot 采用分布式架构,包括硬件、软件和云端服务三个方面。硬件部分主要包括飞行控制器、传感器、电机驱动等;软件部分包括飞行控制算法、导航规划、通信协议等;云端服务则提供数据存储、远程监控和系统升级等功能。
3. 开发工具:ArduPilot 提供了一套完整的开发工具链,包括硬件设计、固件开发、仿真测试等。开发者可以使用这些工具快速搭建和测试自己的无人驾驶项目。
4. 开源精神:ArduPilot 遵循开源协议,允许开发者自由使用、修改和分享其代码和硬件设计。这使得 ArduPilot 社区吸引了众多开发者和爱好者,共同推动无人驾驶技术的发展。
5. 应用领域:ArduPilot 适用于各种无人驾驶项目,如无人机、无人船、无人驾驶车辆等。社区成员开发的无人驾驶产品涵盖了农业、航拍、物流、安防等多个领域。
6. 持续发展:随着无人驾驶技术的热度不断攀升,ArduPilot 社区也在不断扩大和发展。未来,ArduPilot 将继续致力于为开发者提供更好的工具和服务,推动无人驾驶技术的商业化应用。
总之,ArduPilot 是一个充满活力和创造力的无人驾驶技术开发社区。通过开源的方式,它为全球开发者提供了一个学习和交流的平台,共同推动无人驾驶技术的发展和创新。

背景
无人驾驶技术在多个领域都有广泛的应用前景,以下是几个典型的例子:
1. 矿山:无人驾驶技术在矿山领域的应用可以降低矿难风险,提高矿石开采效率。矿用卡车等重型设备可以实现自动驾驶,减少人为操作失误,降低事故发生概率。此外,无人驾驶设备还可以根据矿区地形和环境进行智能路径规划,提高运输效率。
2. 割草:在农业领域,无人驾驶割草机可以实现草地的自动化修剪,提高割草效率,降低人力成本。此外,无人驾驶割草机可以根据草地的实际情况进行智能调整,避免过度修剪和资源浪费。

3. 农业:无人驾驶拖拉机、无人驾驶插秧机等农业机械可以提高农业生产效率,降低农民的劳动强度。智能农业设备可以根据作物生长情况和土壤质量进行精准施肥、灌溉和播种,提高作物产量和品质。
4. 探测:在探险和地质探测领域,无人驾驶技术具有很大的优势。例如,无人驾驶直升机可以搭载高清摄像头、红外线探测器等设备,在险峻地区进行高效、安全的监测和侦查。无人驾驶无人机也可以在极端环境下进行地震、滑坡等灾害预警和救援工作。
5. 物流配送:无人驾驶货车和配送机器人可以在城市内进行智能物流配送,缓解交通压力,降低物流成本。通过优化路线规划和货物分配,无人驾驶物流系统可以实现更高效的配送服务。
6. 环卫清洁:无人驾驶扫地车、垃圾回收车等清洁设备可以自动完成道路清扫、垃圾回收等工作,提高城市清洁效率,降低环卫工人的工作强度。
总之,无人驾驶技术在多个领域具有广泛的应用前景。随着技术的不断发展和成熟,无人驾驶设备将为各行业带来更高的生产效率、更低的成本和更环保、智能的生活方式。

案例
用例
-
垂直起降搜索与救援

-
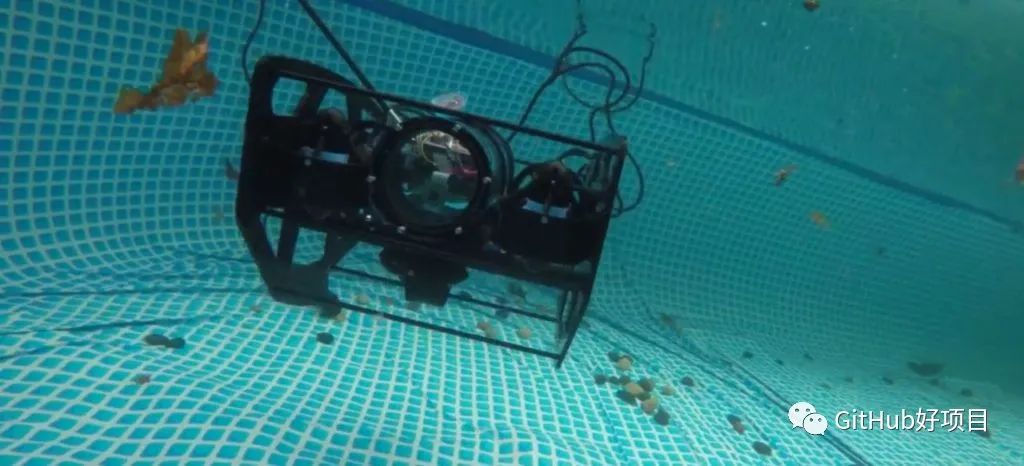
潜水式遥控潜水器
-
自主 割草机和拖拉机

-
自动驾驶汽车防撞

硬件部分
硬件支持各种 无人车、无人机、无人船等
具体请参考
https://ardupilot.org/
软件部分
软件分为 核心系统和固件
https://github.com/ArduPilot/ardupilot
构建代码
下面的链接文章解释了如何在 Linux/Ubuntu、MacOS 或 Windows 上设置构建环境,然后使用waf构建 ArduPilot 。
下面的说明假设您已经安装了 git、分叉并克隆了ArduPilot 存储库。
