磁力计LIS2MDL开发(2)----电子罗盘_电子罗盘csdn-程序员宅基地
技术标签: 电子罗盘 stm32cube stm32cubemx 指南针 磁场 磁力计 传感器 LIS2MDL mems 单片机
概述
本文将介绍如何使用 LIS2MDL 传感器来读取数据来转化为指南针。
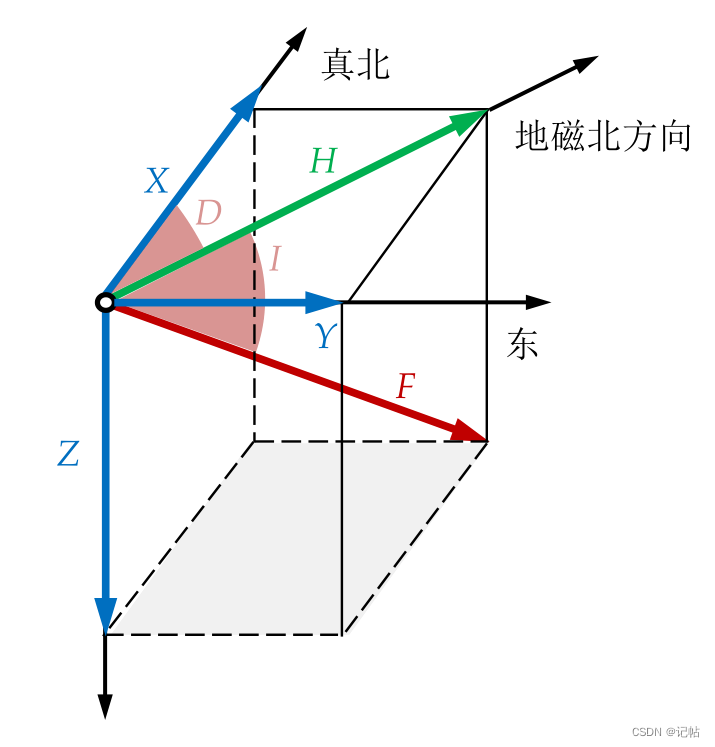
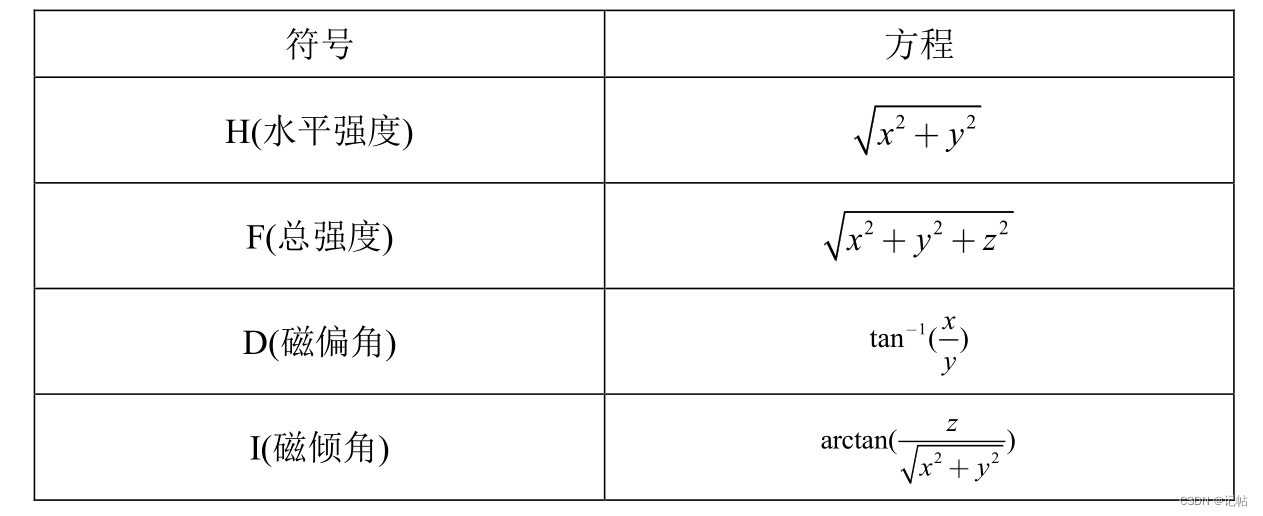
地磁场强度范围约为 23,000 至 66,000 nT ,并且可以建模为磁偶极子,其场线起源于地球地理南部附近的点,并终止于磁场附近的点。磁场具有七个分量,如图 所示。x,y和z分别表示北分量,东分量和垂直分量的磁场强度。H代表总水平强度,F代表磁场的总强度,而D和I分别代表磁偏角和磁倾角。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
https://www.bilibili.com/video/BV1xG411a7cs/
磁力计LIS2MDL开发(2)----电子罗盘
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
https://download.csdn.net/download/qq_24312945/88634988
环境磁场建模
尽管可以选择七个不同的元素来处理给定点的磁场,但并非所有元素都是进行定位的理想选择。X,Y 和 Z 的三个元素是从磁力计获得的基本值,而其他四个元素是使用这些元素来计算的。前三个元素随移动设备方位角的改变而偏离,因此,对于许多基于磁场的室内定位系统通常假设以固定方位工作,行人可以更改方向,但不能更改设备方位。
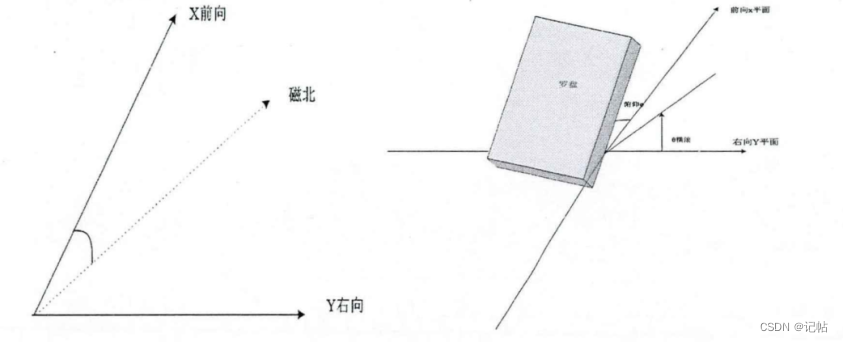
在大地坐标系的水平面上,假设磁北和x轴的夹角为a, x方向的磁分量是Mx,y方向的分量是My,则
ɑ=arctan(My/Mx)
这是电子罗盘定向的基本原理。实际应用中,电子罗盘不能总是保持在水平面上,如下图所示一样存在俯仰角和横滚角。将罗盘坐标系下的 z轴向下, 3个轴的磁分量投影到水平面上可以得到Xh,Yh,相应的磁感应值:
Xh=Xcosф+Ysinфsinθ - Zsinфcosθ
Yh=Ycosθ + Zsinθ
相应的
ɑ=arctan(Yh/Xh)
Angle_XY=atan2( (magnetic_mG[1]-Xoffset),(magnetic_mG[0]-Yoffset) ) * (180/3.14159265)+180;//计算角度
Angle_XZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[0]-Yoffset) ) * (180/3.14159265)+180;//计算角度
Angle_YZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[1]-Yoffset) ) * (180/3.14159265)+180;//计算角度
消除硬铁误差
电子罗盘有两种工作模式,一种是正常工作模式,另一种是出厂设置模式,这种出场设置模式就是为了消除硬铁干扰。硬铁干扰产生于永久磁铁,和被磁化的金属,或罗盘平台上的钢。这些干扰会保持大小恒定,与罗盘的相对位置固定,而与罗盘指向无关。所以当罗盘安装好后,它周围的硬铁干扰就几乎不会改变了,只要对罗盘做一次准确的标定,就能很轻松的消除这项干扰。
硬铁干扰在罗盘输出的每个轴向加了一个定值,输出曲线图的圆心被移动了,对于航向的影响则是一个周期性的误差,如下图所示在理想状态时,在 360 度范围内,传感器输出极值分别为 ymax ymin xmax xmin 坐标原点为O,受到硬铁干扰后,极值变为 y’max ,y’min , x’max , x’max , 坐标原点变为O’ 。要消除硬铁干扰,可以将罗盘和平台旋转一周,得
到圆上的足够的点再得到圆心偏移。
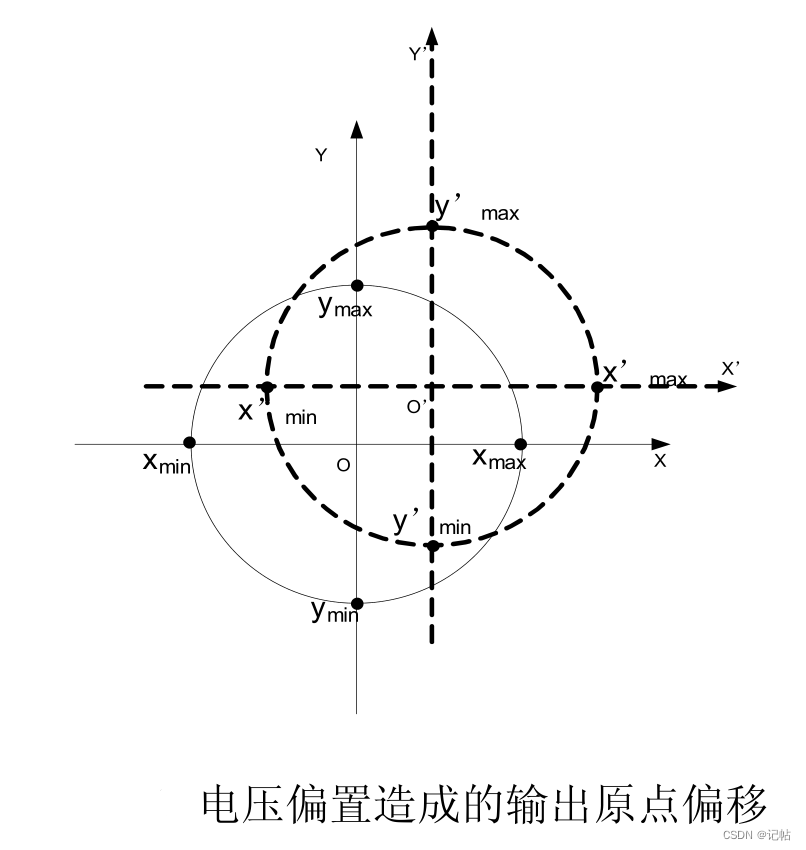
