A*算法简介-程序员宅基地
技术标签: 自动驾驶 算法 Powered by 金山文档
A*算法是一种启发式的搜索算法, A*算法在某种程度上和广度优先搜索( BFS)、 深度优先搜索( DFS) 类似, 都是按照一定的原则确定如何展开搜索的节点树状结构。 A*可以认为是一种基于“ 优点” 的搜索算法。
搜索区域(The Search Area):
我们假设某人要从 A 点移动到 B 点, 但是这两点之间被一堵墙隔开。 如图 1 ,绿色是 A , 红色是 B , 中间蓝色是墙。

你应该注意到了, 我们把要搜寻的区域划分成了正方形的格子。 这是寻路的第一步, 简化搜索区域。 这个特殊的方法把我们的搜索区域简化为了 2 维数组。数 组 的 每 一 项 代 表 一 个 格 子 , 它 的 状 态 就 是 可 走 (walkalbe) 和 不 可 走(unwalkable)两种。 通过计算出从 A 到 B 需要走过哪些方格, 就找到了路径。 一旦路径找到了, 人物便从一个方格的中心移动到另一个方格的中心, 直至到达目的地。
方格的中心点我们称为“ 节点 (nodes)”。 如果你读过其他关于 A*寻路算法的文章, 你会发现人们常常都在讨论节点。 为什么不直接描述为方格呢? 因为我们有可能把搜索区域划为其他多变形而不是正方形, 例如可以是六边形, 矩形,甚至可以是任意多变形。 而节点可以放在任意多边形里面, 可以放在多变形的中心, 也可以放在多边形的边上。 我们使用这个系统, 因为它最简单。
开始搜索(Starting the Search)
一旦我们把搜寻区域简化为一组可以量化的节点后, 就像上面做的一样, 我们下一步要做的便是查找最短路径。 在 A*中, 我们从起点开始, 检查其相邻的方格, 然后向四周扩展, 直至找到目标。
我们这样开始我们的寻路旅途:
1.从起点 A 开始, 并把它就加入到一个由方格组成的 open list(开放列表)中。 这个 open list 有点像是一个购物单。 当然现在 open list 里只有一项,它就是起点 A , 后面会慢慢加入更多的项。 Open list 里的格子是路径可能会是沿途经过的, 也有可能不经过。 基本上 open list 是一个待检查的方格列表。
2.查看与起点 A 相邻的方格 (忽略其中墙壁所占领的方格, 河流所占领的方格及其他非法地形占领的方格) , 把其中可走的或可到达的方格也加入到open list 中。 把起点 A 设置为这些方格的父亲 (parent node 或 parentsquare) 。 当我们在追踪路径时, 这些父节点的内容是很重要的。 稍后会进行解释。
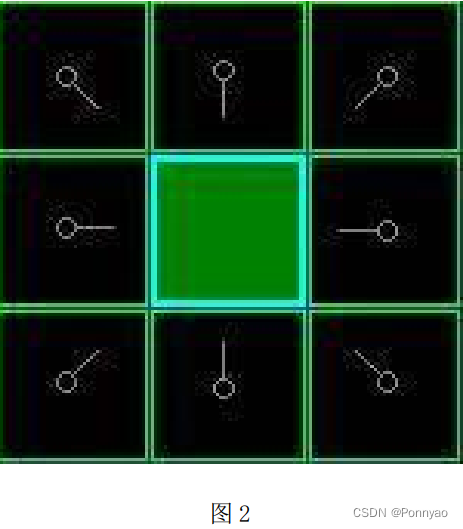