设置构建环境
-
在 Linux/Ubuntu 上设置构建环境
-
在 Windows 上设置构建环境
-
在 MacOSX 上设置构建环境
构建/编译
Linux / MacOSX 用户:
-
Linux 和 MacOSX 用户应使用 Waf 进行构建,如BUILD.md中所述。
在 Ubuntu 上设置
获取git
Git 是一个免费开源的分布式版本控制系统,用于管理 ArduPilot 代码库。Git 可在所有主要操作系统平台上使用,并且存在多种工具可以使其更轻松地入门。
git 命令行
Ubuntu
Linux/Ubuntu 用户可以使用 apt 安装:
sudo apt-get update
sudo apt-get install git
sudo apt-get install gitk git-gui
使用命令行克隆
-
打开终端并导航到您想要存储克隆的目录
-
克隆你的FORK:
git clone --recurse-submodules https://github.com/your-github-userid/ardupilot cd ardupilot
安装一些需要的包
如果您使用的是基于 debian 的系统(例如 Ubuntu 或 Mint),我们会提供一个脚本来为您完成此操作。从 ardupilot 目录:
Tools/environment_install/install-prereqs-ubuntu.sh -y
重新加载路径(注销并登录以使其永久):
. ~/.profile
现在您应该能够按照BUILD.md中的描述使用 waf 进行构建。
……
太多了,请参考官方网站 https://ardupilot.org/
学习代码,扶我起来,我能学

学习 ArduPilot 代码库
ArduPilot 代码库相当大(核心 ardupilot git 树大约有 70 万行),对于新用户来说可能相当吓人。本页旨在提供一些有关如何快速掌握代码的建议。它假设您已经熟悉 C++ 的关键概念,并且当前的许多示例假设您将在 Linux 系统上探索代码。
此页面和下面链接的页面旨在用作教程。您应该一步一步地完成每一页,边做边尝试。如果您认为某些重要信息缺失或可以改进,请在 wiki 上提出问题,我们将尽力解决。
教程步骤
-
介绍
-
库说明
-
库示例草图
-
传感器驱动器
-
螺纹加工
-
UART 和控制台
-
RC 输入和输出
-
存储和 EEPROM 管理
-
文件系统
-
EKF
-
直升机-车辆代码介绍
-
直升机 - 姿态控制
-
直升机 - 添加参数
-
直升机 - 添加新的飞行模式
-
Copter - 安排新代码间歇性运行
-
直升机 - 电机库
-
直升机 - PosControl 和导航
-
直升机 - 物体回避
-
直升机 - 添加自定义姿态控制器
-
Rover - 添加新的驾驶模式
-
Rover - L1 导航控制器
-
Plane - 架构概述
-
添加新的日志消息
-
添加新的 MAVLink 消息
-
添加新的 MAVLink 万向节
谁拥有操作系统,谁就有万亿美金的市值
操作系统在现代科技领域具有至关重要的地位,对于微软、谷歌、苹果等公司来说,其操作系统在市场上取得了巨大的成功,市值也相应地达到了万亿美金级别。苹果公司的核心是IOS,微软有windows, 谷歌有安卓。
而华为,多么努力,多么拼命!多么舍得投入
牛逼如华为,努力如华为,拼命如华为,敢投入研发如华为,至今还未拿到商业操作系统的入场券。
我们真的要支持华为!!!!!!!