具体操作过程如下:接通电源后,将罗盘匀速旋转,使微控制器采集 360 °范围内的数据,通过数值比较,找出 x 、 y 方向的极值,得出偏移坐标 O’, 即电桥的偏置电压,并将此电压值保存,每次罗盘读数时都会减去此偏移。实际上,本设计在方位角的计算过程就是此过程,所以在计算方位角的同时已经消除了硬铁干扰。这种方法也可以消除由于温度漂移产生的误差。
软铁干扰
软铁干扰来源于地球磁场和罗盘附近的任何磁性材料之间的相互作用,同硬铁材料一样,软金属也干扰地球的磁力线,不同点是,软磁的干扰程度,与罗盘的方向有关。对软铁干扰的校正,比较复杂,下面讨论采用霍尼韦尔公司的 Michal.J.Caruso 提出椭圆假设的误差补偿原理进行误差补偿的方法 。
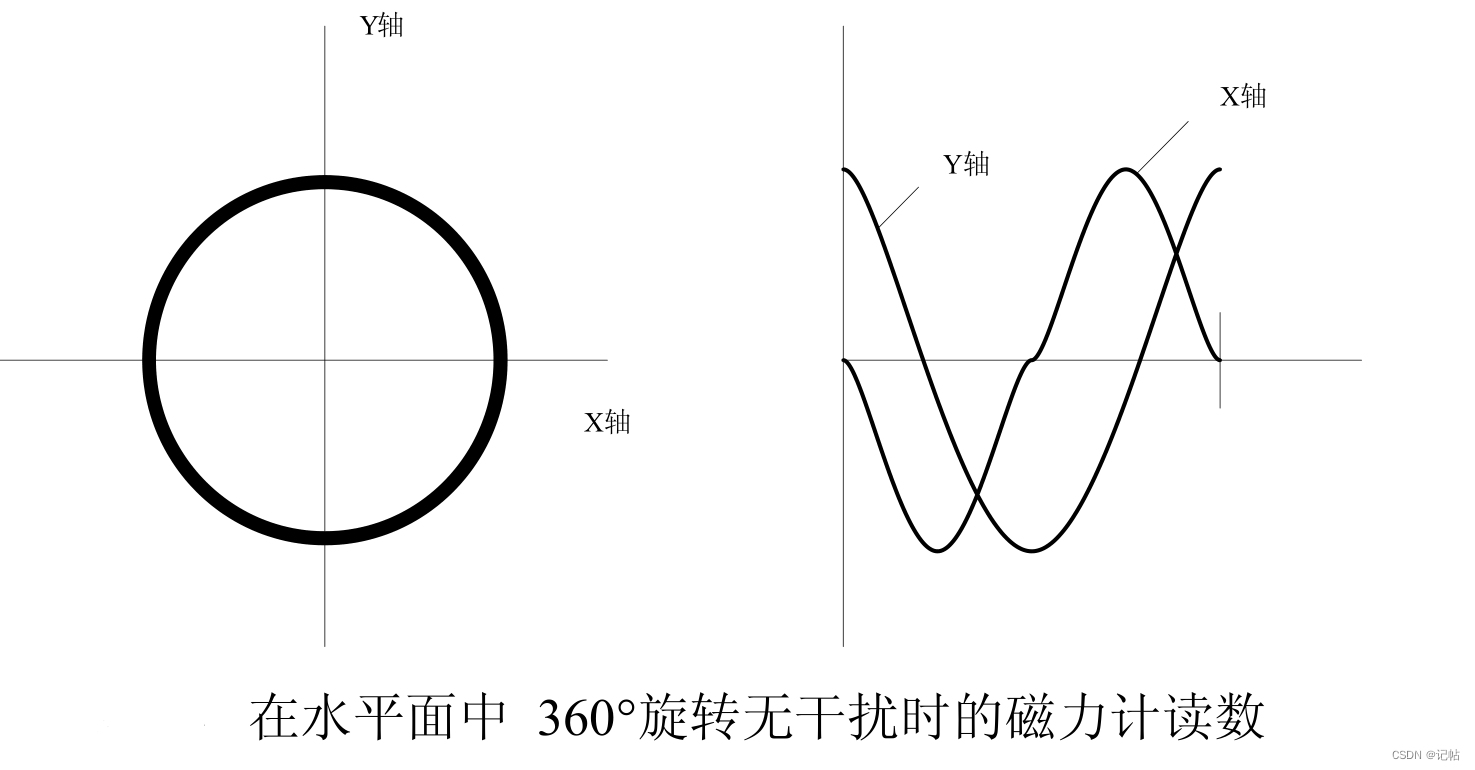
根据 Michal.J.Caruso 的研究,罗盘在理想的没有任何干扰的磁场水平面里作圆形旋转时,磁力计的显示应该呈现上图的状态,其中圆中心在 0,0 点处,每个计数代表 67微高斯,在 X 和 Y 平面中的地球磁场强度值读到 2800 个计数,约为 190 毫高斯,根据下面公式可以对每个读数确定一个方位角。
如果将磁力计安装在有发动机或者其他铁磁材料的环境中,圆形旋转时,磁力计的显示应该下图的状态。
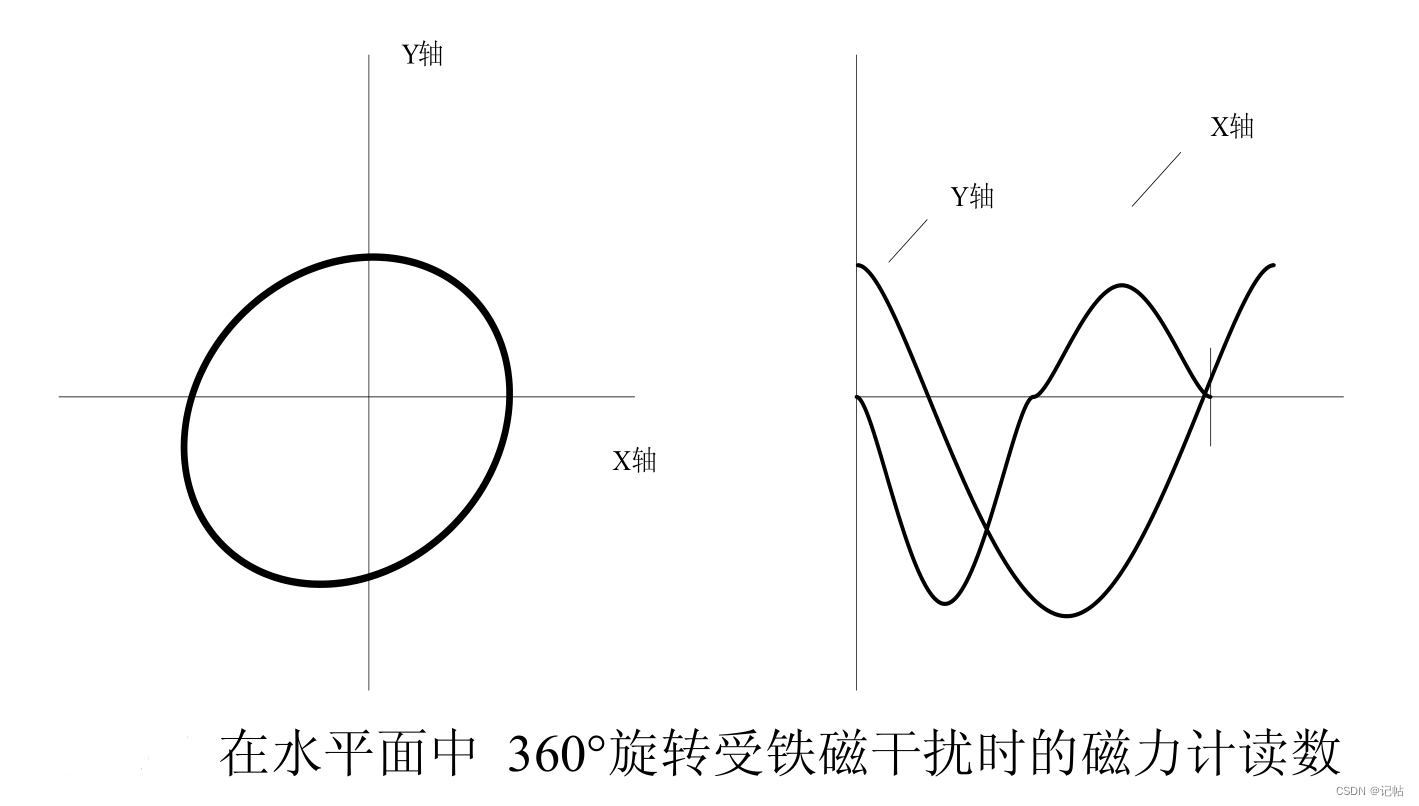
这里的图形不是一个圆 ( 有点椭圆 ) ,而它偏移 0,0 点为 -480 和 -795 个计数,这偏移和椭圆效应是干扰磁场对地球磁场作用的结果。通过确定两个定标因数 Xsf 和 Ysf 可以将椭圆改为圆。随后计算偏移值 Xoff 和 Yoff, 将圆中心定在 0,0 原点,用下面公式来计算 Y,X 值。
X 值 =Xsf×X 读数 +Xoff
Y 值 =Ysf×Y 读数 +Yoff
这里的定标因数 Xsf 和 Ysf 可由下述方法获得。
①将罗盘在水平面做旋转运动
②找出 X 和 Y 读数的最大值和最小值
③用这四个数值确定 X 和 Y 定标因数 (Xsf , Ysf) ,以及零偏移值 (Xoff , Yoff)
Xsf=1 或 (Y 最大 -Y 最小 )/2(X 最大 -Y 最小 )
以较大的数值为准
Ysf=1 或 (X 最大 -Y 最小 )/2(Y 最大 -Y 最小 )
以较大的数值为准
