【ART-Pi与RT-Thread入门】⑤ART-Pi配置PWM设备(避坑指南,已验证)-程序员宅基地
技术标签: art-pi # RT-Thread PWM RT-Thread Studio
文章目录
开发环境
芯片:STM32H750XBH6
开发板:ART-Pi
RT-Thread Studio: V2.0.0
RT-Thread版本:V4.0.3
STM32 CubeMX: V6.1.1
创建项目
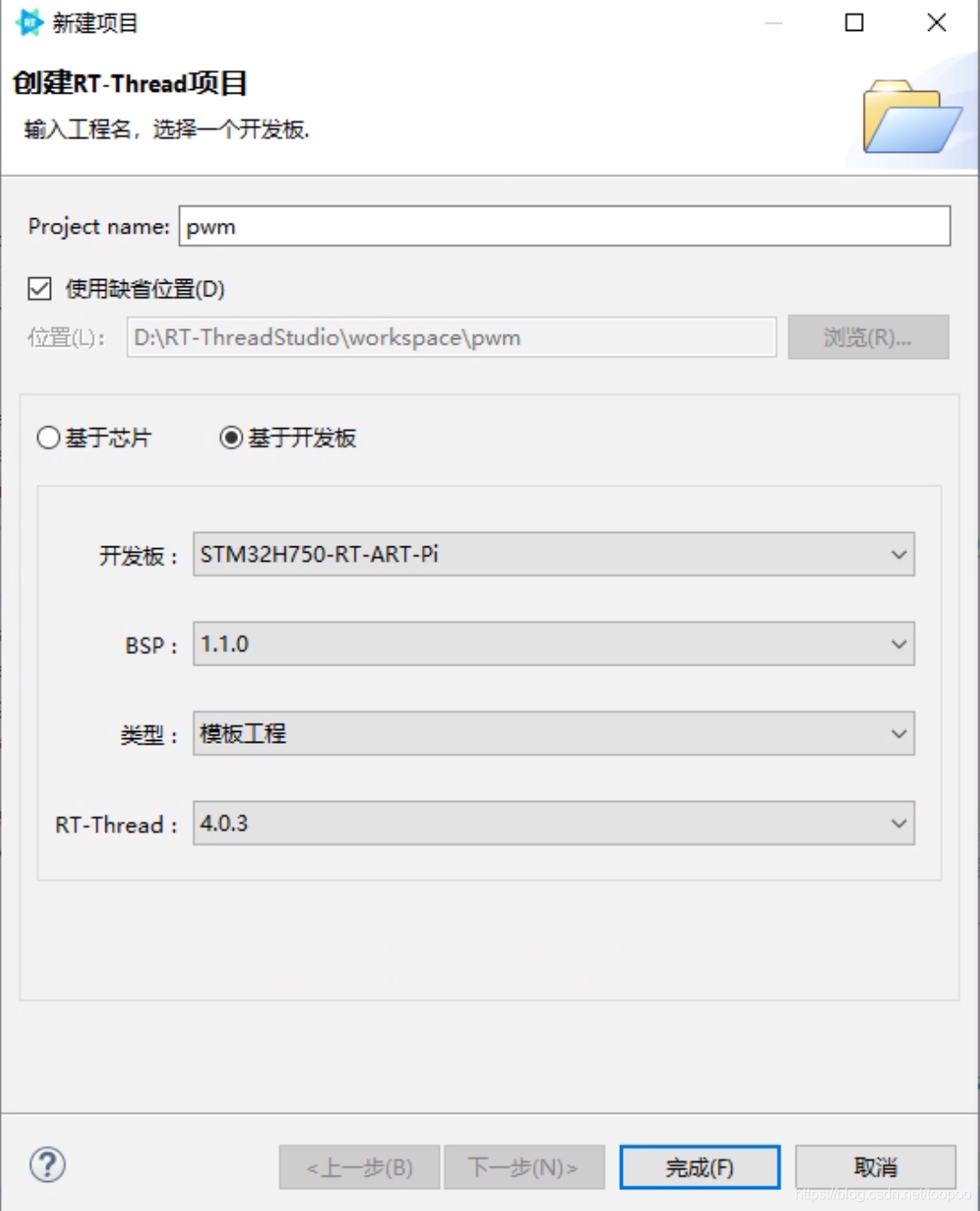
RT-Thread Studio中点击菜单 文件-新建-RT-Thread项目,选择基于ART-Pi 开发板的模板工程。
步骤1:RT-Thread Studio项目设置
在设置中启用HWTIMER和PWM设备驱动。
双击项目的RT-Thread Setting,点击右侧箭头
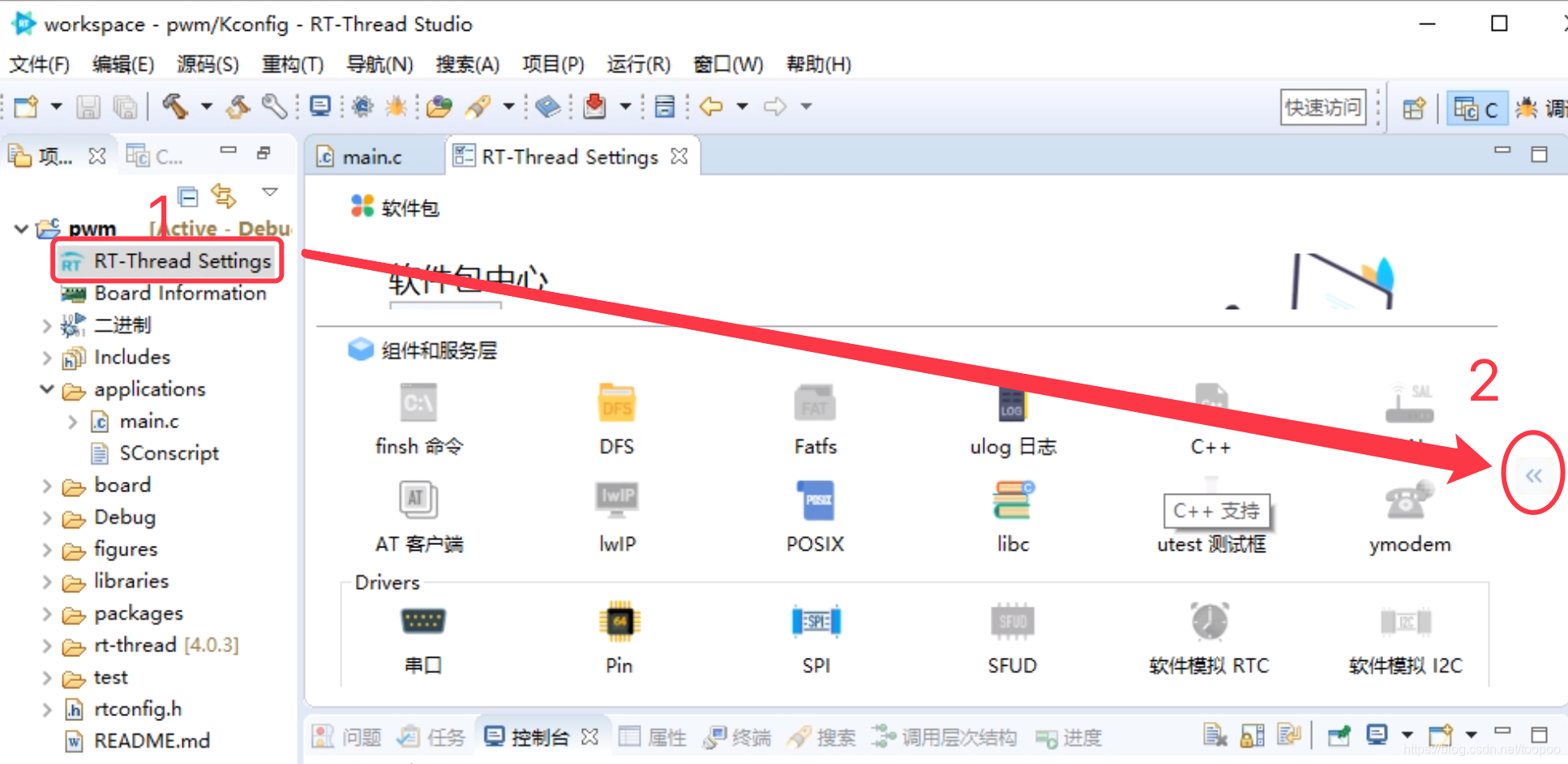
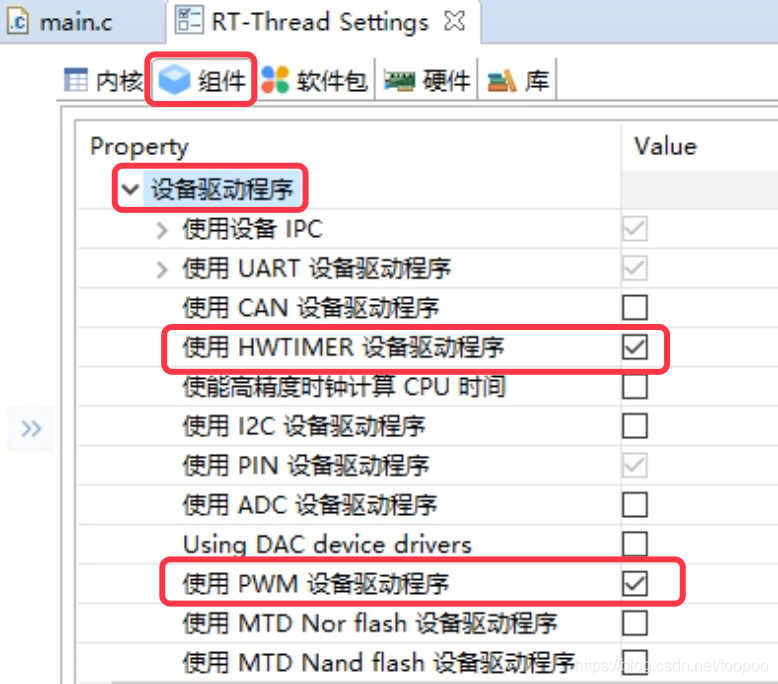
在组件-设备驱动程序中,打开使用HWTIMER设备驱动程序和使用PWM设备驱动程序。
此时我们看到\board\CubeMX_Config\Core\Inc\stm32h7xx_hal_conf.h文件中,
已经启用了两个宏定义:
#define HAL_TIM_MODULE_ENABLED
和
#define HAL_PWR_MODULE_ENABLED
如未启用,请手动取消这两行的注释。
步骤2:打开board.h宏定义
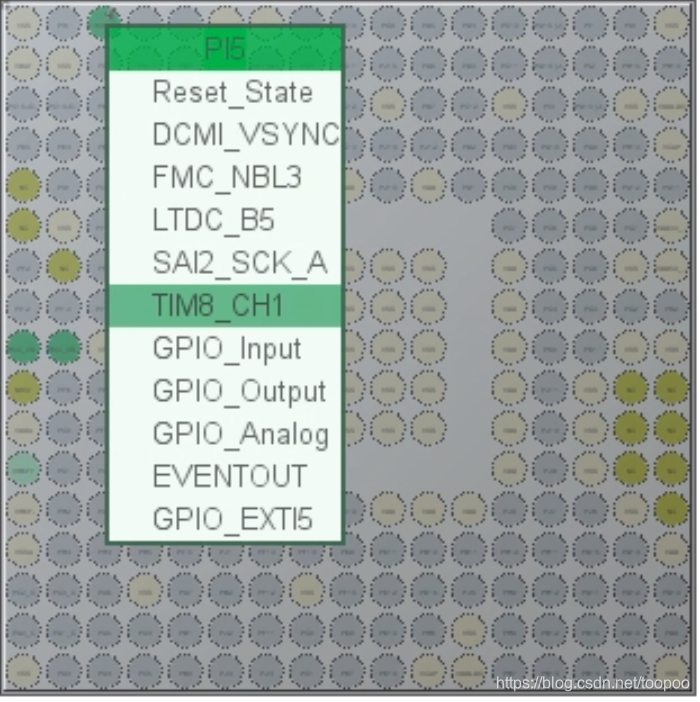
本例打开PI5的PWM输出,对应PWM8的CH1。
在board\board.h中添加如下宏定义:
#define BSP_USING_PWM8
#define BSP_USING_PWM8_CH1
#define BSP_USING_TIM8
步骤3:STM32CubeMX(或者STM32CubeIDE)配置
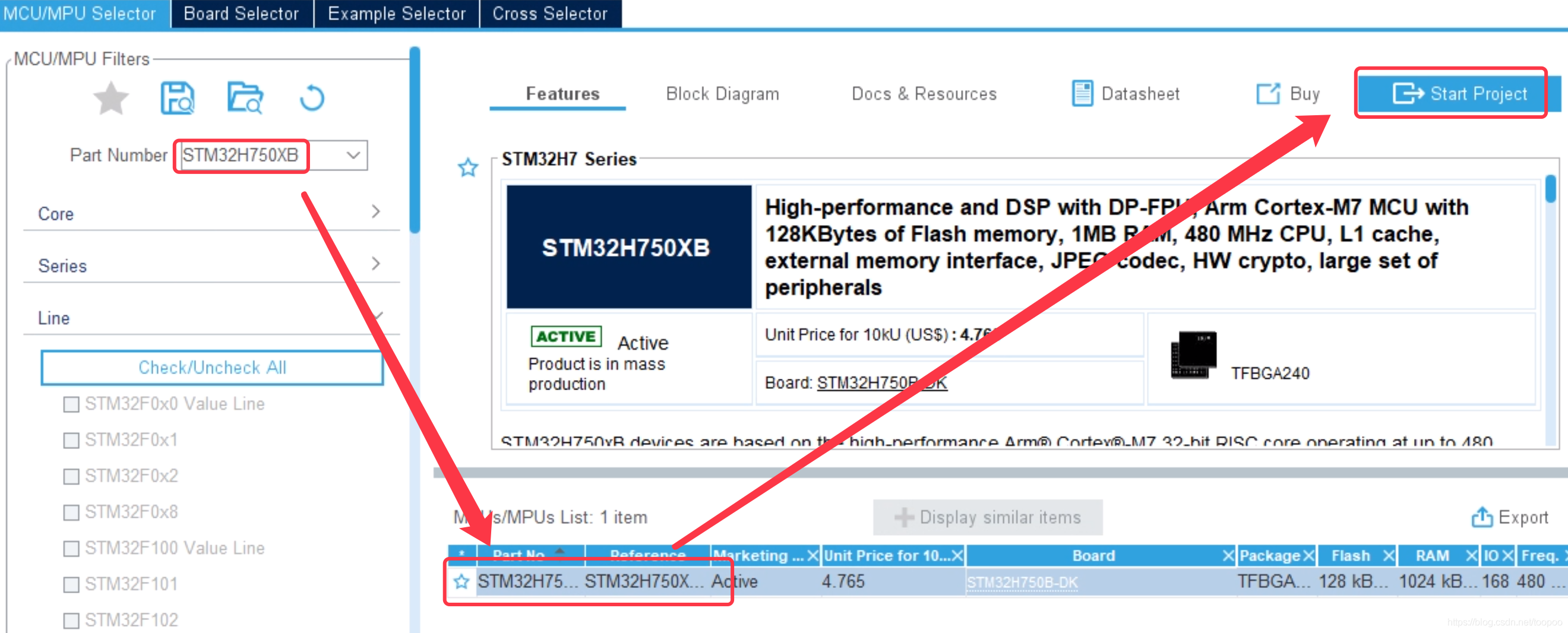
3.0 新建基于STM32H750XBHx的项目。
3.1 在Pinout view中配置PI5为TIM8_CH1
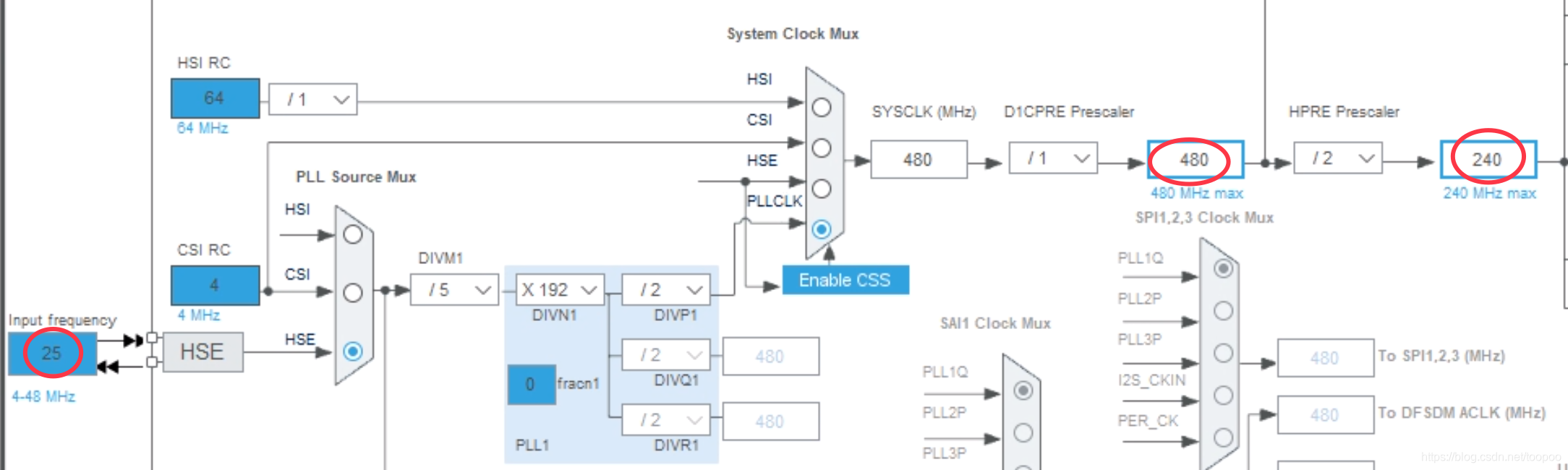
3.2 配置时钟
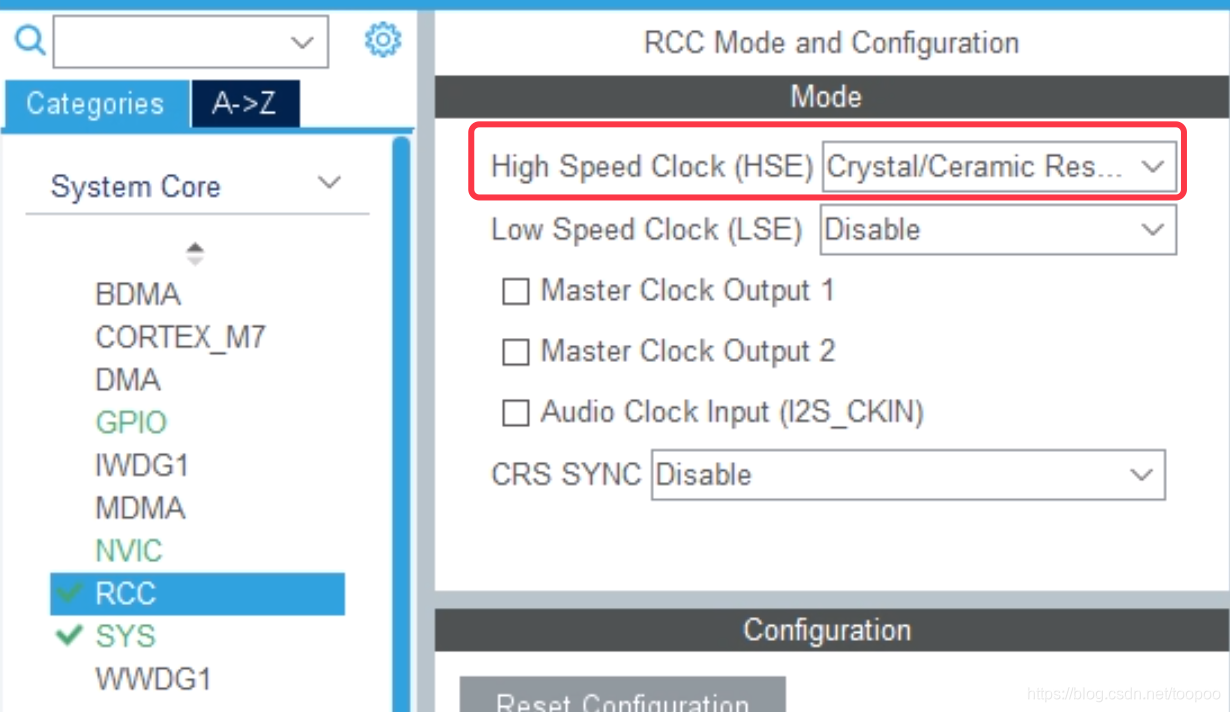
3.3 RCC中配置使用外部高速晶振HSE
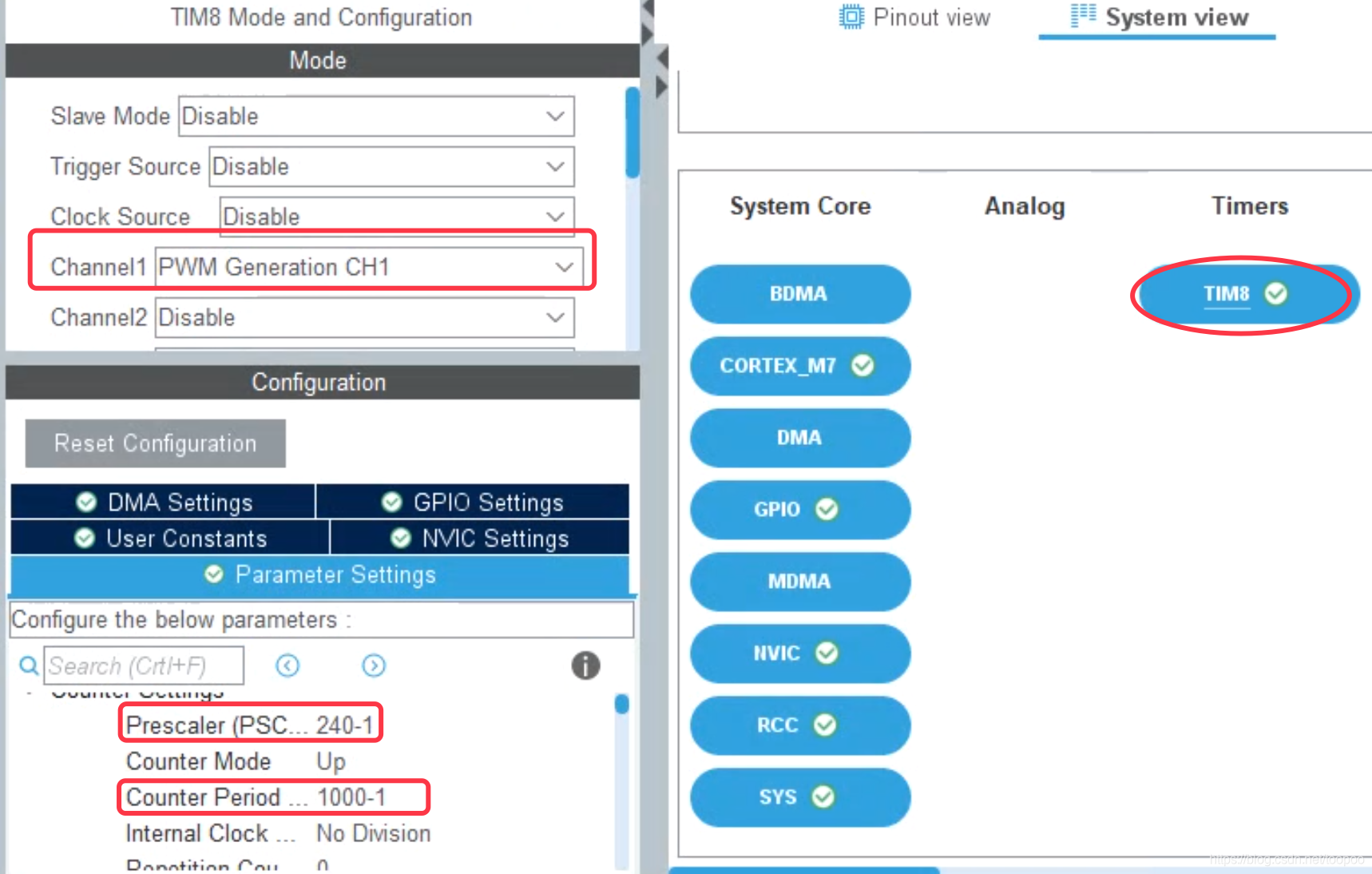
3.4 TIM8配置CH1
TIM8启用CH1
Prescaler设置为240-1
Counter Period设置为1000-1
这样将PWM频率设为1KHz
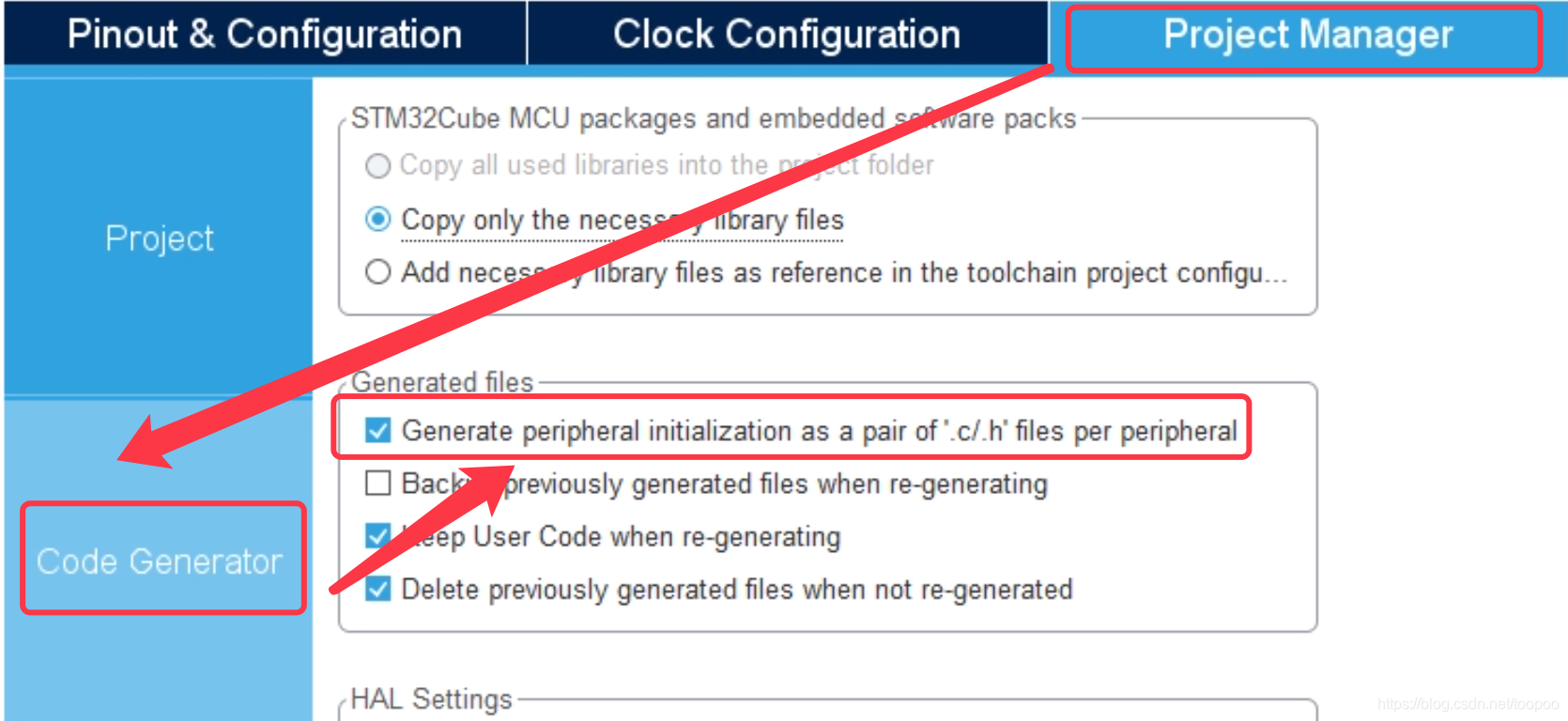
3.5 设置代码输出选项
在Project Manager的Code Generator中,选中Generate peripheral initialization as a pair of '.c/.h' files per peripheral
3.6 点击Generate Code
4. 修改board.c和board.h
打开cubeMX导出代码中的Core\Src\tim.c文件
将htim8的声明和如下三个函数复制粘贴到RT-Thread 项目中的board\board.c文件中
TIM_HandleTypeDef htim8;
void MX_TIM8_Init(void)
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
具体函数实现如下(会根据不同的GPIO和PWM Channel有所差异)。
TIM_HandleTypeDef htim8;
void MX_TIM8_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {
0};
TIM_OC_InitTypeDef sConfigOC = {
0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {
0};
htim8.Instance = TIM8;
htim8.Init.Prescaler = 240-1;
htim8.Init.CounterMode = TIM_COUNTERMODE_UP;
htim8.Init.Period = 1000-1;
htim8.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim8.Init.RepetitionCounter = 0;