现在,有一个万亿美金的机会,摆在你的面前,你要不要珍惜。
随着科技的不断发展,机器人操作系统在未来确实存在着巨大的市场空间。
原因有以下几点:
1. 智能化需求:随着人工智能技术的普及,越来越多的企业和机构开始关注并投入机器人领域的研发。机器人操作系统作为人工智能技术的重要载体,将广泛应用于工业、医疗、教育、家庭等多个场景,满足人们日益增长的智慧化需求。
2. 产业链整合:机器人操作系统将带动相关产业链的发展,包括硬件、软件、算法、传感器等多个环节。这将有助于推动我国产业结构升级,培育新的经济增长点。
3. 技术创新:机器人操作系统的发展将推动操作系统领域的技术创新,如实时性、可靠性、安全性等方面的提升,这些技术创新也将应用于其他领域,如自动驾驶、物联网等,拓展新的市场空间。
4. 国际合作:随着我国机器人产业的发展,国际合作将更加紧密,操作系统有望成为我国在全球市场发挥作用的重要载体,提升我国在国际市场的地位。
5. 人才培养:机器人操作系统的发展将带动人才培养,培育一批具备国际竞争力的操作系统研发人才,为我国科技产业的长远发展奠定基础。
综上所述,未来机器人操作系统确实存在着万亿美金的市场机会。然而,要抓住这一机遇,我国需要在操作系统研发、产业链整合、技术创新、国际合作和人才培养等方面加大投入和布局。同时,也需要关注市场动态,把握行业发展趋势,以确保在激烈的国际竞争中取得优势。
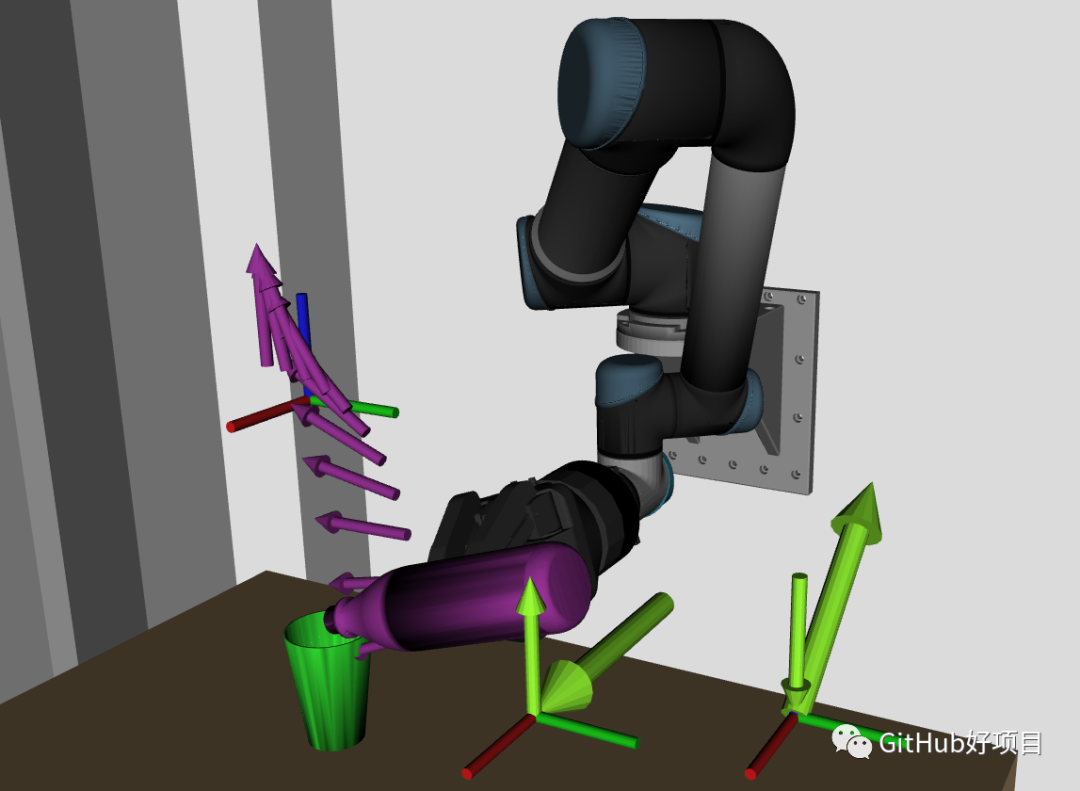
Moveit 一款开源、通用的机器人操作系统运动框架
MoveIt 已被社区用于超过 126 个机器人。从深海到外太空,从业余爱好到工业应用,请查看下面使用 MoveIt 与不同机器人的众多示例中的几个。
github地址:
https://github.com/ros-planning/moveit
国内源代码:
http://www.gitpp.com/yuanxiaoming/moveit

MoveIt 是一款开源的机器人运动规划框架,广泛应用于机器人领域,旨在为开发人员提供易于使用的平台,以开发高级应用、评估新设计以及将机器人集成到工业、商业、研究和开发等领域的产品中。MoveIt 集成了运动规划、操作、3D 感知、运动学、碰撞检测、控制和导航等 State-of-the-Art(SOTA)库,使得开发者能够在短时间内配置出一个功能完善的机器人系统。
MoveIt! 的核心组件是 movegroup,它作为一个集成器,将各个模块组合在一起,为用户提供了一套完整的 ROS 动作和服务。movegroup 用户界面允许开发者通过三种方式处理 actions 和 services:
