Ubuntu18.04安装ROS-程序员宅基地
技术标签: 机器人
目录
一、安装ROS
1、ROS简介
机器人操作系统(Robot Operating System, ROS)是一个应用于机器人上的操作系统,它操作方便、功能强大,特别适用于机器人这种多节点多任务的复杂场景。
2、安装ROS
添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

添加密钥(用于软件安装,如果之前已经完成密钥添加可忽略)
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
安装ROS
sudo apt update
sudo apt-get install ros-melodic-desktop-full
安装 rosdep
sudo apt install python-rosdep
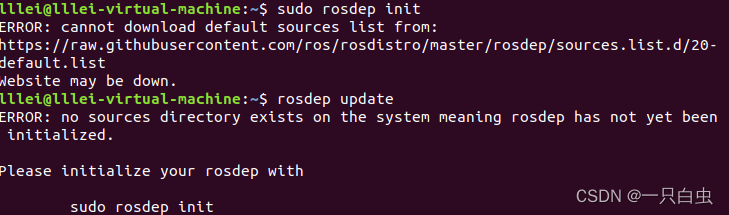
初始化rosdep
sudo rosdep init
rosdep update
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc

安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
二、ROS初步使用
1、小海龟
启动ROS Master
roscore
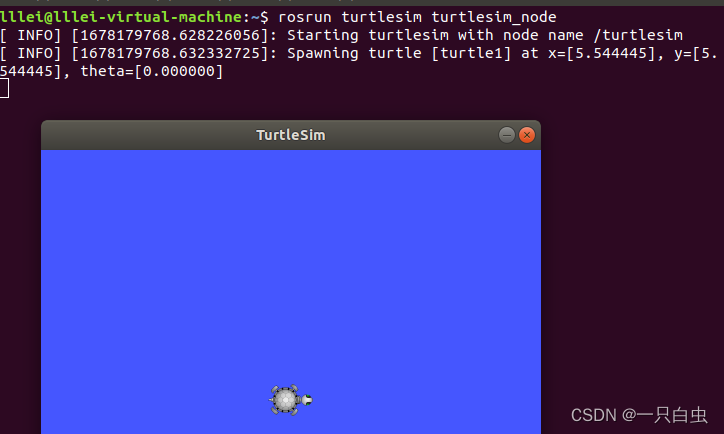
启动小海龟仿真器(启动ROS Master后重新打开一个终端再输入)
rosrun turtlesim turtlesim_node
启动海龟控制节点 (启动小海龟仿真器后重新打开一个终端再输入)
rosrun turtlesim turtle_teleop_key
将鼠标指针放在该窗口即可利用键盘的上下左右控制小海龟移动

2、控制小海龟走圆形
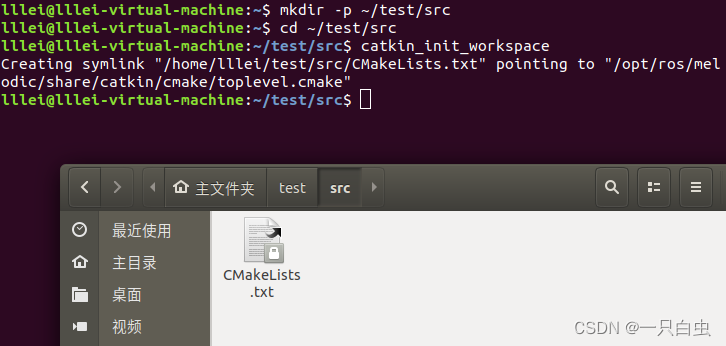
(1)、创建工作空间
mkdir -p ~/test/src
cd ~/test/src
catkin_init_workspace
(2)、编译工作空间
cd ~/test
catkin_make
(3)、配置环境变量
在test路径下终端输入source devel/setup.bash,使系统知道功能包放置在test这个工作空间下。
查看当前环境变量,终端输入echo $ROS_PACKAGE_PATH
$ source devel/setup.bash
$ echo $ROS_PACKAGE_PATH

(4)、画圆程序的编写
在test/src路径下新建my_turtle_package包
$ cd test/src #进入工作空间
$ catkin_create_pkg my_turtle_package rospy roscpp #新建my_turtle_package包

