《视觉SLAM十四讲》源码详细注解---/project/0.2/visual_odometry_slam14讲源码-程序员宅基地
技术标签: slam
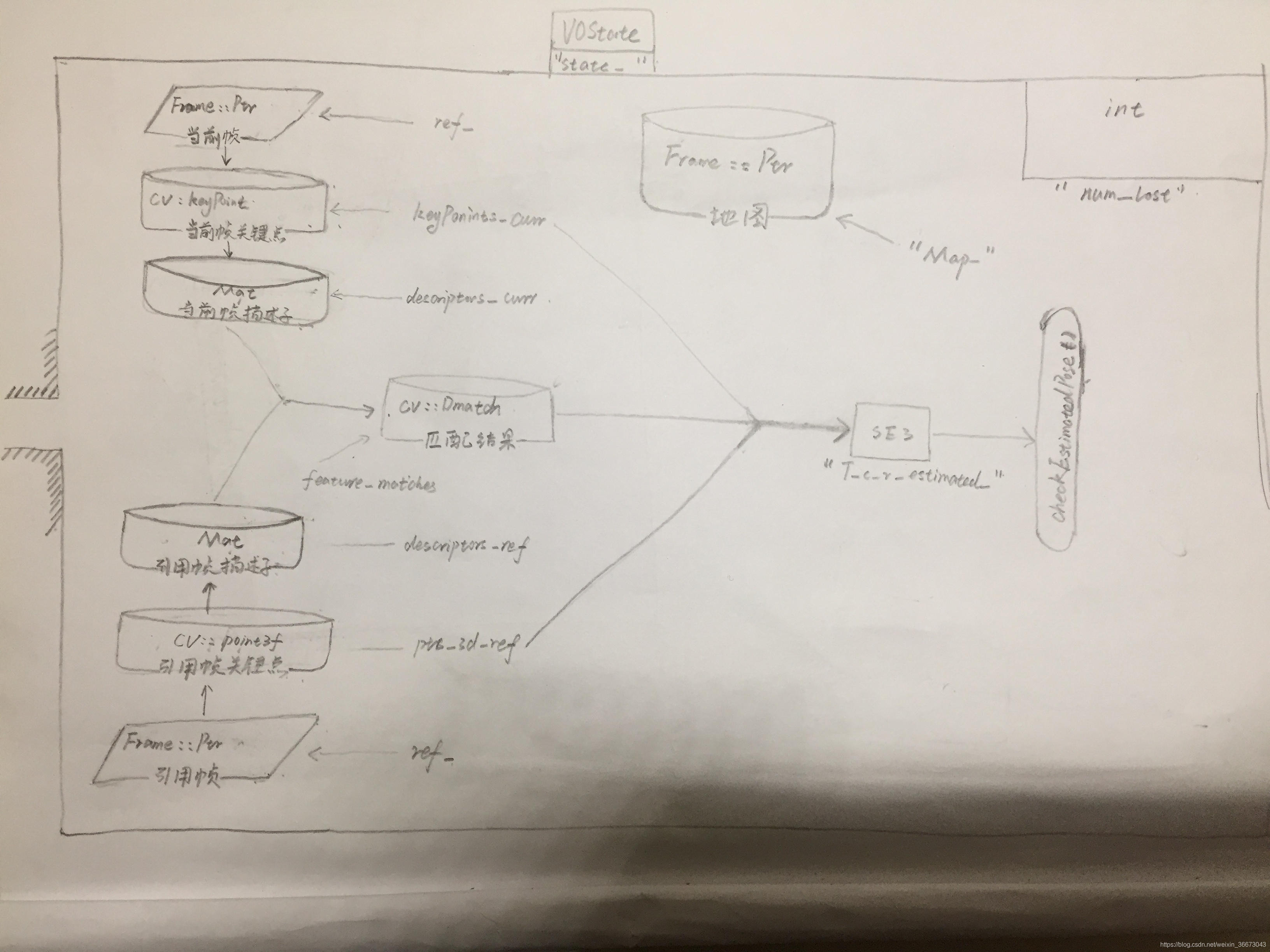
逻辑框架——要素图
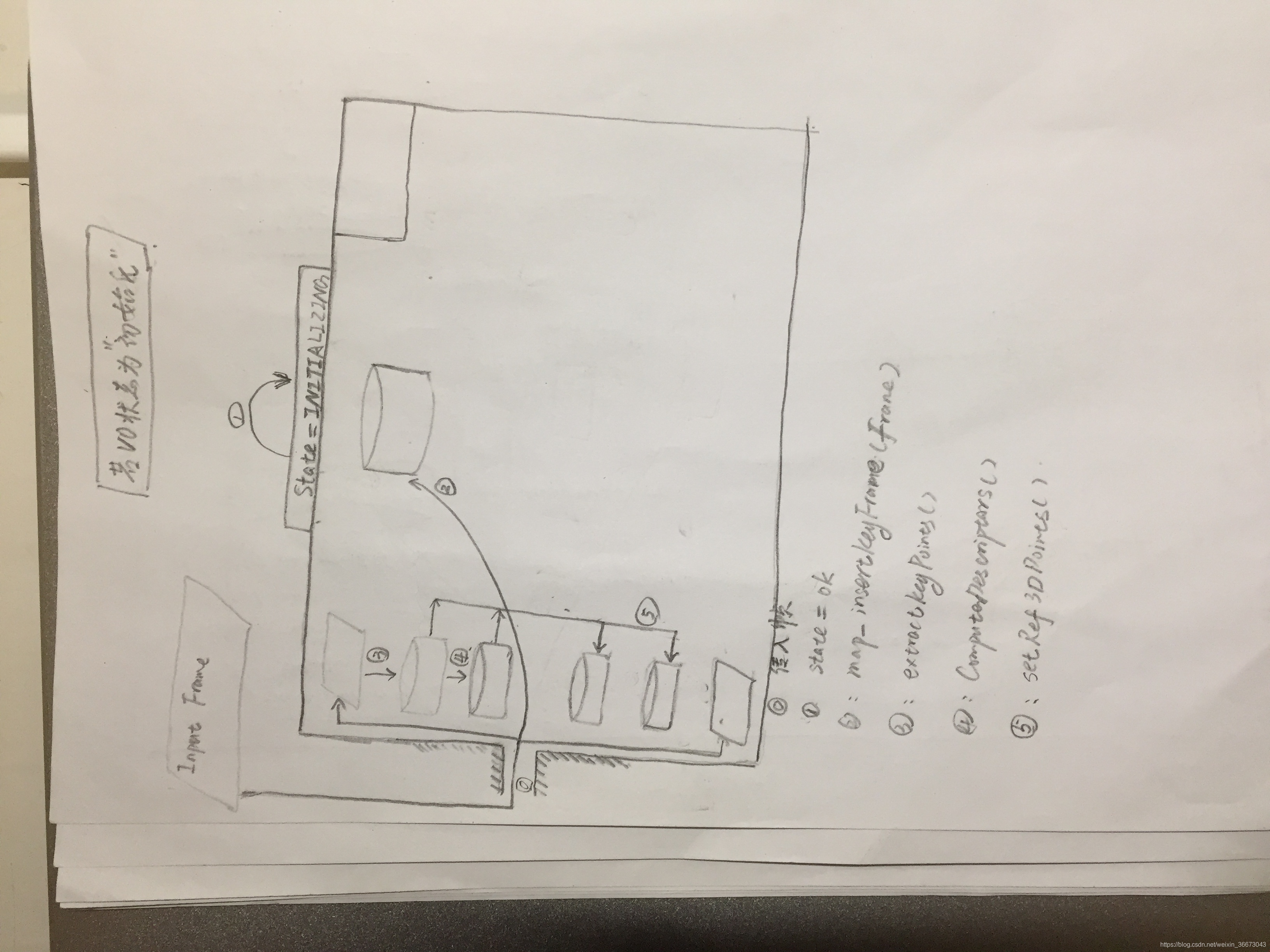
逻辑框架——流程图——>初始化状态
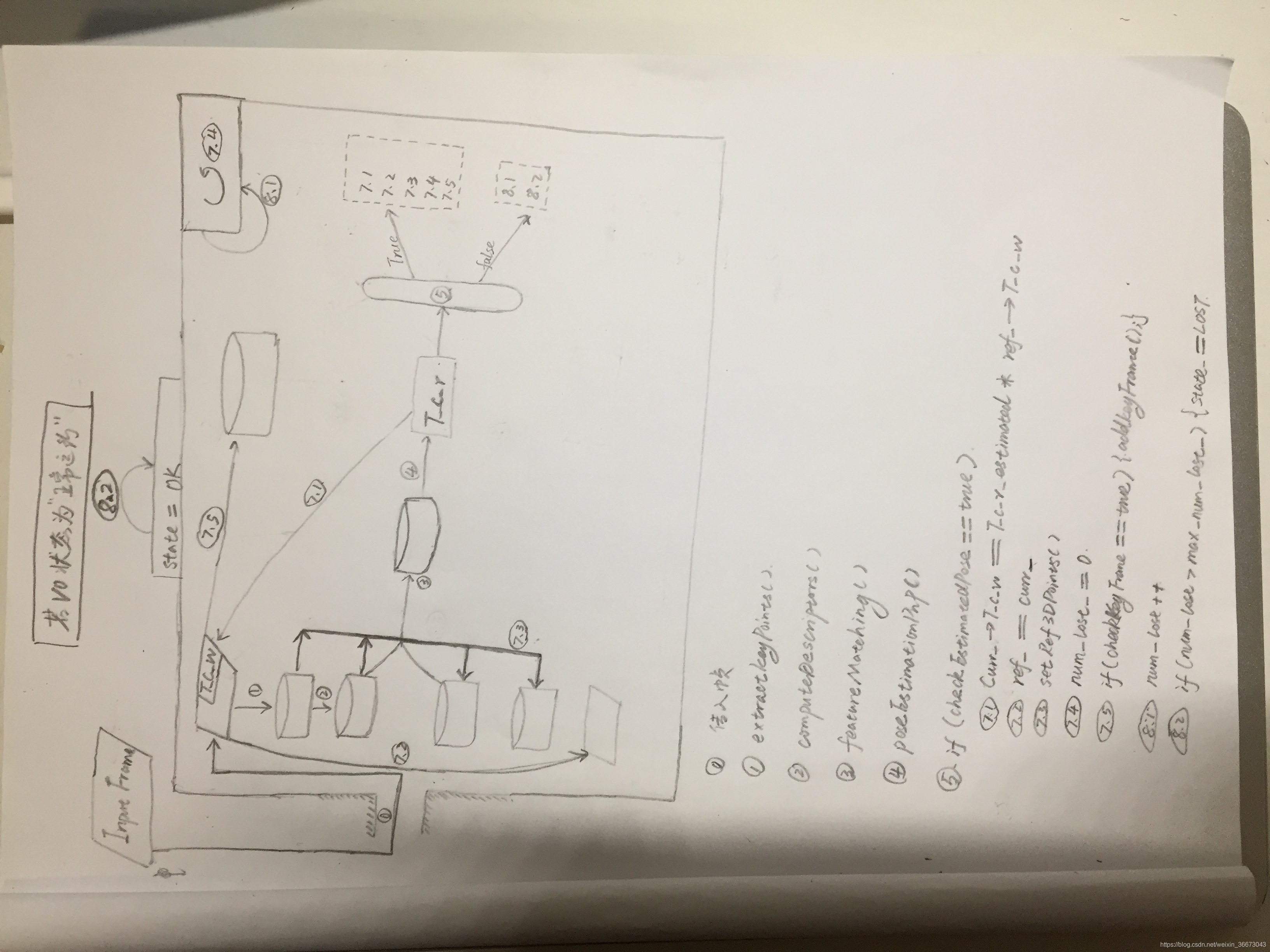
逻辑框架——流程图——>正常运转状态
头文件——/slam14/project/0.2/include/myslam/visual_odometry.h
/*
* <one line to give the program's name and a brief idea of what it does.>
* Copyright (C) 2016 <copyright holder> <email>
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*
*/
#ifndef VISUALODOMETRY_H
#define VISUALODOMETRY_H
#include "myslam/common_include.h"
#include "myslam/map.h"
#include <opencv2/features2d/features2d.hpp>
namespace myslam
{
class VisualOdometry
{
public:
typedef shared_ptr<VisualOdometry> Ptr;
//枚举表征VO状态,初始化、正常、丢失
enum VOState {
INITIALIZING=-1,
OK=0,
LOST
};
//VO状态、地图(关键帧和特征点)、参考帧、当前帧
VOState state_; // current VO status
Map::Ptr map_; // map with all frames and map points
Frame::Ptr ref_; // reference frame
Frame::Ptr curr_; // current frame
//orb、当前帧特征点KeyPoint、当前帧描述子、参考帧3D坐标Point3f、参考帧描述子、匹配关系
cv::Ptr<cv::ORB> orb_; // orb detector and computer
// 当前帧的关键点,描述子存放位置
vector<cv::KeyPoint> keypoints_curr_; // keypoints in current frame
Mat descriptors_curr_; // descriptor in current frame
// 引用帧关键点,描述子存放位置
vector<cv::Point3f> pts_3d_ref_; // 3d points in reference frame
Mat descriptors_ref_; // descriptor in reference frame
// 当前帧vs引用帧匹配结果存放位置
vector<cv::DMatch> feature_matches_;
//位姿估计T、内点数(即为匹配出的关键点数量)、丢失数
SE3 T_c_r_estimated_; // the estimated pose of current frame 当前帧相对于参考帧的T
int num_inliers_; // number of inlier features in icp
int num_lost_; // number of lost times
//参数,特征数量、尺度、好匹配比率、最大持续丢失时间、最小内点数
// parameters
int num_of_features_; // number of features
double scale_factor_; // scale in image pyramid=图像金字塔比例尺