1. 配置:movegroup 通过参数服务器(param server)获取机器人模型的配置信息,如 URDF、SRDF 以及 MoveIt 配置等。
2. 通信:movegroup 通过 ROS topics 和 actions 与机器人进行通信,获取机器人当前状态(如关节位置)、点云或其他感知数据,以及控制机器人控制器。
MoveIt 运动规划框架的优势在于其模块化设计,使得开发者能够快速地集成和配置机器人系统。此外,MoveIt 还提供了丰富的工具和算法,包括运动规划、碰撞检测等,以解决机器人运动过程中的各种问题。
MoveIt! 在开源社区中受到了广泛关注和应用,其稳定性、可靠性和广泛的支持使得它成为了机器人领域的热门选择。此外,MoveIt! 还与 Open Motion Planning Library(OMPL)等先进库相结合,进一步提高了机器人运动规划的性能和效率。
总之,MoveIt 是一款强大的机器人运动规划框架,它为开发人员提供了一个易于使用的平台,集成了各种先进技术和算法,使得开发者能够快速地开发出功能完善的机器人系统。无论是用于商业应用、研究还是教育,MoveIt 都是一个值得考虑的选择。

MoveIt2 是 MoveIt 的升级版本,相较于 MoveIt1,MoveIt2 在多个方面进行了改进和优化。MoveIt2 旨在提供更高效、更灵活的机器人运动规划解决方案。以下是 MoveIt1 和 MoveIt2 之间的主要区别:
1. 架构升级:MoveIt2 采用了更先进的架构,使得其在性能和稳定性方面得到了提升。MoveIt2 基于 ROS 2,而 MoveIt1 基于 ROS,这意味着 MoveIt2 能够更好地支持新版本的 ROS 系统。
2. 更好的兼容性:MoveIt2 改进了与不同机器人模型、控制器和其他软件包的兼容性,使得开发者能够更轻松地将 MoveIt2 集成到各种机器人系统中。
3. 运动规划算法优化:MoveIt2 引入了更先进的运动规划算法,如 Open Motion Planning Library(OMPL)的改进版本,以提高运动规划的效率和准确性。这使得 MoveIt2 在处理复杂场景时具有更高的性能。
4. 实时性增强:MoveIt2 优化了实时性能,特别是在实时伺服模式下。通过实时调整机器人控制策略,MoveIt2 能够实现更平滑、更稳定的机器人运动。
5. 易用性:MoveIt2 提供了一个更友好的用户界面和更完善的文档,使得开发者能够更容易地上手和使用 MoveIt2。
6. 社区支持:MoveIt2 得到了更广泛的社区支持和应用,这意味着开发者可以更容易地找到解决方案和资源,解决问题。