htim8.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim8) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterOutputTrigger2 = TIM_TRGO2_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim8, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim8, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.Break2State = TIM_BREAK2_DISABLE;
sBreakDeadTimeConfig.Break2Polarity = TIM_BREAK2POLARITY_HIGH;
sBreakDeadTimeConfig.Break2Filter = 0;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim8, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim8);
}
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM8)
{
/* USER CODE BEGIN TIM5_MspInit 0 */
/* USER CODE END TIM5_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM8_CLK_ENABLE();
/* USER CODE BEGIN TIM5_MspInit 1 */
/* USER CODE END TIM5_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
if(htim->Instance==TIM8)
{
/* USER CODE BEGIN TIM8_MspPostInit 0 */
/* USER CODE END TIM8_MspPostInit 0 */
__HAL_RCC_GPIOI_CLK_ENABLE();
/**TIM8 GPIO Configuration
PI5 ------> TIM8_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF3_TIM8;
HAL_GPIO_Init(GPIOI, &GPIO_InitStruct);
/* USER CODE BEGIN TIM8_MspPostInit 1 */
/* USER CODE END TIM8_MspPostInit 1 */
}
}
/**
* @brief TIM_PWM MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM8)
{
/* USER CODE BEGIN TIM5_MspDeInit 0 */
/* USER CODE END TIM5_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM8_CLK_DISABLE();
/* USER CODE BEGIN TIM5_MspDeInit 1 */
/* USER CODE END TIM5_MspDeInit 1 */
}
}
然后修改board\board.h,添加如下几行:
void MX_TIM8_Init(void);
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm);
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm);
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim);
5. 修改main.c
main.c代码使用一个线程来调节PWM输出,注意首先要导入
board.h头文件,并在main函数中调用MX_TIM8_Init();。
#include <rtthread.h>
#include <rtdevice.h>
#include "drv_common.h"
#include "board.h"
#define LOG_TAG "thread_app"
#define LOG_LVL LOG_LVL_DBG
#include <ulog.h>
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
#define PWM_DEV_NAME "pwm8" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 1 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
static rt_thread_t pwm_tid;
static void pwm_thread_entry(void *parameter)
{
rt_uint32_t period, pulse, dir;
period = 1000000; /* 1KHz周期为1ms,这里单位是纳秒ns,1ms等于10的6次方纳秒ns*/
pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns */
dir = 1;
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);
}
rt_kprintf("pwm sample run ! find %s device!\n", PWM_DEV_NAME);
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
while (1)
{
rt_thread_mdelay(50);
if (dir)
{
pulse += 20000; /* 从0值开始每次增加20000ns */
}
else
{
pulse -= 20000; /* 从最大值开始每次减少20000ns */
}
if (pulse >= period)
{
dir = 0;
// rt_kprintf("pwm sample change direction! to --\n");
}
if (0 == pulse)
{
dir = 1;
// rt_kprintf("pwm sample change direction to ++ !\n");
}
/* 设置PWM周期和脉冲宽度并启动 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
}
}
int main(void)
{
MX_TIM8_Init();
pwm_tid = rt_thread_create("pwm_thread",
pwm_thread_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (pwm_tid != RT_NULL)
{
//启动线程1
rt_thread_startup(pwm_tid);
LOG_D("pwm_thread created successful");
}
else {
LOG_D("pwm_thread created failed");
}
return RT_EOK;
}
#include "stm32h7xx.h"
static int vtor_config(void)
{
/* Vector Table Relocation in Internal QSPI_FLASH */
SCB->VTOR = QSPI_BASE;
return 0;
}
INIT_BOARD_EXPORT(vtor_config);
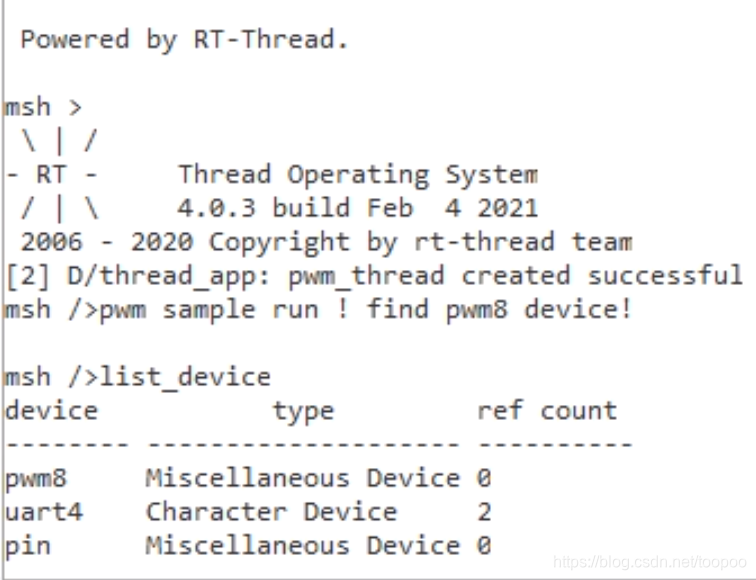
如果项目开启了finsh,可以通过list_device查看到pwm8这个设备,如下图所示。
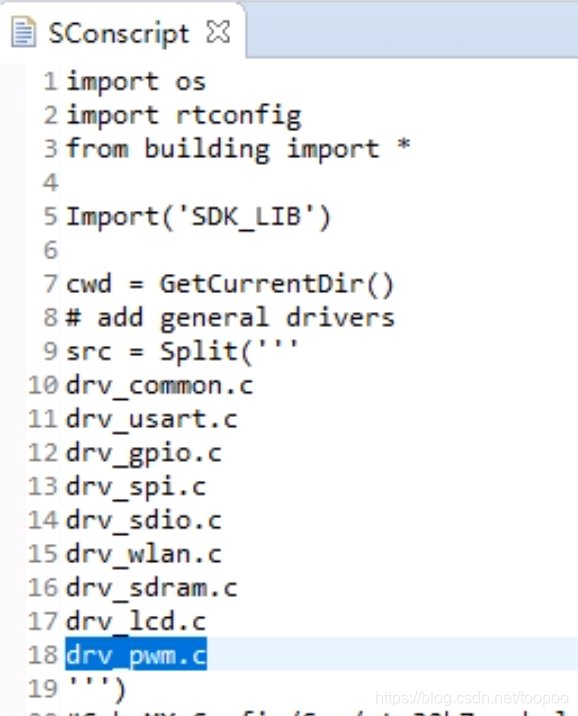
6. 避坑指南
前面说我们创建的是基于ART-Pi开发板的模板工程,那么是有一个需要修改的地方,这一点在目前任何网上一个教程都没有提到。默认情况下,ART-Pi开发板模板工程默认是将libraries\drivers\drv_pwm.c排除在构建之外的,需要修改libraries\drivers\SConscript文件,添加drv_pwm.c文件,才能正确配置pwm设备。如下图。
智能推荐
Java--GUI编程练习题_下列哪种组件在布局时常被放入 jscrollpane 中()。-程序员宅基地
文章浏览阅读6.4k次,点赞8次,收藏28次。1、在JScrollPane的构造方法中,用于创建一个显示指定组件的JScrollPane面板,只要组件的内容超过视图大小就会显示水平和垂直滚动条的方法是()A、JScrollPane()B、JScrollPane(Componentview)C、JScrollPane(ComponentviewD、intvsbPolicy参考答案 :B2、在GUI中用于表示这些窗体事件的类是( )A、WindowEventB、WindowListenerC、ActionEventD、Mouse_下列哪种组件在布局时常被放入 jscrollpane 中()。
Spring_动态代理_通知的执行顺序_动态代理多个代理如何顺序-程序员宅基地
文章浏览阅读6.5k次,点赞5次,收藏4次。Spring_动态代理_AOP02_动态代理多个代理如何顺序
动态规划之背包问题(01背包问题、完全背包问题、多重背包问题 I、多重背包问题 II 、分组背包问题)_01背包问题时间复杂度为k-程序员宅基地
文章浏览阅读5.1w次,点赞354次,收藏1.7k次。动态规划之背包问题(01背包问题、完全背包问题、多重背包问题 I、多重背包问题 II 、分组背包问题)_01背包问题时间复杂度为k
matlab 信号频域分析,如何使用matlab进行频域分析-程序员宅基地
文章浏览阅读2.2k次。Matlab可以说是一个非常有用且功能齐全的工具,在通信、自控、金融等方面有广泛的应用。本文讨论使用Matlab对信号进行频域分析的方法。说到频域,不可避免的会提到傅里叶变换,傅里叶变换提供了一个将信号从时域转变到频域的方法。之所以要有信号的频域分析,是因为很多信号在时域不明显的特征可以在频域下得到很好的展现,可以更加容易的进行分析和处理。FFTMatlab提供的傅里叶变换的函数是FFT,中文名叫..._计算机编程实现信号的频域分析