int level_pyramid_; // number of pyramid levels=金字塔层数
float match_ratio_; // ratio for selecting good matches = good matches 占比?
int max_num_lost_; // max number of continuous lost times=最大连续丢失帧数
int min_inliers_; // minimum inliers=
//关键帧筛选标准:最小旋转量&最小平移量,只要T满足其中一个即可
double key_frame_min_rot; // minimal rotation of two key-frames
double key_frame_min_trans; // minimal translation of two key-frames
public: // functions
VisualOdometry();
~VisualOdometry();
//核心,添加新关键帧
bool addFrame( Frame::Ptr frame ); // add a new frame
protected:
// inner operation
// 内部处理函数,特征匹配
void extractKeyPoints();
void computeDescriptors();
void featureMatching();
void poseEstimationPnP();
void setRef3DPoints();
// 关键帧的功能函数
void addKeyFrame();
bool checkEstimatedPose();
bool checkKeyFrame();
};
}
#endif // VISUALODOMETRY_H
源文件——/slam14/project/0.2/src/visual_odometry.cpp
/*
* <one line to give the program's name and a brief idea of what it does.>
* Copyright (C) 2016 <copyright holder> <email>
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*
*/
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <algorithm>
#include <boost/timer.hpp>
#include "myslam/config.h"
#include "myslam/visual_odometry.h"
namespace myslam
{
VisualOdometry::VisualOdometry() :
state_ ( INITIALIZING ), ref_ ( nullptr ), curr_ ( nullptr ), map_ ( new Map ), num_lost_ ( 0 ), num_inliers_ ( 0 )
{
num_of_features_ = Config::get<int> ( "number_of_features" );// 特征点数量
scale_factor_ = Config::get<double> ( "scale_factor" ); // scale in image pyramid=图像金字塔比例尺
level_pyramid_ = Config::get<int> ( "level_pyramid" );// number of pyramid levels=金字塔层数
match_ratio_ = Config::get<float> ( "match_ratio" );// ?????ratio for selecting good matches = good matches 占比?