在my_turtle_package/src 中创建cpp文件
$ cd my_turtle_package/src/
$ touch draw_circle.cpp
编写画圆代码
gedit draw_circle.cpp添加代码
#include "ros/ros.h"
#include<geometry_msgs/Twist.h> //运动速度结构体类型 geometry_msgs::Twist的定义文件
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_ctrl"); //对该节点进行初始化操作
ros::NodeHandle n; //申明一个NodeHandle对象n,并用n生成一个广播对象vel_pub
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
//vel_pub会在主题"/cmd_vel"(机器人速度控制主题)里广播geometry_msgs::Twist类型的数据
ROS_INFO("draw_circle start...");//输出显示信息
while(ros::ok())
{
geometry_msgs::Twist vel_cmd; //声明一个geometry_msgs::Twist 类型的对象vel_cmd,并将速度的值赋值到这个对象里面
vel_cmd.linear.x = 2.0;//前后(+-) m/s
vel_cmd.linear.y = 0.0; //左右(+-) m/s
vel_cmd.linear.z = 0.0;
vel_cmd.angular.x = 0;
vel_cmd.angular.y = 0;
vel_cmd.angular.z = 1.8; //机器人的自转速度,+左转,-右转,单位是rad/s
vel_pub.publish(vel_cmd); //赋值完毕后,发送到主题"/cmd_vel"。机器人的核心节点会从这个主题接受发送过去的速度值,并转发到硬件体上去执行
ros::spinOnce();//调用此函数给其他回调函数得以执行(比例程未使用回调函数)
}
return 0;
}
打开CMakeLists.txt
$ cd ~/test/src/my_turtle_package
$ gedit CMakeLists.txt
在Declare a C++ executable前添加
add_executable(draw_circle src/draw_circle.cpp)
target_link_libraries(draw_circle ${catkin_LIBRARIES})
编译
$ cd ~/test/
$ catkin_make