Xoff=[(X 最大 -X 最小 ) /2-X 最大 ]×Xsf
Yoff=[(Y 最大 -Y 最小 ) /2-Y 最大 ]×Ysf
主程序
在主程序中添加开机校准。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
uint8_t reg;
/* Read output only if new value is available */
lis2mdl_mag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read magnetic field data */
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
printf("i=%d,Magnetic field [mG]:%4.2f\t%4.2f\t%4.2f\r\n",i,magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]);
if(i<500)
{
i++;
if(magnetic_mG[0]<Xmin)
Xmin=magnetic_mG[0];
else if(magnetic_mG[0]>Xmax)
Xmax=magnetic_mG[0];
if(magnetic_mG[1]<Ymin)
Ymin=magnetic_mG[1];
else if(magnetic_mG[1]>Ymax)
Ymax=magnetic_mG[1];
if(magnetic_mG[2]<Zmin)
Zmin=magnetic_mG[2];
else if(magnetic_mG[2]>Zmax)
Zmax=magnetic_mG[2];
}
else if(i==500)
{
i++;
Xsf = (Ymax - Ymin) / (Xmax - Xmin);
Ysf = (Xmax - Xmin) / (Ymax - Ymin);
if (Xsf < 1)
Xsf = 1;
if (Ysf < 1)
Ysf = 1;
Xoffset=( (Xmax-Xmin)/2 - Xmax) *Xsf;