max_num_lost_ = Config::get<float> ( "max_num_lost" );// max number of continuous lost times=最大连续丢失帧数
min_inliers_ = Config::get<int> ( "min_inliers" );// 最少的内点数量???????
key_frame_min_rot = Config::get<double> ( "keyframe_rotation" );// ?????关键帧旋转??????
key_frame_min_trans = Config::get<double> ( "keyframe_translation" );// # ????关键帧变换??????
orb_ = cv::ORB::create ( num_of_features_, scale_factor_, level_pyramid_ );
}
VisualOdometry::~VisualOdometry()
{
}
bool VisualOdometry::addFrame ( Frame::Ptr frame )
{
switch ( state_ )
{
//1. 初始化状态,第一帧
case INITIALIZING://状态:初始化
{
state_ = OK;
curr_ = ref_ = frame;//当前帧和参考帧都是第一帧,实际上当前帧指向NULL也是行的。
map_->insertKeyFrame ( frame );//将此帧插入地图中
// extract features from first frame
//提取关键点和描述子
extractKeyPoints();//初始帧(当前帧)提取特征点
computeDescriptors();// 初始帧(当前帧)计算描述子
//当前帧转化成引用帧(说实话,我觉得这个函数没有写好,语义不是很清楚,语义介于“引用的坐标2D-->3D”和“利用当前帧生成引用帧”)
setRef3DPoints();// compute the 3d position of features in ref frame
break;
}
case OK:
{
curr_ = frame;
extractKeyPoints();//当前帧提取特征点
computeDescriptors();//当前帧计算描述子
//特征匹配并计算相机位姿 T
featureMatching();//当前帧vs引用帧,结果放入feature_matches_中
poseEstimationPnP();//pnp方法进行位姿估计(说明:未利用当前帧的深度信息)
//位姿估计好
if ( checkEstimatedPose() == true ) // a good estimation
{
//当前位姿 Tcw = Tcr*Trw
curr_->T_c_w_ = T_c_r_estimated_ * ref_->T_c_w_; // T_c_w = T_c_r*T_r_w
ref_ = curr_;//当前帧为参考帧
setRef3DPoints();//参考帧特征点的3D坐标,补全depth数据
num_lost_ = 0;//num_lost重置为0。
//检查是否为关键帧
if ( checkKeyFrame() == true ) // is a key-frame
{
addKeyFrame();
}
}
else // bad estimation due to various reasons
//位姿估计坏,丢失点计数+1,判断是否大于最大丢失数,是则VO状态切换为lost
{
num_lost_++;
if ( num_lost_ > max_num_lost_ )
{
state_ = LOST;
}
return false;
}
break;
}
case LOST://3. 匹配失败状态
{
cout<<"vo has lost."<<endl;
break;
}
}
return true;
}
// 当前帧提取特征点
void VisualOdometry::extractKeyPoints()
{
orb_->detect ( curr_->color_, keypoints_curr_ );//从curr_->color_中检测出keypoint放入keypoints_curr_
}
// 当前帧计算描述子
void VisualOdometry::computeDescriptors()
{
orb_->compute ( curr_->color_, keypoints_curr_, descriptors_curr_ );//计算curr_->color_中检测出的keypoint的descriptor
}
// 特征点匹配
void VisualOdometry::featureMatching()
{
// 关键点匹配:match desp_ref and desp_curr, use OpenCV's brute force match
vector<cv::DMatch> matches;//matches----->匹配结果存放地点(筛选前))
cv::BFMatcher matcher ( cv::NORM_HAMMING );
matcher.match ( descriptors_ref_, descriptors_curr_, matches );
// 关键点筛选:select the best matches
//找到matches数组中最小距离,赋值给min_dist
float min_dis = std::min_element (
matches.begin(), matches.end(),
[] ( const cv::DMa tch& m1, const cv::DMatch& m2 )
{
return m1.distance < m2.distance;
} )->distance;
feature_matches_.clear();//清除上次匹配结果
//根据距离筛选特征点
for ( cv::DMatch& m : matches )
{
if ( m.distance < max<float> ( min_dis*match_ratio_, 30.0 ) )