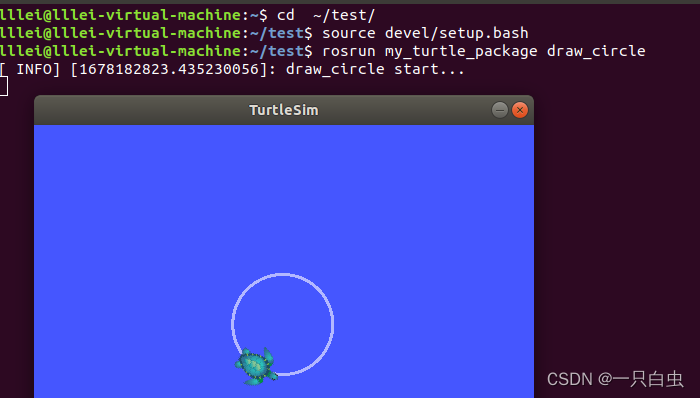
(5)、控制小海龟走圆形
启动ROS
roscore启动小海龟仿真器
rosrun turtlesim turtlesim_node小海龟画圆
$ cd ~/test/
$ source devel/setup.bash
$ rosrun my_turtle_package draw_circle
三、总结
本次实验主要是对ROS环境配置和对ROS的初步使用,在环境配置中非常顺利,没有遇到较大问题,通过本次实验对ROS有了初步实践了解。
智能推荐
latex h t b p是什么意思_latex htpb-程序员宅基地
文章浏览阅读1.4w次,点赞9次,收藏17次。常用选项[htbp]是浮动格式:『h』当前位置。将图形放置在正文文本中给出该图形环境的地方。如果本页所剩的页面不够,这一参数将不起作用。『t』顶部。将图形放置在页面的顶部。『b』底部。将图形放置在页面的底部。『p』浮动页。将图形放置在一只允许有浮动对象的页面上。在table或者figure 后加 [!htb] 是系统忽略“美学”标准,把表格和图片插入到你的代码中,是动的,但是不加感叹号,它就是按顺序选择h(此处),t(上方),b(下方),所以为了让图片随着你的代码移动,最好加一个[!htb]_latex htpb
【转载】linux下的usb抓包方法-程序员宅基地
文章浏览阅读67次。1 linux下的usb抓包方法1、配置内核使能usb monitor:make menuconfigDevice Drivers --> USB Support --> USB Monitor --> Sel..._linux安装tcpdump 查看usb
计算机组成pc em ir,计算机组成 课程设计报告.doc-程序员宅基地
文章浏览阅读164次。计算机组成 课程设计报告计算机组成原理课程设计报告姓 名:班 级:学 号:指导老师:2016年 6月31日目 录第一章 背景知识与课设任务概述11.1课设目的11.2课设任务11.2111.2211.2321.2421.252第二章 课设内容32.1指令的执行流程32.1.132.1.242.1.352.2存储器62.2.162.3运算器72.3.172.4硬件系统组成122.4..._计算机组成课程设计报告
python青果教务系统抢课_名额不够,技术来凑,利用Python实现教务系统强制性抢课...-程序员宅基地
文章浏览阅读1.3k次。最近一学期一次的抢课大戏又来了,几家欢乐几家愁。O(∩_∩)O哈哈~(l我每次一选就过了hah,我还是有欧的时候滴)。看着他们盯着教务系统就着急,何况我们那教务系统,不想说什么。emmm 想周围的朋友,正好下午利用扩容前一段时间写了个小脚本帮助朋友抢课。(当然抢到了啦,^_^)私信小编001即可获取大量Python学习资料,名额有限因为时间不够,来不及仔细琢磨,我第一想法就是直接提交选课的数据包(..._青果教务系统抢课
windows 加 switchyomega + burp 抓https包-程序员宅基地
文章浏览阅读4.6k次。很简单,下载证书后导入到受信任根目录证书下载,直接在代理状态浏览器访问burp点击CA就可以下载了 设置该证书全部信任,,switchyomega 设置如下即可 就可以抓https的包了 ...
用C语言写循环赛日程表,循环赛的方法与编排-程序员宅基地
文章浏览阅读1k次。一、循环赛的种类与特点(一)循环赛的种类循环赛又称循环法。是指参赛队(或个人,下同)之间,都要互相轮流比赛,最后按照各参赛队在全部比赛中的胜负场数、得分多少排定名次的比赛方法。它在对抗性项目比赛中经常被采用。循环赛包括单循环、双循环或分组循环三种。单循环是所有参赛队(人)相互轮赛一次;双循环是所有参赛队(人)相互轮赛二次;分组循环是参赛队(人)较多时,采用种子法,把强队(人)分散在各组,先进行小组..._c语言循环赛互打一场比赛 甲队两胜
随便推点
507页XX市应急管理局智慧矿山煤矿数字化矿山技术解决方案_18万字应急管理局智慧矿山煤矿数字化矿山技术解决方案word-程序员宅基地
文章浏览阅读542次。只有在单系统自动化的基础上,通过高速网络接入各单系统,充分数据融合,建立合理的联动机制才能完成从单系统自动化到综合自动化的转变,该部分的转变从投入的资金和实现的容易度相对来讲可实现性和可控性都比较容易,但是从综合自动化向数字化矿山发展,涉及的面比较广,必须由多方共同来推进,一般涉及到“综合自动化”、“空间数字化”及“管理信息化”三大方面,三者缺一不可,通过三者的有机融合,再通过合适的平台例如三维可视化平台进行展示,同时通过科学合理的管理制度和流程加以应用才是真正意义上有血有肉的数字化矿山。_18万字应急管理局智慧矿山煤矿数字化矿山技术解决方案word
Tomcat官网地址-程序员宅基地
文章浏览阅读1.4w次,点赞8次,收藏7次。Tomcat官网地址_tomcat官网
汇编指令长度计算_汇编指令占多少字节-程序员宅基地
文章浏览阅读5.1k次,点赞11次,收藏58次。指令长度与寻址方式有关系,规律或原则如下:一、没有操作数的指令,指令长度为1字节。如es:ds:cbwxlat等。二、操作数只涉及寄存器的指令,指令长度为2字节。如mov al,[si]mov ax,[bx+si]mov ds,ax等。三、操作数涉及内存地址的指令,指令长度为3字节。如mov al,[bx+1]mov ax,[bx+si+3]lea di,[1234]mov [2345],ax等。四、操作数涉及立即数的指令,指令长度为:寄存器类型+2。8位寄存器,寄存器_汇编指令占多少字节
二、RSA加密_ctf rsa 多个n和多个c-程序员宅基地
文章浏览阅读3.4k次。CTF中的RSA及攻击方法笔记1 数论基础1.1 模运算规则2 RSA相关题目2.1 已知 n,e,c 求 m2.2 已知 p,q,e 求 d2.3 已知dp,dq,c,p,q 求m2.4 仅已知c,c特别大 【c = m^e mod n】2.5 已知n1,n2,c1,c2,n 求 m2.6 已知n1,n2,e,c2 求m2.7 已知e,d,N 求p,q1 数论基础参考链接:https://www.freebuf.com/articles/web/257835.html1.1 模运算规则模运算与基_ctf rsa 多个n和多个c
mysql中把bigint类型转换为时间格式,与hive中unix_timestamp、FROM_UNIXTIME两个函数之间的区别_bigint转日期-程序员宅基地
文章浏览阅读2w次,点赞4次,收藏15次。数据库中时间类型是这样的,13位bigInt类型的数据select date_format(FROM_UNIXTIME(列名/1000),'%Y%m%d') from xx表原理就是把13位的时间格式/1000等于时间戳,使用FROM_UNIXTIME把时间戳转换成具体的日期ps:将时间转换为时间戳select unix_timestamp('2018-08-30..._bigint转日期
exit status 5: �ܾ����ʡ� exit status 1: ���_exit status 5: exit status 1:-程序员宅基地
文章浏览阅读1.1k次。使用nvm切换node版本出现上述乱码时。使用管理员模式打开CMD就可以解决了~_exit status 5: exit status 1: