ROS2学习笔记2--介绍小乌龟教程和rqt_ros2创建多只小乌龟-程序员宅基地
技术标签: ROS2
概要:这篇主要介绍小乌龟教程和rqt
环境:ubuntu20.04,ros2-foxy,vscode
2.1.2介绍小乌龟教程和rqt(原文:https://docs.ros.org/en/foxy/Tutorials/Turtlesim/Introducing-Turtlesim.html)
>>教程>>介绍小乌龟教程和rqt
你正阅读的是ros2较老版本(Foxy),但仍然支持的说明文档.想查看最新版本的信息,请看galactic版本链接( https://docs.ros.org/en/galactic/Tutorials.html)
介绍小乌龟教程和rqt
目标:安装和使用小乌龟包以及rqt工具,为接下来教程做好准备
课程等级:初级
时长:15min
目录
1.背景
2.预备知识
3.步骤
3.1安装小乌龟包turtlesim
3.2打开小乌龟
3.3使用小乌龟
3.4安装rqt
3.5使用rqt
3.6重映射(多个小乌龟)
3.7关闭小乌龟
4.总结
5.下一步
6.相关内容
1.背景
小乌龟是学习ros2轻量级仿真工具.其可说明ros2绝大部分基础功能,可告诉你接下来在一个真实机器人或者仿真机器人(运行ros2)能做什么有一个基本的认识.
rqt是ros2的一个gui工具. 所做的工作内容可通过rqt命令行实现,但是其只提供一个更简单,更人性化方式去操作ros2.
这节课涉及ros2一些核心概念,例如节点的分离,话题和服务.所有的概念会在后续课程详细展开;这节课,你会简单设置一个这些工具,初步认识上述这些概念.
2.预备知识
之前的配置ros2环境课程(https://docs.ros.org/en/foxy/Tutorials/Configuring-ROS2-Environment.html),教你如何配置你的环境.
3.步骤
3.1安装小乌龟包turtlesim
老规矩,首先在新打开终端source一下配置文件(环境变量),正如上节课所说的.
根据ros2版本(本教程安装的是foxy版本),安装相应的小乌龟仿真包
linux:
sudo apt update
sudo apt install ros-foxy-turtlesim
检查该安装包:
ros2 pkg executables turtlesim
上面的指令会返回小乌龟仿真包可执行文件列表:
turtlesim draw_square
turtlesim mimic
turtlesim turtle_teleop_key
turtlesim turtlesim_node
3.2打开小乌龟
终端输入如下指令,启动小乌龟仿真:
ros2 run turtlesim turtlesim_node
仿真窗口中间应该有一个乱爬的小乌龟
在输入指令的终端,可以看见来自节点如下信息:
[INFO] [turtlesim]: Starting turtlesim with node name /turtlesim
[INFO] [turtlesim]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
这里,你会发现默认小乌龟名字是turtle1,以及默认(小乌龟)出现坐标位置
3.3使用小乌龟
新开一个终端并source一次ros2环境变量(个人看法,如果在启动脚本有写ros2环境变量了,没必要再source了)
现在,你启动第一个并且是新的节点去控制小乌龟:
ros2 run turtlesim turtle_teleop_key
此时,你有三个窗口是打开运行的:一个终端窗口运行turtlesim_node,一个终端窗口运行turtle_teleop_key 和小乌龟仿真窗口.安排好三个窗口才方便看小乌龟仿真窗口,同时也保证运行turtle_teleop_key终端窗口处于活动状态(也就是把光标单击该终端窗口,并保持在其内部)才能控制小乌龟仿真运动.
使用指定的键盘字母控制小乌龟,它可以在窗口内移动,使用它自带的笔绘制出所经过的轨迹.
注意:
按一下指定的字母仅会让小乌龟移动一小段距离然后就停止.这是由于,实际上,你总不能让机器人持续执行一个指令,例如,控制台跟机器人断开链接情况.
你可以通过下面这些指令来查看这些节点涉及的相关的服务,话题和动作:
ros2 node list
ros2 topic list
ros2 service list
ros2 action list
你将会在接下来的课程学习这些概念,由于本课程的目标只是让你有初步的认识.我们使用rqt(一种ros2图形化界面)去稍微看看服务内容
3.4安装rqt
打开一个新的终端安装rqt和相关的插件:
linux-ubuntu20.04:
sudo apt update
sudo apt install ~nros-foxy-rqt*
运行rqt:
rqt
3.5使用rqt
第一次启动rqt,窗口会变黑(个人表示没有碰到).不用担心,依次从菜单选择Plugins > Services > Service Caller 就会调用服务出来.
注意:
rqt找到插件可能会化一些时间,如果选择了plugins,但没有看见services或者其他反应,你可以关闭rqt,在终端输入rqt --force-discover指令.
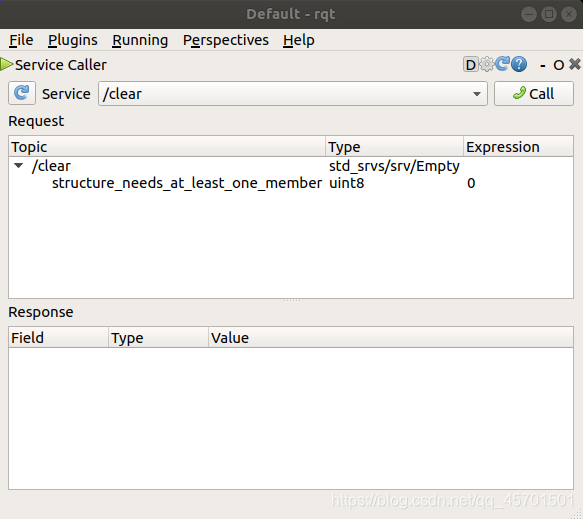
点击一个service左侧的更新按钮,保证仿真小乌龟节点服务都可以在下拉列表中找到
单击service下拉列表,选择/spawn服务
3.5.1试试spawn服务
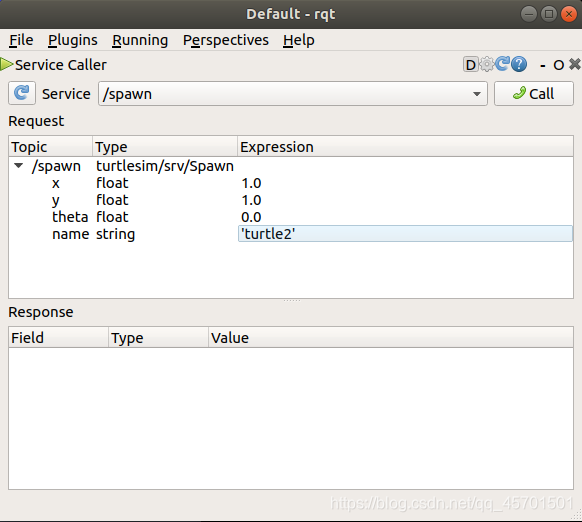
让我们使用rqt的/spawn服务,你可以从它的名字猜到其会创建另外一个乌龟到小乌龟仿真窗口中.
单击Expression列名字行的单引号位置,输入新乌龟的新名字,如turtle2.你会发现expression列对应的名字参数是string类型.
输入新乌龟的生成的坐标位置,如x = 1.0和 y = 1.0
注意:如果你生成一个新乌龟,名字也与已存在的乌龟相同,默认老乌龟turtle1,运行turtlesim_node时,你会如下报错信息:
[ERROR] [turtlesim]: A turtle named [turtle1] already exists
为了生成turtle2, 你需要单击rqt窗口顶部右侧Call按钮以启动service服务
你会发现一个新乌龟(再次随机设计的)出现在你所定义的坐标位置.
如果你更新service列表,你会发现现在有新的服务关联到新乌龟,除了/turtle1/…之外还有/turtle2/…
3.5.2试试set_pen服务
现在通过/set_pen服务给turtle1设计一个画笔
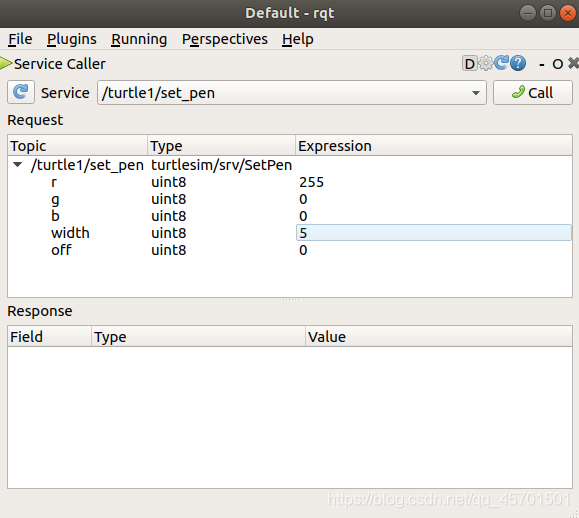
r,g和b的数值在0到255之间,设置的是乌龟笔的绘制颜色,并且width设置的是线的粗细
设置r值为255,width值为5,乌龟绘制的线就是红色的.更新数据后,别忘了单击call来启动新的服务.