Yoffset=( (Ymax-Ymin)/2 - Ymax) *Ysf;
// Zoffset=( (Zmax-Zmin)/2 - Zmax) *Xsf;
}
else
{
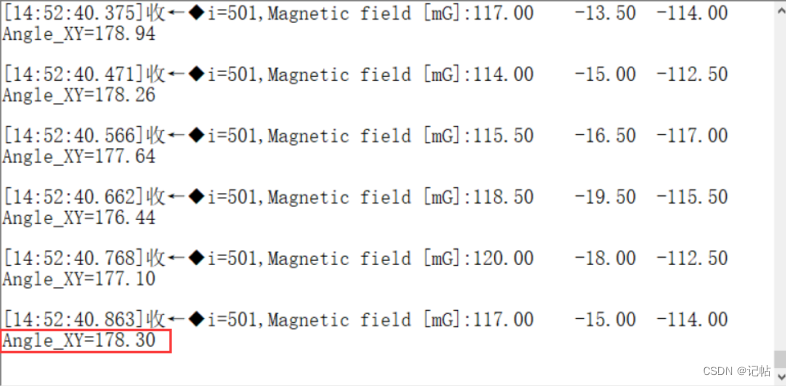
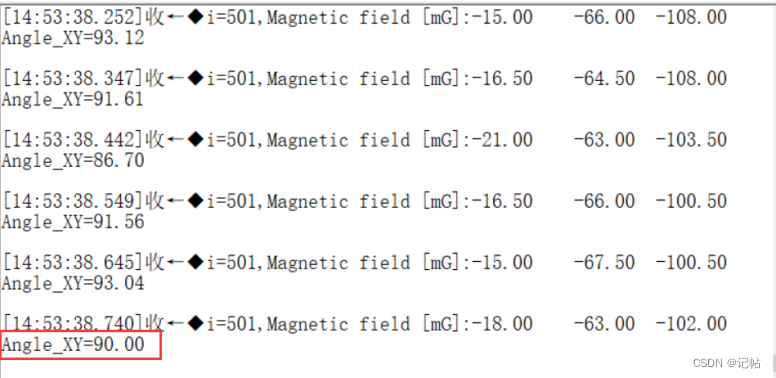
Angle_XY=atan2( (magnetic_mG[1]-Yoffset),(magnetic_mG[0]-Xoffset) ) * (180/3.14159265)+180;//计算角度
printf("Angle_XY=%3.2f\n",Angle_XY);
// Angle_XZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[0]-Xoffset) ) * (180/3.14159265)+180;//计算角度
// Angle_YZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[1]-Yoffset) ) * (180/3.14159265)+180;//计算角度
// printf("Angle_XY=%3.2f,Angle_XZ=%3.2f,Angle_YZ=%3.2f\n",Angle_XY,Angle_XZ,Angle_YZ);
}
}
HAL_Delay(10);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
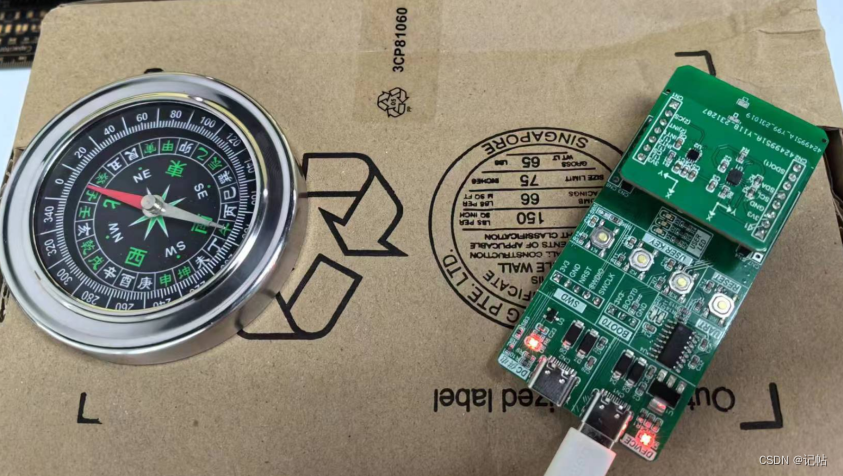
演示

智能推荐
【史上最易懂】马尔科夫链-蒙特卡洛方法:基于马尔科夫链的采样方法,从概率分布中随机抽取样本,从而得到分布的近似_马尔科夫链期望怎么求-程序员宅基地
