unity物体四种移动方法总结_unity物体移动-程序员宅基地
目录
一.通过修改位置来实现移动
利用修改Transform组件的position的两种常用方法。
1.使用Translate()函数。
2.,直接指定新的位置

将上述两种方法在void Update()实现每一帧物体向x方向移动1.5个单位,具体代码如下:
void Update()
{
transform.Translate(1.5f,0,0);
//或
transform.position += new Vector3(1.5f,0,0);
}注意:此处1.5为啥要写1.5f,根据C#的语法规定,直接写1.5会被认为double类型的数,而这里需要flaot类型数,三个数据只要其中一个带有f就行。
由于电脑无法保证稳定的帧率,会出现帧率高,物体移动就快,帧率低,物体移动就慢。而在游戏开发大部分情况中,我们应该确保”每秒移动同样的距离”,因此,我们应该做如下修改。
void Update()
{
transform.Translate(1.5f*Time.deltaTime,0,0);
//或
transform.position += new Vector3(1.5f*Time.deltaTime,0,0);
}此处*Time.deltatime是确保每秒移动同样的距离。
Time.deltatime 是两帧之间的间隔,如帧率为60帧/秒,则Time.deltatime =0.0167秒,或者帧率为10帧/秒,则Time.delatatime = 0.1秒。所以Time.delatatime是一个随帧率改变而改变的数值,确保物体每秒移动的数值是一样的。
ps:Time.deltatime是一个很小的数值,因此与他相乘的数值应该大些。
二.通过物理系统实现位移
适用于对已经挂载刚体组件的物体
以下是常用的两种方法
1。利用AddForce()对物体施加力改变位置
注意:一定要给物体挂载刚体,物体才会收到力的作用
此处AddForce()的参数为Vector3类型,该参数用一个向量表示力,且符合牛顿力学
这里表示每帧(时间)对物体轴方向施加100N的力,根据牛顿力学,力至少持续一点时间才会引起物体速度的变化。所以此处必有位移,具体的位移,由你施加的力跟每帧的时间有关。在游戏开发中,我们只需要一边测试一边修改,确保一个合适数值即可。
2.直接修改物体的速度
此处表示物体在X轴以10m/s的速度移动,y轴跟z轴方向速度保持不变。
此方法相比上一个方法能让物体直接跳过加速度引起速度变化的步骤,使物体能够匀速运动。
注意:物理系统对于时间是非常敏感的。
举个例子:我们需要子弹0.1秒后击中目标,当更新频率不一定,子弹0.3秒才击中目标,这不是我们想要的。
当设备运行不流畅的时候,帧率下降,Time.deltatime会变大,不在适用。所以我们应该做如下修改,利用FixedUpdate()函数,可以保证稳定的间隔。获取两段Update之间的时间间隔为Time.deltatime,而获得两次FixedUpdate之间的时间间隔为Time.fixedDeltaTime,一般Time.fixedDeltaTime是一个固定的值(默认为0.0.2秒,可通过Edit——Project Setting——Time来修改)。
修改代码如下:
public Rigidbody rb;
void FixedUpdate()
{
rb.AddForce(10*Time.fixedDeltaTime,0,0);
//或
rb.velocity = new Vector3(10*Time.fixedDeltaTime,rb.velocity .y,rb.velocity.z);
}三.通过输入控制物体移动
以键盘的W、A、S、D为例
参考unity的输入管理器的横轴输入与纵轴输入
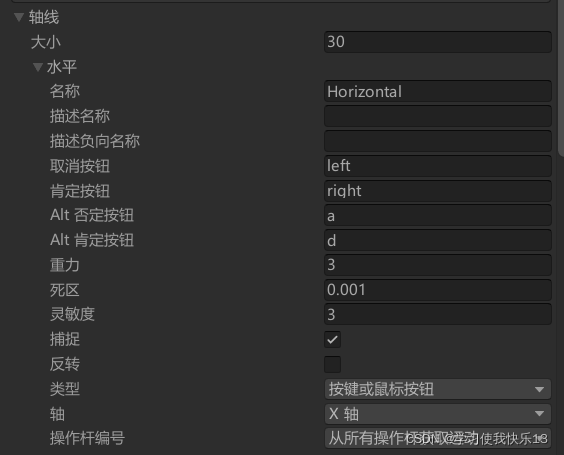
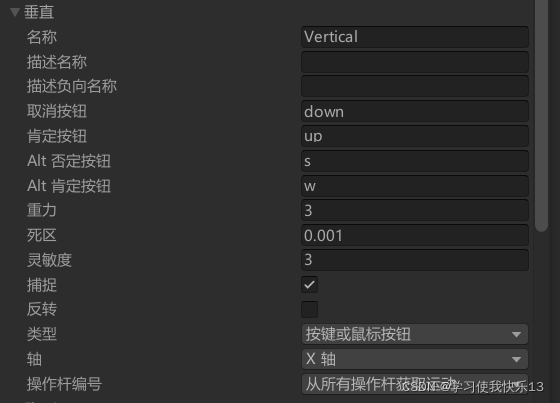
常利用Input.GetAxis()与Input.GetAxisRaw()
两者区别,前者范围为-1~1,后者范围为1,0,1
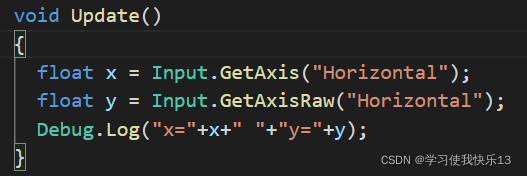