如果你返回正在运行turtle_teleop_node节点的终端,单击按键,你会发现乌龟1的画笔已发生变化
你已经可能注意到乌龟2没有办法去移动乌龟2.你可以通过映射乌龟1的cmd_vel话题到乌龟2上来完成这件事情
3.6重映射(多个小乌龟)
在新的终端中,source一下ros2,并且输入如下指令:
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel
现在你可以在终端窗口激活状态下移动乌龟2了,并且另一终端正在运行乌龟1的turtle_teleop_key也处于激活状态

3.7关闭小乌龟
在运行turtlesim_node终端键盘输入"ctrl+c"结束仿真,同时在 teleop 终端输入q退出
4.总结
使用小乌龟仿真和rqt是一个学习ros2核心概念的一个很好方式
5.下一步
既然你已经知道小乌龟仿真和rqt的启动与运行,并且对它们如何工作有了初步了解.下一节课,开始第一个ros2核心概念学习,理解ros2节点.
6.相关内容
这个小乌龟仿真包可以在 ros_tutorials repo(https://github.com/ros/ros_tutorials/tree/foxy-devel/turtlesim)找到
社区贡献的视频演示了本教程所涉及的许多内容.
其他
个人实际运行发现问题:
1)一个乌龟时,控制运动时,发现乌龟只能转动,而不能直线移动;
2)两个乌龟时,映射运动指令输入,都是控制到乌龟1(在乌龟2控制终端输入运动指令,乌龟1偶尔会转动并不像乌龟1控制终端控制乌龟1,一定会动的),并且都只是转动,而不能移动.乌龟2并没有任何运动.
题外话:
这课程是在等毕业证那十几天搞的,室友问,现在在线翻译这么强大,为啥还在这里瞎折腾呢?我说,我的目地是好好认真看一下,了解一下,自己折腾,目前是我想到最好的办法来获得最佳效果,即使这翻译有点别扭,哈哈哈.
#####################
不积硅步,无以至千里
好记性不如烂笔头
感觉有点收获的话,麻烦大大们点赞收藏哈
智能推荐
Redis——Linux下安装以及命令操作_redis add命令-程序员宅基地
文章浏览阅读553次。Redis(Remote Dictionary Server ),即远程字典服务是一个开源的使用ANSIC语言编写、支持网络、可基于内存亦可持久化的日志型、Key-Value数据库,并提供多种语言的API。是一款高性能的NOSQL系列的非关系型数据库_redis add命令
MSP430用按键中断控制定时器产生持续 1s 的周期信号_msp430g2553设置一个1秒的定时器-程序员宅基地
文章浏览阅读5.1k次。//////////////////////////////////////////////////////////////////////////////////////////////////////// 2012 年吉林省大学生电子设计大赛 C题> ----(声源部分)// 要求: 有信号产生电路, 放大电路, 声音频率 800Hz 左右, 按一次键响声持续 1 秒.//_msp430g2553设置一个1秒的定时器
计算机二级c语言停考之后,计算机等级考试今年起作重大调整 二级取消DOS-程序员宅基地
文章浏览阅读435次。2005年,全国计算机等级考试一级增加一级WPSOffice,二级取消三个科目,新增加三个科目,二级上机考试中取消对DOS部分的考核,新增科目将于2005年上半年在全国正式推广。记者昨天从教育部考试中心获悉,全国计算机等级考试今年开始进行重大调整,考试内容和考试方式上均有较大的变化。一级考试开考科目名称调整为:一级MSOffice(原称一级)、一级B,新增加一级WPSOffice。取消一级科目的纸..._为什么现在计算机c语言程序设计二级不分等级了吗?