3.把 A 从 open list 中移除, 加入到 close list(封闭列表) 中, closelist 中的每个方格都是现在不需要再关注的。我们看这张图中, 深绿色的方格为起点, 它的外框是亮蓝色, 表示该方格被加入到了 close list。 与它相邻的黑色方格是需要被检查的, 他们的外框是亮绿色。 每个黑方格都有一个灰色的指针指向他们的父节点, 也就是起点 A。
下一步, 我们需要从 open list 中选一个与起点 A 相邻的方格, 按下面描述的一样或多或少的重复前面的步骤。 但是到底选择哪个方格好呢? 具有最小 F值的那个。
路径排序(Path Sorting)
计算出组成路径的方格的关键是下面这个等式:
F = G + H
这里, G 表示从起点 A 移动到指定方格的移动代价, 沿着到达该方格而生成的路径。
H 表示从指定的方格移动到终点 B 的估算成本。
这个通常被称为试探法, 有点让人混淆。 为什么这么叫呢, 因为这是个猜测。直到我们找到了路径我们才会知道真正的距离, 因为途中有各种各样的东西 (比如墙壁, 水等)。 这里将教你一种计算 H 的方法。
我们的路径是这么产生的: 反复遍历 open list, 选择 F 值最小的方格。 这个过程稍后详细描述。 我们还是先看看怎么去计算上面的等式。
就像上面所说的, G 是从起点 A 移动到指定方格的移动代价。 在本例中, 横向和纵向的移动代价为 10, 对角线的移动代价为 14。 之所以使用这些数据, 是因为实际的对角移动距离是 2 的平方根, 或者是近似的 1.414 倍的横向或纵向移动代价。 使用 10 和 14 就是为了简单起见。 比例是对的, 我们避免了开方和小数的计算。 这并不是我们没有这个能力或是不喜欢数学。 使用这些数字也可以使计算机更快。 稍后你便会发现, 如果不使用这些技巧, 寻路算法将很慢。
既然我们是沿着到达指定方格的路径来计算 G 值, 那么计算出该方格的 G值的方法就是找出其父亲的 G 值, 然后按父亲是直线方向还是斜线方向加上 10或 14。 随着我们离开起点而得到更多的方格, 这个方法会变得更加明朗。
有很多方法可以估算 H 值。 这里我们使用 Manhattan 方法, 计算从当前方格横向或纵向移动到达目标所经过的方格数, 忽略对角移动, 然后把总数乘以10 。 之所以叫做 Manhattan 方法, 是因为这很像统计从一个地点到另一个地点所穿过的街区数, 而你不能斜向穿过街区。 重要的是, 计算 H 时, 要忽略路径中的障碍物。 这是对剩余距离的估算值, 而不是实际值, 因此才称为试探法。
把 G 和 H 相加便得到 F 。 我们第一步的结果就是图片上所示的。 每个方格都标上了 F,G,H 的值, 就像起点右边的方格那样, 左上角是 F , 左下角是 G ,右下角是 H 。
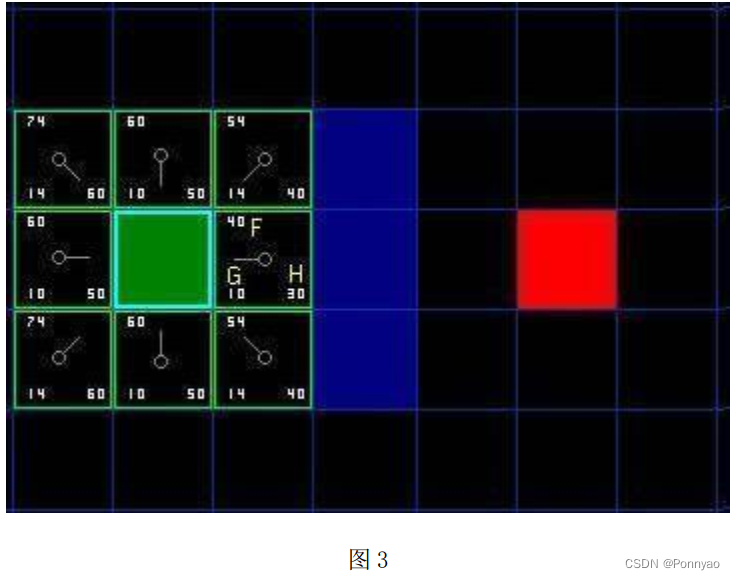