{
feature_matches_.push_back(m);//符合条件的匹配放入feature_matches_
}
}
cout<<"good matches: "<<feature_matches_.size()<<endl;
}
// 引用帧3D点设置
//pnp需要参考帧3D,当前帧2D,所以当前帧迭代为参考帧时,需要加上depth数据
// 每轮循环结束,都需要把当前帧变成参考帧,这时候就需要把当前帧的坐标的2D形式转化成3D形式
void VisualOdometry::setRef3DPoints()
{
// select the features with depth measurements
pts_3d_ref_.clear();
descriptors_ref_ = Mat();
//遍历当前关键点数组遍历
for ( size_t i=0; i<keypoints_curr_.size(); i++ )
{
//找到depth数据
double d = ref_->findDepth(keypoints_curr_[i]);
if ( d > 0)
{
//像素坐标到相机坐标系3D坐标
Vector3d p_cam = ref_->camera_->pixel2camera(//这一块,用curr_->camera也是可以的,因为相机是一样的
Vector2d(keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y), d
);
//构造Point3f,3D坐标
pts_3d_ref_.push_back( cv::Point3f( p_cam(0,0), p_cam(1,0), p_cam(2,0) ));
//参考帧描述子,将当前帧描述子按行放进去。
descriptors_ref_.push_back(descriptors_curr_.row(i));
}
}
}
// 使用pnp进行位置估计
// PnP估计相机位姿T
// 使用pts_3d_ref_ 、keypoints_curr_、feature_matches_、相机参数----->estimate出相机的T
void VisualOdometry::poseEstimationPnP()
{
// construct the 3d 2d observations
//参考帧3D坐标和当前帧2D坐标(需要.pt像素坐标)
vector<cv::Point3f> pts3d;
vector<cv::Point2f> pts2d;
for ( cv::DMatch m:feature_matches_ )
{
pts3d.push_back( pts_3d_ref_[m.queryIdx] );//query=ref
pts2d.push_back( keypoints_curr_[m.trainIdx].pt );//train=curr
}
//相机内参不变
Mat K = ( cv::Mat_<double>(3,3)<<
ref_->camera_->fx_, 0, ref_->camera_->cx_,
0, ref_->camera_->fy_, ref_->camera_->cy_,
0,0,1
);
//旋转、平移、内点数组
Mat rvec, tvec, inliers;
//核心函数
cv::solvePnPRansac( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );
// 猜测内点数,应该是匹配出的特征点中真正被位姿估计函数使用的那些点
num_inliers_ = inliers.rows;
cout<<"pnp inliers: "<<num_inliers_<<endl;
//由旋转和平移构造出当前帧相对于参考帧的T
T_c_r_estimated_ = SE3(
SO3(rvec.at<double>(0,0), rvec.at<double>(1,0), rvec.at<double>(2,0)),
Vector3d( tvec.at<double>(0,0), tvec.at<double>(1,0), tvec.at<double>(2,0))
);
}
// 位置估计检查,
//位姿检验模块,匹配点不能太少,运动不能太大
bool VisualOdometry::checkEstimatedPose()
{
// check if the estimated pose is good
//匹配点太少,false
if ( num_inliers_ < min_inliers_ )
{
cout<<"reject because inlier is too small: "<<num_inliers_<<endl;
return false;
}
// if the motion is too large, it is probably wrong
//T的模太大,false
Sophus::Vector6d d = T_c_r_estimated_.log();
if ( d.norm() > 5.0 )
{
cout<<"reject because motion is too large: "<<d.norm()<<endl;
return false;
}
return true;
}
// 检查关键帧,T中R或t比较大都是关键帧
bool VisualOdometry::checkKeyFrame()
{
Sophus::Vector6d d = T_c_r_estimated_.log();
Vector3d trans = d.head<3>();
Vector3d rot = d.tail<3>();
if ( rot.norm() >key_frame_min_rot || trans.norm() >key_frame_min_trans )
return true;
return false;
}
// 添加关键帧
void VisualOdometry::addKeyFrame()
{
cout<<"adding a key-frame"<<endl;
map_->insertKeyFrame ( curr_ );
}
}非常糙的初步版本,后面有时间再优化!