文章浏览阅读1.3k次,点赞40次,收藏19次。虽然你不能直接计算每个房间的人数,但通过马尔科夫链的蒙特卡洛方法,你可以从任意状态(房间)开始采样,并最终收敛到目标分布(人数分布)。然后,根据一个规则(假设转移概率是基于房间的人数,人数较多的房间具有较高的转移概率),你随机选择一个相邻的房间作为下一个状态。比如在巨大城堡,里面有很多房间,找到每个房间里的人数分布情况(每个房间被访问的次数),但是你不能一次进入所有的房间并计数。但是,当你重复这个过程很多次时,你会发现你更有可能停留在人数更多的房间,而在人数较少的房间停留的次数较少。_马尔科夫链期望怎么求
linux以root登陆命令,su命令和sudo命令,以及限制root用户登录-程序员宅基地
文章浏览阅读3.9k次。一、su命令su命令用于切换当前用户身份到其他用户身份,变更时须输入所要变更的用户帐号与密码。命令su的格式为:su [-] username1、后面可以跟 ‘-‘ 也可以不跟,普通用户su不加username时就是切换到root用户,当然root用户同样可以su到普通用户。 ‘-‘ 这个字符的作用是,加上后会初始化当前用户的各种环境变量。下面看下加‘-’和不加‘-’的区别:root用户切换到普通..._限制su root登陆
精通VC与Matlab联合编程(六)_精通vc和matlab联合编程 六-程序员宅基地
文章浏览阅读1.2k次。精通VC与Matlab联合编程(六)作者:邓科下载源代码浅析VC与MATLAB联合编程浅析VC与MATLAB联合编程浅析VC与MATLAB联合编程浅析VC与MATLAB联合编程浅析VC与MATLAB联合编程 Matlab C/C++函数库是Matlab扩展功能重要的组成部分,包含了大量的用C/C++语言重新编写的Matlab函数,主要包括初等数学函数、线形代数函数、矩阵操作函数、数值计算函数_精通vc和matlab联合编程 六
Asp.Net MVC2中扩展ModelMetadata的DescriptionAttribute。-程序员宅基地
文章浏览阅读128次。在MVC2中默认并没有实现DescriptionAttribute(虽然可以找到这个属性,通过阅读MVC源码,发现并没有实现方法),这很不方便,特别是我们使用EditorForModel的时候,我们需要对字段进行简要的介绍,下面来扩展这个属性。新建类 DescriptionMetadataProvider然后重写DataAnnotationsModelMetadataPro..._asp.net mvc 模型description