C++开源库大全-程序员宅基地
文章浏览阅读338次。程序员要站在巨人的肩膀上,C++拥有丰富的开源库,这里包括:标准库、Web应用框架、人工智能、数据库、图片处理、机器学习、日志、代码分析等。标准库C++ Standard Library:是一系列类和函数的集合,使用核心语言编写,也是C++ISO自身标准的一部分。 Standard Template Library:标准模板库 C POSIX library: POSIX系统的..._c++开源库
一些学习资料分享-程序员宅基地
文章浏览阅读2.5k次。一些学习资料分享 极客学院视频: 安卓视频:http://yunpan.cn/ccYgs8yMjqZgY 访问密码 fbfc asp.net:http://yunpan.cn/ccYgY4qN2meZq 访问密码 c53d c:http://yunpan.cn/ccYgSgwnbwrjM 访问密码 cd71 c#:http://yunpan.cn/cc_学习资料分享
随便推点
坐标系的平移、旋转变换——超详细_坐标系旋转-程序员宅基地
文章浏览阅读5.8k次,点赞23次,收藏78次。P点在空间中保持不动,XYZ坐标系绕X轴逆时针旋转θ形成新的坐标系X´Y´Z´,P点在XYZ中的坐标为(x, y, z),P点在X´Y´Z´中的坐标为(x´, y´, z´),现在我们已知(x, y, z)、旋转角度θ和(x´, y´, z´),求旋转矩阵Rx。已知点P在XYZ坐标系中的坐标为(x,y,z),点P在X´Y´Z´中的坐标为(x´,y´,z´),我们要求的是XYZ坐标系变换到X´Y´Z´坐标系这个过程中的旋转矩阵。从书中的截图中可以验证,自己推导的平移变换以及右手坐标系的旋转矩阵是没有问题的。_坐标系旋转
增量式PID控制算法的C++代码实现_增量式pid控制算法代码-程序员宅基地
文章浏览阅读1.3k次,点赞2次,收藏3次。void prpvtest::PID_Init(){ cout << "PID_Init begin!" << endl; pid.SetSpeed = 0; pid.ActualSpeed = 0; pid.Err = 0; pid.Err_last = 0; pid.Err_Next = 0; pid.Kp = _..._增量式pid控制算法代码
操作系统 -- 缓冲区(buffer)与缓存(cache)_输入缓冲区与输出缓冲区是一个内存吗-程序员宅基地