总之,MoveIt2 是 MoveIt1 的升级版本,具有更好的性能、兼容性、实时性和易用性。无论是机器人研究者、开发者还是教育工作者,MoveIt2 都是一个值得关注和使用的优秀平台。
MoveIt2简介
MoveIt2是专门为ROS 2从MoveIt迁移过来、主要用于机器人机械手或机械臂的运动规划软件框架,有助于将机器人带入未来。该框架综合了运动规划、机械(手)臂操纵、3D感知、运动学、控制和导航等方面的最新成果。
MoveIt2的主要功能
该软件框架的主要功能包括:
-
运动规划
-
生成可顺利通过杂乱环境的高自由度轨迹
-
生成的轨迹或者路径可以避免(逃离)局部最小值
-
-
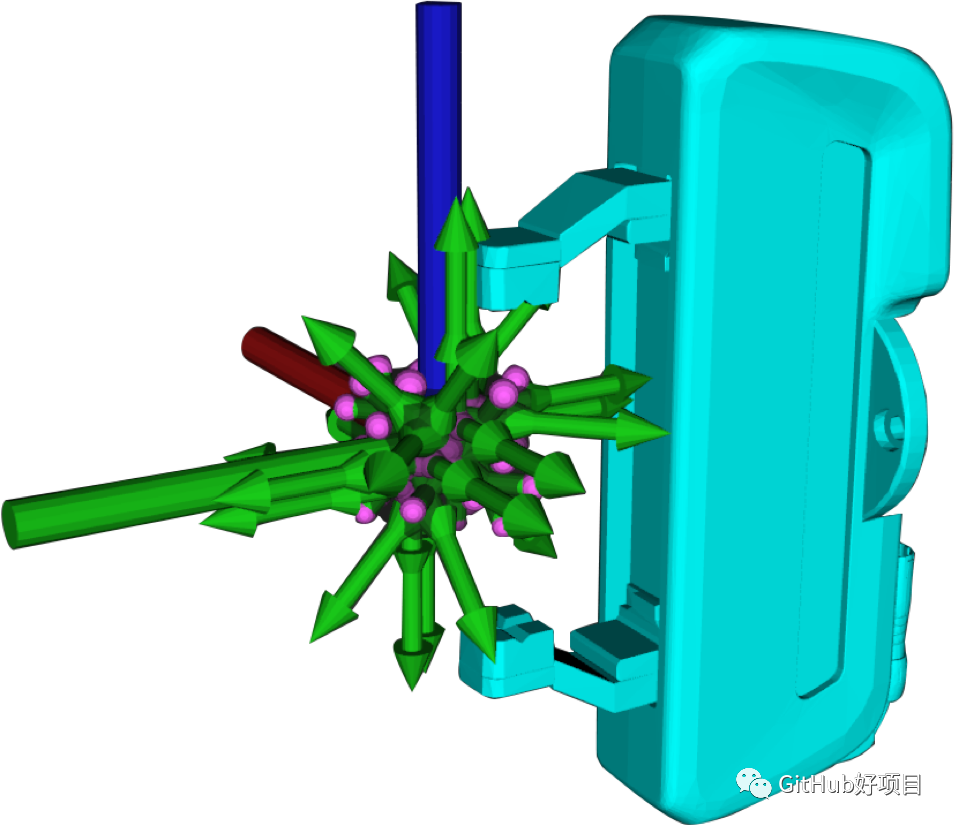
机械臂操纵
-
通过抓取生成(grasp generation)对机器人环境进行分析,并与该环境进行交互
-
-
逆运动学(Inverse Kinematics)
-
求解给定位姿的关节位置,甚至可用于过度制动的机械臂
-
-
控制
-
通过通用接口,对底层硬件控制器执行时间参数化的关节轨迹
-
-
3D感知
-
通过Octomaps,可以连接深度传感器和点云
-
-
碰撞检测
-
使用几何图元、网格或点云避开障碍物
-
机器人运动规划框架 MoveIt 主要致力于为机器人提供高效、精确的运动规划解决方案。MoveIt 通过对机器人进行抽象,将其运动规划问题转化为计算机可以处理的问题,从而实现机器人在复杂环境中的自主运动。
以下是 MoveIt 主要做的事情:
1. 抽象机器人模型:MoveIt 将机器人模型抽象到构形空间(C-Space),从而简化运动规划问题。用户只需提供机器人的 URDF 模型,MoveIt 即可自动生成运动轨迹。
2. 运动规划:MoveIt 整合了多个运动规划库,如 OMPL(Open Motion Planning Library),为用户提供多种路径规划算法。这些算法可以帮助机器人避免碰撞,沿着规划好的路径移动。
3. 碰撞检测:MoveIt 提供了碰撞检测功能,以确保机器人运动过程中不会与周围环境发生碰撞。这有助于保障机器人安全地执行任务。
4. 优化运动轨迹:MoveIt 可以通过对运动轨迹进行平滑处理,使得机器人运动更加平稳、自然。这有助于提高机器人执行任务的效率和精度。
5. 实时控制:MoveIt 支持实时运动控制,使机器人能够在实际环境中快速响应,提高实时性能。
6. 集成其他功能:MoveIt 还可以与其他机器人软件包、传感器和执行器等组件轻松集成,使用户可以方便地搭建完整的机器人系统。
总之,MoveIt 作为一个全面的机器人运动规划框架,为开发者提供了一套强大、灵活的解决方案,使得机器人能够在复杂环境中实现自主运动。通过 MoveIt,开发者可以轻松地创建、配置和优化机器人系统,以完成各种任务。