领域模型架构 eShopOnWeb项目分析 上-程序员宅基地
文章浏览阅读1.3k次。一.概述 本篇继续探讨web应用架构,讲基于DDD风格下最初的领域模型架构,不同于DDD风格下CQRS架构,二者架构主要区别是领域层的变化。 架构的演变是从领域模型到C..._eshoponweb
Springboot中使用kafka_springboot kafka-程序员宅基地
文章浏览阅读2.6w次,点赞23次,收藏85次。首先说明,本人之前没用过zookeeper、kafka等,尚硅谷十几个小时的教程实在没有耐心看,现在我也不知道分区、副本之类的概念。用kafka只是听说他比RabbitMQ快,我也是昨天晚上刚使用,下文中若有讲错的地方或者我的理解与它的本质有偏差的地方请包涵。此文背景的环境是windows,linux流程也差不多。 官网下载kafka,选择Binary downloads Apache Kafka 解压在D盘下或者什么地方,注意不要放在桌面等绝对路径太长的地方 打开conf_springboot kafka
随便推点
VS2008+水晶报表 发布后可能无法打印的解决办法_水晶报表 不能打印-程序员宅基地
文章浏览阅读1k次。编好水晶报表代码,用的是ActiveX模式,在本机运行,第一次运行提示安装ActiveX控件,安装后,一切正常,能正常打印,但发布到网站那边运行,可能是一闪而过,连提示安装ActiveX控件也没有,甚至相关的功能图标都不能正常显示,再点"打印图标"也是没反应解决方法是: 1.先下载"PrintControl.cab" http://support.businessobjects.c_水晶报表 不能打印
一. UC/OS-Ⅱ简介_ucos-程序员宅基地