输入以上代码,可以通过Console查看输入值。
由于
我们可以通过简单的相乘将物体移动联系起来,这里我们采用GetAxis()见下图
第一种方法
void Update()
{
float horizontal = Input.GetAxis("Horizontal");
float vetical = Input.GetAxis("Vetical");
transform.Translate(horizontal*speed*Time.deltaTime,vetical*speed*Time.deltaTime,0);
//或
transform.position += new Vector3(horizontal*speed*Time.deltaTime,vetical*speed*Time.deltaTime,0);
}此处的speed为一个变量,我们可以通过修改speed来控制物体移动的距离。
假设我们定义 float speed =10;
即此处每帧最大的位移为1*10*0.0167=0.167米。
第二种方法
public Rigidbody rb;
public float speed;
void FixedUpdate()
{
float horizontal = Input.GetAxis("Horizontal");
float vetical = Input.GetAxis("Vetical");
rb.AddForce(horizontal*speed*Time.fixedDeltaTime,vetical*speed*Time .fixedDeltaTime,0);
//或
rb.velocity = new Vector3(horizontal*speed*Time.fixedDeltaTime,vetical*speed*Time.fixedDeltaTime,rb.velocity.z);
}通过上述的两种方法,我们就可以实现,每当按下相应的键,物体就会往相应的方向移动一定的距离。
智能推荐
在ubuntu 8.04下安装Oracle 11g二-程序员宅基地
文章浏览阅读408次。 在ubuntu 8.04下安装Oracle 11g2008年05月22日 星期四 11:02oracle 11g 数据库虽然提供了linux x86的版本,但是支持的linux版本只有Red Hat,Novell and Solaris 这几个,debian 和 ubuntu 不在支持之列,所以在ubuntu下安装就相对麻烦一些,请照着下文的方法一步一步的安装,不
初一计算机知识点下册,初一英语下册语法知识点全汇总-程序员宅基地
文章浏览阅读166次。新东方在线中考网整理了《初一英语下册语法知识点全汇总》,供同学们参考。一. 情态动词can的用法can+动词原形,它不随主语的人称和数而变化。1. 含有can的肯定句:主语+can+谓语动词的原形+其他。2. 含有can的否定句:主语+can't+动词的原形+其他。3. 变一般疑问句时,把can提前:Can+主语+动词原形+其他? 肯定回答:Yes,主语+can。否定回答:No,主语+can't...._七年级下册计算机知识点
NX/UG二次开发—其他—UFUN函数调用Grip程序_uf调用grip-程序员宅基地
文章浏览阅读3k次。在平时开发中,可能会遇到UFUN函数没有的功能,比如创建PTP的加工程序(我目前没找到,哪位大神可以指点一下),可以使用Grip创建PTP,然后用UFUN函数UF_call_grip调用Grip程序。具体如下截图(左侧UFUN,右侧Grip程序):..._uf调用grip
Android RatingBar的基本使用和自定义样式,kotlin中文教程_ratingbar样式修改-程序员宅基地
文章浏览阅读156次。第一个:原生普通样式(随着主题不同,样式会变)第二个:原生普通样式-小icon第三个:自定义RatingBar 颜色第四个:自定义RatingBar DrawableRatingBar 各样式实现===============原生样式原生样式其实没什么好说的,使用系统提供的style 即可<RatingBarstyle="?android:attr/ratingBarStyleIndicator"android:layout_width=“wrap_cont.._ratingbar样式修改