背景知识
ROS 2是什么
ROS 2(Robot Operating System 2)是一款用于构建机器人应用的软件库和工具集。相较于 ROS 1,ROS 2 在各方面都有所改进,例如:
1. 实时性:ROS 2 使用了实时消息传输机制,提高了系统的实时性能。
2. 兼容性:ROS 2 支持 Python 3 和 C++11 编程语言,同时兼容 ROS 1 的软件包和消息类型。
3. 模块化:ROS 2 采用了更模块化的设计,方便用户根据自己的需求选择和定制系统。
4. 灵活性:ROS 2 支持多种操作系统和硬件平台,适应性强。
5. 安全性:ROS 2 关注安全性,提供了加密和认证机制,保障数据传输的安全。
6. 社区支持:ROS 2 拥有活跃的社区支持,用户可以方便地获取技术支持和资源。
ROS 2 的工作空间和包管理相较于 ROS 1 也有所改进。工作空间分为 src、build、devel 和 install 四个目录,分别用于存放源码、编译中间文件、开发环境和最终安装文件。这种组织方式有助于更好地管理项目和资源。
在 ROS 2 中,包(package)是放置代码的最小单元,具有更高的独立性。用户可以轻松地创建、编译和安装功能包,提高开发效率。此外,ROS 2 还提供了更便捷的命令行工具,如 rosdep、colcon 等,用于管理依赖关系、构建和部署。
ROS 2 是一个功能强大、易于使用、高度灵活的机器人操作系统,广泛应用于机器人、自动化和智能领域。
MoveIt2的主要特征
该软件框架的主要特征有:
-
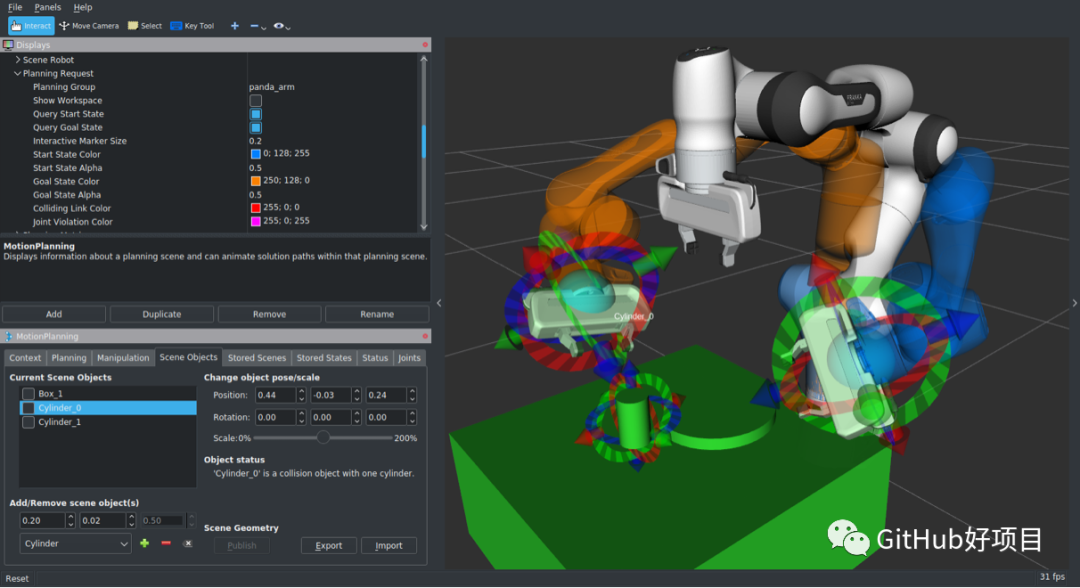
拥有3D交互式可视化工具Rviz,功能十分强大
-
该工具开箱即用的视觉展示功能允许新用户针对障碍物尝试各种避障规划算法。而在物理硬件上执行这些算法只需单击一下即可。
-
-
可充分利用仿真工具Gazebo,技术处于前沿
-
MoveIt通过充分利用基于物理的仿真工具,可以加速开发和测试周期。组合Gazebo、ROS Control和MoveIt,可以打造强大的机器人开发平台。
-

-
具有向导式配置助手,使用非常容易
-
通过使用逐步配置向导或者使用普遍的预配置设置,可以快速设置任何机器人以使用MoveIt。还可以配置Gazebo和ROS Control。
-

-
具有任务构造器,技术十分先进
-
可以一种灵活透明的方式来定义和规划由多个相互依赖的子任务组成的动作(actions)。
-
-
利用抓取生成技术,具有智能化特征
-
拥有基于几何和机器学习的抓取生成库,可用于MoveIt的机器人拾取和放置任务管道。
-
为什么要使用MoveIt2?