好, 现在让我们看看其中的一些方格。 在标有字母的方格, G = 10 。 这是因为水平方向从起点到那里只有一个方格的距离。 与起点直接相邻的上方, 下方,左方的方格的 G 值都是 10 , 对角线的方格 G 值都是 14 。
H 值通过估算起点于终点 ( 红色方格 ) 的 Manhattan 距离得到, 仅作横向和纵向移动, 并且忽略沿途的墙壁。 使用这种方式, 起点右边的方格到终点有3 个方格的距离, 因此 H = 30。 这个方格上方的方格到终点有 4 个方格的距离( 注意只计算横向和纵向距离 ) , 因此 H = 40。 对于其他的方格, 你可以用同样的方法知道 H 值是如何得来的。
每个方格的 F 值, 再说一次, 直接把 G 值和 H 值相加就可以了。
继续搜索(Continuing the Search)
为了继续搜索, 我们从 open list 中选择 F 值最小的 ( 方格 ) 节点, 然后对所选择的方格这样操作:
1.把它从 open list 里取出, 放到 close list 中。
2. 检 查 所 有 与 它 相 邻 的 方 格 , 忽 略 其 中 close list 中 或 是 不 可 走(unwalkable) 的方格 (比如墙, 水, 或是其他非法地形), 如果方格不在 open lsit 中, 则把它们加入到 open list 中。把我们选定的方格设置为这些新加入的方格的父亲。
3.如果某个相邻的方格已经在 open list 中, 则检查这条路径是否更优, 也就是说经由当前方格(我们选中的方格)到达那个方格是否具有更小的 G 值。 如果没有, 不做任何操作。相反, 如果 G 值更小, 则把那个方格的父亲设为当前方格 ( 我们选中的方格 ) , 然后重新计算那个方格的 F 值和 G 值。 如果你还是很混淆, 请参考下图。
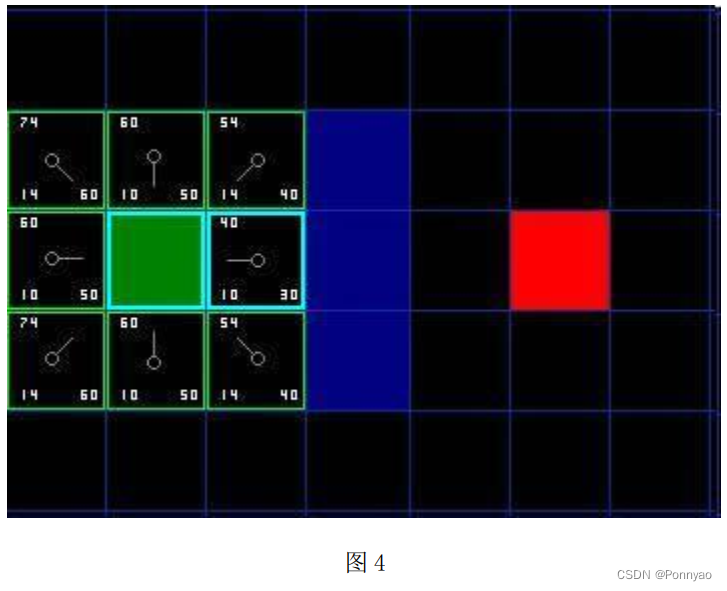
让我们看看它是怎么工作的。 在我们最初的 9 个方格中, 还有 8 个在 open list 中, 起点被放入了 close list 中。 在这些方格中, 起点右边的格子的 F 值40 最小, 因此我们选择这个方格作为下一个要处理的方格。 它的外框用蓝线打亮。
首先, 我们把它从 open list 移到 close list 中 (这也就是为什么用蓝线打亮的原因)。 然后我们检查与它相邻的方格。 它右边的方格是墙壁, 我们忽略。它左边的方格是起点, 在 close list 中, 我们也忽略。 其他 4 个相邻的方格均在 open list 中, 我们需要检查经由这个方格到达那里的路径是否更好, 使用 G值来判定。 让我们看看上面的方格。 它现在的 G 值为 14。 如果我们经由当前方格到达那里, G 值将会为 20(其中 10 为到达当前方格的 G 值, 此外还要加上从当前方格纵向移动到上面方格的 G 值10)。 显然 20 比 14 大, 因此这不是最优的路径。 如果你看图你就会明白。 直接从起点沿对角线移动到那个方格比先横向移动再纵向移动要好。