文章浏览阅读3.9k次,点赞8次,收藏19次。缓冲区(buffer),它是内存空间的一部分。也就是说,在内存空间中预留了一定的存储空间,这些存储空间用来缓冲输入或输出的数据,这部分预留的空间就叫做缓冲区,显然缓冲区是具有一定大小的。缓冲区根据其对应的是输入设备还是输出设备,分为输入缓冲区和输出缓冲区。_输入缓冲区与输出缓冲区是一个内存吗
华为matepro40pro鸿蒙,华为Mate40Pro:对不起,正式说再见-程序员宅基地
文章浏览阅读318次。来源:潮流数码驿站华为已经是全球顶级的智能手机品牌,但是它现在受到严重打击,实力也大大被削弱,还是令人感到挺惋惜的。当然,如今华为的处境也造成一系列的问题,除了一些旧款产品已经无法供应之外,一些新发布的旗舰机口碑和销量也是呈现直线下滑的趋势,其中就包括华为 Mate40Pro。华为 Mate40Pro 本质上是一款打磨得挺到位的国产旗舰机,可是现在却有不少的网友表示华为 Mate40Pro,对不起..._mate4pro尸鸿蒙吗
头歌educoder-Python程序设计-第五阶段 类与对象-类的其它特性_头歌类的其它特性-程序员宅基地
文章浏览阅读5.8k次,点赞13次,收藏42次。关卡一:类的内建函数import specialmethodtestsc = specialmethodtest.subClass()# 请在下面填入判断subClass是否为parentClass的子类的代码,并输出结果########## Begin ##########print(issubclass(specialmethodtest.subClass, specialmethodtest.parentClass))########## End ########### ..._头歌类的其它特性
初中学历学前端难不难_计算机前端初中学难不难-程序员宅基地
文章浏览阅读609次。初中学历学前端难不难那肯定难啊。如果年纪不大,而且对IT这方面又比较感兴趣,我建议先去想办法提升一下自己的学历,成人本科也是可以的,该说不说,这东西花点钱还是可以弄到的,毕竟现在IT行业还是很看重学历的,学历是工作的第一块敲门砖,可能有人会说能力更重要,但是我告你你没有学历,别人根本不会去了解你是否有能力。当然花钱买的那个学历也不是处处管用,像大一点的公司需要的学历是需要学信网认证的,但你搞个学历,很多你之前初中文凭进不去的公司可能就会考虑你。如果真的考虑好了的话我建议去报个短期的培训班,毕竟是初中文凭_计算机前端初中学难不难