MoveIt是使用最广泛的机械臂操纵软件,已在150多种机器人上使用。该软件框架是根据 BSD 许可条款发布的,因此可以免费用于工业、商业和研究用途。
通过综合运动规划、机械臂操纵、3D感知、运动学、控制和导航方面的最新进展,MoveIt是最先进的移动机械臂操纵软件。
当前版本
截至目前(2021年10月),MoveIt2的版本为2.2,包含三个发行版或者分支,即适用于ROS 2 Foxy的Foxy 2.2 LST版本(长期支持版)、适用于ROS 2 Galactic的Galactic 2.2版本(推荐版本)、适用于ROS 2 Rolling的Rolling 2.2版本(开发版)。另外,目前维护的MoveIt版本为适用于ROS 1 Noetic的Noetic 1.1 LST版本。
更多详情官网 https://moveit.ros.org/

机器人运动规划框架 MoveIt 在商业上有着广泛的应用,主要体现在以下几个方面:
1. 工业自动化:MoveIt 可应用于工厂生产线、物流等领域,帮助机器人实现自动化装配、搬运、检测等任务,提高生产效率,降低成本。
2. 服务机器人:MoveIt 可用于酒店、商场等场所的服务机器人,实现自主导航、搬运物品、接待客人等任务,提高客户体验。
3. 医疗领域:MoveIt 可应用于医疗机器人,如手术机器人、康复机器人等,协助医生完成复杂手术,提高手术精度,减轻患者痛苦。
4. 无人驾驶:MoveIt 可用于无人驾驶车辆的运动规划,如自动驾驶汽车、无人机等,实现安全、高效的行驶。
5. 智能物流:MoveIt 可应用于智能物流系统,如无人仓库、无人配送等,提高物流效率,降低运营成本。
6. 农业机器人:MoveIt 可用于农业机器人,如植保无人机、采摘机器人等,提高农业生产效率,降低劳动强度。
7. 清洁机器人:MoveIt 可应用于地面清洁机器人、泳池清洁机器人等,实现自动化清洁,提高清洁效率。
8. 勘探机器人:MoveIt 可应用于地质勘探、矿业开采等领域的机器人,提高工作效率,降低安全风险。
此外,MoveIt 还可以应用于教育、科研等领域,助力机器人技术的发展和创新。总之,MoveIt 作为一个强大的机器人运动规划框架,其在商业领域的应用前景十分广阔。许多企业和研究机构已经开始采用 MoveIt 进行机器人开发,推动机器人技术在各行各业的应用。
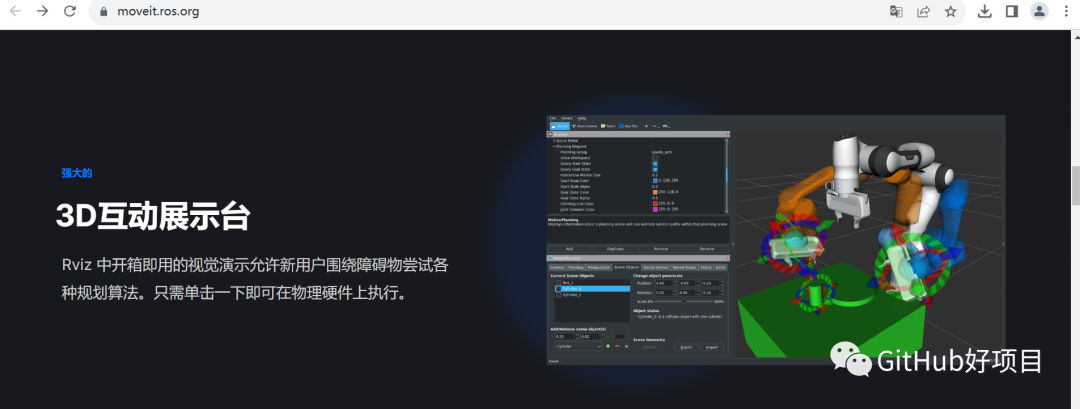
MoveIt 可以开发3D展示互动平台


原文链接:
智能推荐
攻防世界_难度8_happy_puzzle_攻防世界困难模式攻略图文-程序员宅基地
文章浏览阅读645次。这个肯定是末尾的IDAT了,因为IDAT必须要满了才会开始一下个IDAT,这个明显就是末尾的IDAT了。,对应下面的create_head()代码。,对应下面的create_tail()代码。不要考虑爆破,我已经试了一下,太多情况了。题目来源:UNCTF。_攻防世界困难模式攻略图文
达梦数据库的导出(备份)、导入_达梦数据库导入导出-程序员宅基地
文章浏览阅读2.9k次,点赞3次,收藏10次。偶尔会用到,记录、分享。1. 数据库导出1.1 切换到dmdba用户su - dmdba1.2 进入达梦数据库安装路径的bin目录,执行导库操作 导出语句:./dexp cwy_init/[email protected]:5236 file=cwy_init.dmp log=cwy_init_exp.log 注释: cwy_init/init_123..._达梦数据库导入导出
js引入kindeditor富文本编辑器的使用_kindeditor.js-程序员宅基地
文章浏览阅读1.9k次。1. 在官网上下载KindEditor文件,可以删掉不需要要到的jsp,asp,asp.net和php文件夹。接着把文件夹放到项目文件目录下。2. 修改html文件,在页面引入js文件:<script type="text/javascript" src="./kindeditor/kindeditor-all.js"></script><script type="text/javascript" src="./kindeditor/lang/zh-CN.js"_kindeditor.js
STM32学习过程记录11——基于STM32G431CBU6硬件SPI+DMA的高效WS2812B控制方法-程序员宅基地
文章浏览阅读2.3k次,点赞6次,收藏14次。SPI的详情简介不必赘述。假设我们通过SPI发送0xAA,我们的数据线就会变为10101010,通过修改不同的内容,即可修改SPI中0和1的持续时间。比如0xF0即为前半周期为高电平,后半周期为低电平的状态。在SPI的通信模式中,CPHA配置会影响该实验,下图展示了不同采样位置的SPI时序图[1]。CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出CPOL = 0,CPHA = 0:CLK空闲状态 = 低电平,数据在上升沿采样,并在下降沿移出。_stm32g431cbu6