智能推荐
《ActBERT》百度&悉尼科技大学提出ActBERT,学习全局局部视频文本表示,在五个视频-文本任务中有效!...-程序员宅基地
文章浏览阅读155次。关注公众号,发现CV技术之美本文分享论文『ActBERT: Learning Global-Local Video-Text Representations』,百度&悉尼科技大学提出《ActBERT》,学习全局局部视频文本表示,在五个视频-文本任务中有效!详细信息如下:论文链接:https://arxiv.org/abs/2011.07231 01..._actbert
smartivr 5.0 接口说明 (智能电话机器人话术开发接口)_ivr流程中接口有哪些-程序员宅基地
文章浏览阅读478次。FreeSWITCH 电话机器人 smartivr 接口文档_ivr流程中接口有哪些
AAAI 2024 | 腾讯优图实验室27篇论文入选,含表格结构识别、异常图像生成、医学图像分割等研究方向...-程序员宅基地
文章浏览阅读289次。关注公众号,发现CV技术之美AAAI 2024 (AAAI Conference on Artificial Intelligence)人工智能国际会议于近日公布论文录用结果,本届会议共收到9862篇份论文投稿,最终录用2342篇论文,录用率23.75%。AAAI 是美国人工智能协会主办的年会,同时也是人工智能领域中历史最悠久、涵盖内容最广泛的的国际顶级学术会议之一。今年,腾讯优图实验室共有27..._腾讯优图实验室
神经网络在电商中的应用,神搜电商科技_电商投流 神经网路-程序员宅基地
文章浏览阅读1.3k次。根据《电子商务概论》(李琪 主编,高等教育出版社,2004年9月)第6章(电子商务链分析)中的相关内容,“商务链与交易链是将商务和交易活动进行联系与划分,并使之有序化的逻辑链条,它们高度抽象地将商务/交易活动表现为不同的节点,每个节点分别代表一定的经济事务,通过将这些节点有效地串连起来,共同形成了一个商务链或交易链。电子商务链是用来描述电子商务的交易(商务)流程的综合框架,这一分析框架从商务活动的基本过程对电子商务进行研究,揭示了电子商务的一般框架,并对电子商务链中的主要环节提供了指导性的分析方法。_电商投流 神经网路
Dubbo性能优化_dubbo接口发送1m数据需要多久-程序员宅基地
文章浏览阅读995次。https://my.oschina.net/u/1378920/blog/739399Dubbo性能优化背景dubbo作为一款分布式服务框架,除了提供远程调用的细节封装,还提供了基本的服务治理功能,能够粗略地监控系统性能。上图展示的是dubbo执行流程的原理图,在客户端和服务端都有一个程序去统计调用信息,其中有价值的信息有延迟时间、并发数、调用次数等,完成记录_dubbo接口发送1m数据需要多久
集群时钟同步问题_grid中集群时间同步问题-程序员宅基地
文章浏览阅读82次。问题举⼀个例⼦,电商⽹站业务中,新增⼀条订单,那么势必会在订单表中增加了⼀条记录,该条记录中应该会有“下单时间”这样的字段,往往我们会在程序中获取当前系统时间插⼊到数据库或者直接从数据库服务器获取时间。那我们的订单⼦系统是集群化部署,或者我们的数据库也是分库分表的集群化部署,然⽽他们的系统时钟缺不⼀致,⽐如有⼀台服务器的时间是昨天,那么这个时候下单时间就成了昨天,那我们的数据将会混乱!集群时钟同步配置集群时钟同步思路:分布式集群中各个服务器节点都可以连接互联⽹操作⽅式:#使⽤ ntpdat_grid中集群时间同步问题