SimpleHotUpdate使用技巧(UE5智能热更新插件)_ue5 打补丁-程序员宅基地
文章浏览阅读2k次。作者:人宅目录简介目前支持的功能1.界面认识1.1 加载SimpleHotUpdate插件1.2 OSS服务器配置1.3 热更新的服务器文件路径1.4 客户端热更后的安装补丁设置1.5 主版本和额外版本1.6 版本号1,7 关于打包的设置描述1.8 RSA加密1-9 菜单配置表按钮介绍1-10 HTTP服务器界面认识1-11 配置HTTP服务器的服务器1-12 HTTP服务器脚本2 上传补丁和加载补丁方法。2.1 补丁上传2.2 客户端安装策略2.3 生..._ue5 打补丁
微信小程序之 带参数跳转页面实例(传参及接收参数)_小程序页面传参案例,小松菜-程序员宅基地
文章浏览阅读1w次,点赞10次,收藏21次。带参数跳转页面目的:实现页面A带参跳转页面B,并在页面B中获取到相应的参数A页面--------获取id、name值并跳转页面// demo.jsgotoB() { let project_id = e.target.dataset.id; let project_name = this.data.userName; wx.navigateTo({ url: './add/add?id=' + project_id + '&name=' + project__小程序页面传参案例,小松菜
GEE随记(五):研究区平均温度变化曲线_gee中进行温度的趋势分析-程序员宅基地
文章浏览阅读496次。GEE生成研究区域一年内平均温度变化图_gee中进行温度的趋势分析
随便推点
「进击 Redis」二十六、你竟然还不知道 hash slot-程序员宅基地
文章浏览阅读242次。前言Redis 系列第二十七篇,也是Cluster 集群模式第二篇。 上篇我们已经通过画图与对比的方式将Cluster 虚拟槽寻址思路、取余hash和一致性hash寻址的原理弄清楚了,还有不熟悉的好哥哥可以看你竟然还不知道 hash slot 这篇了解一下。这一篇的话主要是对Cluster 集群的搭建与使用,上一篇又说到分成两篇的,想想篇幅还是不要那么长,于是乎就有了一篇。这一篇的话基本上都是一些实践性的内容,好哥哥们还是一样不要偷懒哦。有杠精好哥哥会说了,怎么哨兵模式的搭建你怎么不弄?有这么杠的好哥哥_hash slot
AI绘画Midjourney的咒语关键词汇总结_ai咒语词典-程序员宅基地
文章浏览阅读7.6k次,点赞6次,收藏37次。一个爱冒险的8岁可爱男孩,他喜欢探索和了解世界,在森林里,皮克斯动画风格,C4D,OC渲染器半身像镜头,黏土雕塑材质,电影照明,高质量,多细节,高清。_ai咒语词典
Listview使用-程序员宅基地
文章浏览阅读63次。ListView控件比前面几种控件要复杂一些,通过此控件,可将项目组成带有或不带有列标头的列,并显示伴随的图标和文本。ListView控件是由ColumnHeader和ListItem对象所组成的,其中ColumnHeader对象的个数决定了控件的列数,而ListItem对象的个数则决定了控件的行数。(图7) ColumnHeader对象是ListView控件中包含标头文字的项目。利用Colum..._tooltip1和listview中columnheader使用
远程管理服务器的时候反应特别慢_远程资源管理器速度慢-程序员宅基地
文章浏览阅读3.3k次。问题:远程管理服务器的时候反应特别慢,在命令行敲命令的时候很长时间才在终端显示出来怀疑原因:1、查看远程服务器CPU负载情况、内存使用情况、磁盘IO等系统资源使用情况,可以使用sar、uptime、top、iostat、vmstat等2、查看网络是否稳定,使用 ping 查看是否丢包严重..._远程资源管理器速度慢
C语言实现三次样条插值_typedef struct tagpoint // 插值点的结构体成员有x, y { double-程序员宅基地
文章浏览阅读2k次,点赞2次,收藏13次。#include <stdio.h># define MAX_N 20 // 定义(x_i,y_i)的最大的维数 typedef struct tagPOINT // 点的结构 { double x; double y;} POINT; int main ( ) { int n; int i, k; POINT points[MAX_N + 1]; double h[MAX_N + 1], b[MAX_N + 1], c[_typedef struct tagpoint // 插值点的结构体成员有x, y { double x; double y; }
Python基础——常用操作符_≥是操作符吗-程序员宅基地
文章浏览阅读1.4k次。文章目录算数操作符算数操作符Python的算数操作符大部分和我们理解的一样,但尤其要注意一些特别的操作符。一般常用的操作符有:+−∗/%∗∗// +\quad -\quad *\quad /\quad \%\quad **\quad //\quad+−∗/%∗∗//前四个不用过多介绍了,加减乘除。此外,Python和其他大多数编程语言一样,可以简化写法。例如:a = a+1 可以写成 a += 1 等。..._≥是操作符吗