OpenGL环境搭建:vs2017+glfw3.2.1+glad4.5_vs2017的opengl环境搭建(完整篇)-程序员宅基地
文章浏览阅读4.6k次,点赞6次,收藏11次。安装vs2017:参考vs2017下载和安装。安装cmake3.12.3:cmake是一个工程文件生成工具。用户可以使用预定义好的cmake脚本,根据自己的选择(像是Visual Studio, Code::Blocks, Eclipse)生成不同IDE的工程文件。可以从它官方网站的下载页上获取。这里我选择的是Win32安装程序,如图所示:然后就是运行安装程序进行安装就行。配置glfw3...._vs2017的opengl环境搭建(完整篇)
在linux-4.19.78中使用UBIFS_ubifs warning-程序员宅基地
文章浏览阅读976次。MLC NAND,UBIFS_ubifs warning
随便推点
计算机系统内存储器介绍,计算机系统的两种存储器形式介绍-程序员宅基地
文章浏览阅读2.2k次。计算机系统的两种存储器形式介绍时间:2016-1-6计算机系统的存储器一般应包括两个部分;一个是包含在计算机主机中的主存储器,简称内存,它直接和运算器,控制器及输入输出设备联系,容量小,但存取速度快,一般只存放那些急需要处理的数据或正在运行的程序;另一个是包含在外设中的外存储器,简称外存,它间接和运算器,控制器联系,存取速度虽然慢,但存储容量大,是用来存放大量暂时还不用的数据和程序,一旦要用时,就..._计算机存储器系统采用的是主辅结构,主存速度快、容量相对较小,用于 1 分 程序,外
西门子PLC的编程工具是什么?_西门子plc编程软件-程序员宅基地
文章浏览阅读5.6k次。1. STEP 7(Simatic Manager):STEP 7或者Simatic Manager是西门子PLC编程最常用的软件开发环境。4. STEP 7 MicroWin:STEP 7 MicroWn是一款专门针对微型PLC(S7-200系列PLC)的编程软件,是Simatic Manager的简化版。如果需要与PLC系统配合使用,则需要与PLC编程工具进行配合使用。除了上述软件之外,西门子还提供了一些配套软件和工具,如PLC模拟器、硬件调试工具等,以帮助PLC编程人员快速地进行调试和测试。_西门子plc编程软件
HashMap扩容_hashma扩容-程序员宅基地
文章浏览阅读36次。【代码】HashMap扩容。_hashma扩容
Eclipse maven项目中依赖包不全,如何重新加载?_maven资源加载不全,怎么重新加载-程序员宅基地
文章浏览阅读2.9k次。1mvn dependency:copy-dependencies2 项目右键 -> Maven -> Disable Maven Nature3 项目右键 -> Configure -> Convert to Maven Project_maven资源加载不全,怎么重新加载
mysql dml全称中文_MySQL语言分类——DML-程序员宅基地
文章浏览阅读527次。DMLDML的全称是Database management Language,数据库管理语言。主要包括以下操作:insert、delete、update、optimize。本篇对其逐一介绍INSERT数据库表插入数据的方式:1、insert的完整语法:(做项目的过程中将字段名全写上,这样比较容易看懂)单条记录插入语法:insert into table_name (column_name1,......_dml的全称是
【小工匠聊Modbus】04-调试工具-程序员宅基地
文章浏览阅读136次。可以参考: http://git.oschina.net/jrain-group/ 组织下的Java Modbus支持库Modbus-系列文章1、虚拟成对串口(1)下载虚拟串口软件VSPD(可在百度中搜索)image.png(2)打开软件,添加虚拟串口。在设备管理中,看到如下表示添加成功。..._最好用的 modebus调试工具