随便推点
【BLDC理论篇】无刷直流电机与永磁同步电机比较_为什么bldc转矩波动大-程序员宅基地
文章浏览阅读1.6w次,点赞23次,收藏111次。现代电机与控制技术以电流驱动模式的不同将永磁无刷直流电动机分为两大类:1)方波驱动电机,也即无刷直流电机(BLDC);2)正弦波驱动电机:也即永磁同步电机(PMSM)。 表面来看,BLDC和PMSM的基本结构是相同的:1)它们的电动机都是永磁电动机,转子由永磁体组成基本结构,定子安放有多相交流绕组;2)都是由永久磁铁转子和定子的交流电流相互作用产生电机的转矩;3)在绕组中的..._为什么bldc转矩波动大
深入理解jvm-java内存模型(结合volatile)_volatile jvm-程序员宅基地
文章浏览阅读413次。1. 结构所有的变量存储在主内存每条线程都有自己的工作内存线程的工作内存保存了该线程所使用变量的主内存副本线程对变量的所有操作必须在工作内存中进行,不得直接操作主内存线程间变量的传递必须由主内存来交互完成2.内存间交互原子操作·lock(锁定):作用于主内存的变量,它把一个变量标识为一条线程独占的状态。·unlock(解锁):作用于主内存的变量,它把一个处于锁定状态的变量释..._volatile jvm
蔡司全球新品发布会暨新品技术分享会上线-程序员宅基地
文章浏览阅读268次。顺应今年特殊环境下企业的迫切需求,蔡司通过线上发布形式,突破目前线下交流所受到的约束,以数字化方式迎接“新常态”,让用户能够同以往一样及时、便捷地了解蔡司最新创新方案。10月20日,蔡司..._蔡司秋季发布会
实时显示iOS编写UI代码效果_[self.reloadbutton mas_makeconstraints:^(masconstr-程序员宅基地
文章浏览阅读564次。实时显示iOS编写UI代码效果分类: iOS 2015-05-08 18:48 255人阅读 评论(0)收藏 举报IOS实时显示UI目录(?)[+]编写iOS应用UI的方式大概有两种,一种是Storyboard/Xib,另一种是手写代码。采用Storyboard/Xib方式组织UI,由于提供可视化的特性,只要从UI库中拖动UI控件,便可以_[self.reloadbutton mas_makeconstraints:^(masconstraintmaker *make) {
python爬虫运行的整体流程_Python 网络爬虫程序架构及运行流程-程序员宅基地
文章浏览阅读460次。1 前言Python开发网络爬虫获取网页数据的基本流程为:发起请求通过URL向服务器发起request请求,请求可以包含额外的header信息。获取响应内容服务器正常响应,将会收到一个response,即为所请求的网页内容,或许包含HTML,Json字符串或者二进制的数据(视频、图片)等。解析内容如果是HTML代码,则可以使用网页解析器进行解析,如果是Json数据,则可以转换成Json对象进行解析..._python正在爬数据的时候可以运行程序吗
平衡二叉树详解及C++实现_c++ 二叉搜索树平衡二叉树-程序员宅基地
文章浏览阅读583次,点赞2次,收藏7次。平衡二叉搜索树_c++ 二叉搜索树平衡二叉树