当把 4 个已经在 open list 中的相邻方格都检查后, 没有发现经由当前方格更好的路径, 因此我们不做任何改变。 现在我们已经检查了当前方格的所有相邻的方格, 并也对他们作了处理, 是时候选择下一个待处理的方格了。
因此再次遍历我们的 open list, 现在它只有 7 个方格了, 我们需要选择 F值最小的那个。 有趣的是, 这次有两个方格的 F 值都是 54, 选哪个呢? 。 从速度上考虑, 选择最后加入 open list 的方格更快。 这导致了在寻路过程中, 当靠近目标时, 优先使用新找到的方格的偏好。 但是这并不重要。 (对相同数据的不同对待, 导致两中版本的 A*找到等长的不同路径 )。
我们选择起点右下方的方格, 如下图所示。

这次, 当我们检查相邻的方格时, 我们发现它右边的方格是墙, 忽略它。 上面的也一样。
我们把墙下面的一格也忽略掉。 为什么? 因为如果不穿越墙角, 你不能直接从当前方格移动到那个方格。 你需要先往下走, 然后再移动到那个方格, 这样来绕过墙角。 (注意: 穿越墙角的规则是可以选择的, 依赖于你的节点是怎么放置的)
这样还剩下 5 个相邻的方格。当前方格下面的 2 个方格还没有加入 open list,所以把它们加入, 同时把当前方格设为他们的父亲。 在剩下的 3 个方格中, 有 2个已经在 close list 中 (其中一个是起点, 一个是当前方格上面的方格, 外框被加亮的), 我们忽略它们。 最后一个方格, 也就是当前方格左边的方格, 我们检查经由当前方格到达那里是否具有更小的 G 值, 结果是没有, 因此我们准备从open list 中选择下一个待处理的方格。
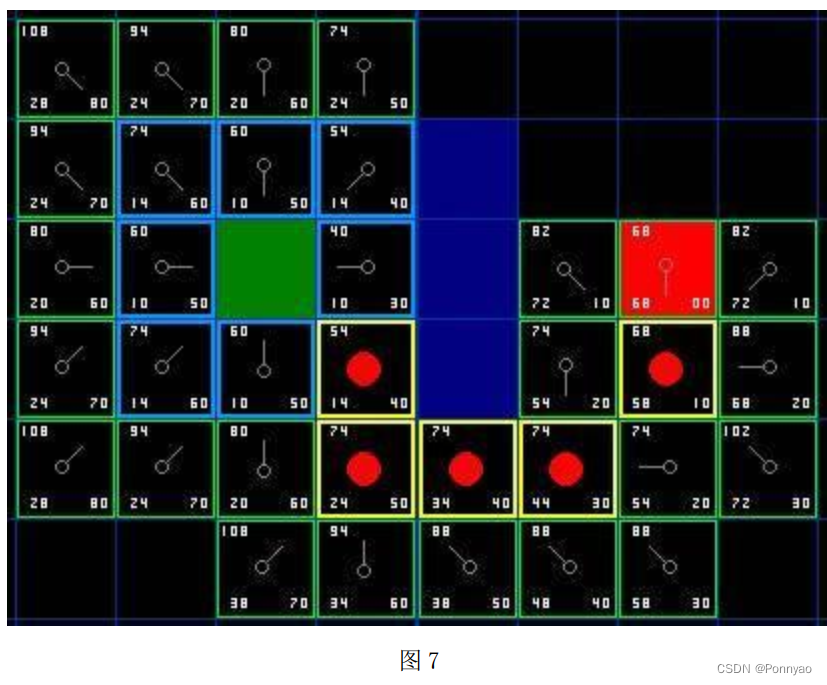
不断重复这个过程, 直到把终点也加入到了 open list 中, 此时如下图所示。

注意, 在起点下面 2 格的方格的父亲已经与前面不同了。 之前它的 G 值是28, 并且指向它右上方的方格。 现在它的 G 值为 20, 并且指向它正上方的方格。这在寻路过程中的某处发生, 使用新路径时 G 值经过检查并且变得更低, 因此父节点被重新设置, G 值和 F 值被重新计算。 尽管这一变化在本例中并不重要, 但是在很多场合中, 这种变化会导致寻路结果的巨大变化。
那么我们怎么样去确定实际路径呢? 很简单, 从终点开始, 按着箭头向父节点移动, 这样你就被带回到了起点, 这就是你的路径。 就像这张图里, 从起点 A移动到终点 B 就是简单从路径上的一个方格的中心移动到另一个方格的中心, 直至目标。 就是这么简单!