文章浏览阅读1.3k次。绝大部分UC/OS-II的源码是用移植性很强的ANSI C写的。也就是说某产品可以只使用很少几个UC/OS-II调用,而另一个产品则使用了几乎所有UC/OS-II的功能,这样可以减少产品中的UC/OS-II所需的存储器空间(RAM和ROM)。UC/OS-II是为嵌入式应用而设计的,这就意味着,只要用户有固化手段(C编译、连接、下载和固化), UC/OS-II可以嵌入到用户的产品中成为产品的一部分。1998年uC/OS-II,目前的版本uC/OS -II V2.61,2.72。1.UC/OS-Ⅱ简介。_ucos
python自动化运维要学什么,python自动化运维项目_运维学python该学些什么-程序员宅基地
文章浏览阅读614次,点赞22次,收藏11次。大家好,本文将围绕python自动化运维需要掌握的技能展开说明,python自动化运维从入门到精通是一个很多人都想弄明白的事情,想搞清楚python自动化运维快速入门 pdf需要先了解以下几个事情。这篇文章主要介绍了一个有趣的事情,具有一定借鉴价值,需要的朋友可以参考下。希望大家阅读完这篇文章后大有收获,下面让小编带着大家一起了解一下。_运维学python该学些什么
解决IISASP调用XmlHTTP出现msxml3.dll (0x80070005) 拒绝访问的错误-程序员宅基地
文章浏览阅读524次。2019独角兽企业重金招聘Python工程师标准>>> ..._hotfix for msxml 4.0 service pack 2 - kb832414
python和易语言的脚本哪门更实用?_易语言还是python适合辅助-程序员宅基地
文章浏览阅读546次。python和易语言的脚本哪门更实用?_易语言还是python适合辅助
redis watch使用场景_详解redis中的锁以及使用场景-程序员宅基地
文章浏览阅读134次。详解redis中的锁以及使用场景,指令,事务,分布式,命令,时间详解redis中的锁以及使用场景易采站长站,站长之家为您整理了详解redis中的锁以及使用场景的相关内容。分布式锁什么是分布式锁?分布式锁是控制分布式系统之间同步访问共享资源的一种方式。为什么要使用分布式锁? 为了保证共享资源的数据一致性。什么场景下使用分布式锁? 数据重要且要保证一致性如何实现分布式锁?主要介绍使用redis来实..._redis setnx watch