计算机网络-数据链路层_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏8次。数据链路层习题自测问题1.数据链路(即逻辑链路)与链路(即物理链路)有何区别?“电路接通了”与”数据链路接通了”的区别何在?2.数据链路层中的链路控制包括哪些功能?试讨论数据链路层做成可靠的链路层有哪些优点和缺点。3.网络适配器的作用是什么?网络适配器工作在哪一层?4.数据链路层的三个基本问题(帧定界、透明传输和差错检测)为什么都必须加以解决?5.如果在数据链路层不进行帧定界,会发生什么问题?6.PPP协议的主要特点是什么?为什么PPP不使用帧的编号?PPP适用于什么情况?为什么PPP协议不_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输
软件测试工程师移民加拿大_无证移民,未受过软件工程师的教育(第1部分)-程序员宅基地
文章浏览阅读587次。软件测试工程师移民加拿大 无证移民,未受过软件工程师的教育(第1部分) (Undocumented Immigrant With No Education to Software Engineer(Part 1))Before I start, I want you to please bear with me on the way I write, I have very little gen...
随便推点
Thinkpad X250 secure boot failed 启动失败问题解决_安装完系统提示secureboot failure-程序员宅基地
文章浏览阅读304次。Thinkpad X250笔记本电脑,装的是FreeBSD,进入BIOS修改虚拟化配置(其后可能是误设置了安全开机),保存退出后系统无法启动,显示:secure boot failed ,把自己惊出一身冷汗,因为这台笔记本刚好还没开始做备份.....根据错误提示,到bios里面去找相关配置,在Security里面找到了Secure Boot选项,发现果然被设置为Enabled,将其修改为Disabled ,再开机,终于正常启动了。_安装完系统提示secureboot failure
C++如何做字符串分割(5种方法)_c++ 字符串分割-程序员宅基地
文章浏览阅读10w+次,点赞93次,收藏352次。1、用strtok函数进行字符串分割原型: char *strtok(char *str, const char *delim);功能:分解字符串为一组字符串。参数说明:str为要分解的字符串,delim为分隔符字符串。返回值:从str开头开始的一个个被分割的串。当没有被分割的串时则返回NULL。其它:strtok函数线程不安全,可以使用strtok_r替代。示例://借助strtok实现split#include <string.h>#include <stdio.h&_c++ 字符串分割
2013第四届蓝桥杯 C/C++本科A组 真题答案解析_2013年第四届c a组蓝桥杯省赛真题解答-程序员宅基地
文章浏览阅读2.3k次。1 .高斯日记 大数学家高斯有个好习惯:无论如何都要记日记。他的日记有个与众不同的地方,他从不注明年月日,而是用一个整数代替,比如:4210后来人们知道,那个整数就是日期,它表示那一天是高斯出生后的第几天。这或许也是个好习惯,它时时刻刻提醒着主人:日子又过去一天,还有多少时光可以用于浪费呢?高斯出生于:1777年4月30日。在高斯发现的一个重要定理的日记_2013年第四届c a组蓝桥杯省赛真题解答
基于供需算法优化的核极限学习机(KELM)分类算法-程序员宅基地
文章浏览阅读851次,点赞17次,收藏22次。摘要:本文利用供需算法对核极限学习机(KELM)进行优化,并用于分类。
metasploitable2渗透测试_metasploitable2怎么进入-程序员宅基地
文章浏览阅读1.1k次。一、系统弱密码登录1、在kali上执行命令行telnet 192.168.26.1292、Login和password都输入msfadmin3、登录成功,进入系统4、测试如下:二、MySQL弱密码登录:1、在kali上执行mysql –h 192.168.26.129 –u root2、登录成功,进入MySQL系统3、测试效果:三、PostgreSQL弱密码登录1、在Kali上执行psql -h 192.168.26.129 –U post..._metasploitable2怎么进入
Python学习之路:从入门到精通的指南_python人工智能开发从入门到精通pdf-程序员宅基地
文章浏览阅读257次。本文将为初学者提供Python学习的详细指南,从Python的历史、基础语法和数据类型到面向对象编程、模块和库的使用。通过本文,您将能够掌握Python编程的核心概念,为今后的编程学习和实践打下坚实基础。_python人工智能开发从入门到精通pdf