智能推荐
架构师之路:从码农到架构师你差了哪些_web架构师-程序员宅基地
文章浏览阅读1w次,点赞14次,收藏56次。转载自 架构师之路:从码农到架构师你差了哪些 Web应用,最常见的研发语言是Java和PHP。 后端服务,最常见的研发语言是Java和C/C++。 大数据,最常见的研发语言是Java和Python。 可以说,Java是现阶段中国互联网公司中,覆盖度最广的研发语言,掌握了Java技术体系,不管在成熟的大公司,快速发展的公司,还是创业阶段的公司,都能有立足之地。有..._web架构师
js sort排序_sort a<b-程序员宅基地
文章浏览阅读103次。/* 排序 >号 从小到大排序 <从大到小排序 */ list.sort(function(a, b) { return a.date < b.date ? 1 : -1; })如果是简单的list就直接 return a < b ? 1 : -1;即可,如果是list里面套的map,可让list按map里面的指定字段进行排揎。..._sort a
前端设置条件限制form表单提交到后端解决方案_jsp前端页面将表单是否提交成功作为限制条件-程序员宅基地
文章浏览阅读375次。<script src="js/jquery-1.8.3.min.js" type="text/javascript"></script> <script type="text/javascript"> function checkName() { var name = document.getElementB..._jsp前端页面将表单是否提交成功作为限制条件
计算机网络sequence number,TCP协议中SequenceNumber和Ack Numbe-程序员宅基地
文章浏览阅读1k次。Sequence Numberlzyws7393074532892018-04-25Number Sequenceqq_391789932452017-09-21理解TCP序列号(Sequence Number)和确认号(Acknowledgment Number)hebbely9822017-01-14Number Sequence(规律)l25336363712902017-07-18Numb..._ack num
计算机系统启动项设置密码,电脑开机第一道密码怎么设置 - 卡饭网-程序员宅基地
文章浏览阅读5.9k次。笔记本电脑怎么进CMOS密码巧设置笔记本电脑怎么进CMOS密码巧设置 笔记本电脑为了保护用户的数据安全,往往采用加密的方式,最常见的还是CMOS密码加密技术。为了让你的重要数据更加安全,你可能需要设置不同的密码,这也就要求你记住许多密码。对于笔记本电脑用户来说,真的需要设置一道道密码关卡吗?非也非也! 一、认识与设置笔记本电脑的CMOS密码 笔记本电脑的CMOS密码大致分为超级密码(Supervi..._电脑第一道密码修改
VulnHub靶机-Jangow: 1.0.1_jangow01-程序员宅基地
文章浏览阅读2.5k次,点赞2次,收藏5次。迟到的文章,就当库存发出来吧~_jangow01
随便推点
基于Unity3D的相机功能的实现(六)—— 上帝视角(王者荣耀视角)_unity overlook-程序员宅基地
文章浏览阅读4k次,点赞2次,收藏15次。在MOBA游戏中,上帝视角是一个很实用的功能。_unity overlook
用mac的chrome浏览器调试Android手机的网页-程序员宅基地
文章浏览阅读2.5k次,点赞2次,收藏2次。一、参考链接read chrome remote debugging documentation调出开发者选项二、设置android在安卓4.2及更新的版本中,默认情况下,【开发者选项】是隐藏的。要启用【开发者选项】,设置 -> 关于手机 -> 版本号,对着版本号点击7次。设置 -> 开发者选项 -> USB调试三、连接手机和电脑..._小米13链接mac chrome inspect
树莓派GPIO简单操作_树莓派怎么读取gpio口上的信息-程序员宅基地
文章浏览阅读637次。树莓派的GPIO操作被抽象为文件读写,下面以一个例子来说明GPIO操作。_树莓派怎么读取gpio口上的信息
【汽车电子】浅谈车载系统QNX_车机qnx虚拟化软件系统架构-程序员宅基地
文章浏览阅读1.7k次。QNX是一种商用的遵从POSIX规范的类Unix实时操作系统,目标市场主要是面向嵌入式系统。它可能是最成功的微内核操作系统之一。QNX是一种商用的类Unix实时操作系统,遵从POSⅨ规范,目标市场主要是嵌入式系统[1]。QNX成立于1980年,是加拿大一家知名的嵌入式系统开发商。QNX的应用范围极广,包含了:控制保时捷跑车的音乐和媒体功能、核电站和美国陆军无人驾驶Crusher坦克的控制系统[2],还有RIM公司的BlackBerry PlayBook平板电脑。_车机qnx虚拟化软件系统架构
信号发生器设计VHDL代码Quartus仿真_vhdl正弦波信号发生器-程序员宅基地
文章浏览阅读1k次,点赞20次,收藏22次。代码功能:信号发生器设计信号发生器由波形选择开关控制波形的输出,分别能输出正弦波、方汉和三角波三种波形,波形的周期为2秒(由40M有源晶振分频控制)。考虑程序的容量,每种波形在一个周期内均取16个取样点,每个样点数据是8位(数值范围:00000000~1111111)要求将D/A变换前的8位二进数据(以十进制方式)输出到数码管动态演示出来。_vhdl正弦波信号发生器
笔记-Java线程概述_java 线程概述-程序员宅基地
文章浏览阅读629次。Java Concurrency in Practice中对线程安全的定义:当多个线程访问一个类时,如果不用考虑这些线程在运行时环境下的调度和交替运行,并且不需要额外的同步及在调用方代码不必做其他的协调,这个类的行为仍然是正确的,那么这个类就是线程安全的。显然只有资源竞争时才会导致线程不安全,因此无状态对象永远是线程安全的 。过多的同步会产生死锁的问题,死锁属于程序运行的时_java 线程概述