STM32F103ZET6移植FreeRTOS_stm32f103zet6 free-程序员宅基地
技术标签: stm32 FreeRTOS 嵌入式硬件 单片机
FreeRTOS是一款免费开源的轻量级操作系统
一、获取源码
方式一、官网:www.freertos.org
方式二(推荐)、托管网址:
FreeRTOS Real Time Kernel (RTOS) - Browse /FreeRTOS at SourceForge.net
找到对应的版本直接下载.ZIP文件(我这里使用的是v9.0.0版本,keil编译器)。
二、文件简介
将下载好的文件解压后我们能看到文件目录下有FreeRTOS和FreeRTOS-Plus两个文件夹以及一些网页文档,-pLus版本多是在Windows模拟器上运行的,我们只使用到FreeRTOS文件中的内容。
FreeRTOS目录下:

Source目录下:

三、系统文件移植
首先,我们需要准备一个基础工程。然后再主目录下(因个人编程习惯而定)创建一个新文件夹,用于存放FreeRTOS的相关文件。

然后,将下载的FreeRTOS文件中的Source目录下的内容全部复制到新建的这个文件中。

我用的单片机型号是M3的内核,我打算使用第四种内存管理方式。所以portable文件夹中我只保留了以下三个文件
FreeRTOSv9.0.0\FreeRTOS\Source\portable\MemMang\heap_4.c
FreeRTOSv9.0.0\FreeRTOS\Source\portable\RVDS\ARM_CM3\port.c
FreeRTOSv9.0.0\FreeRTOS\Source\portable\RVDS\ARM_CM3\port.c\portmacro.h

再从Demo文件中复制FreeRTOSConfig.h到我们的include文件夹中(我这里复制了一份改好配置的头文件,没有用官方给的)。至此文件的配置就完成了。

四、软件配置
打开keil将刚刚新建并移植过来文件的FreeRTOS文件夹中的源文件和头文件路径都添加到工程中(都学到操作系统了,keil添加文件应该很熟练了)。
编译,应该会出现两个错误,是FreeRTOSConfig.h中的宏和stm32f10x_it.c中的函数重定义了,我们使用FreeRTOSConfig.h中的定义,将stm32f10x_it.c对应的函数注释掉。
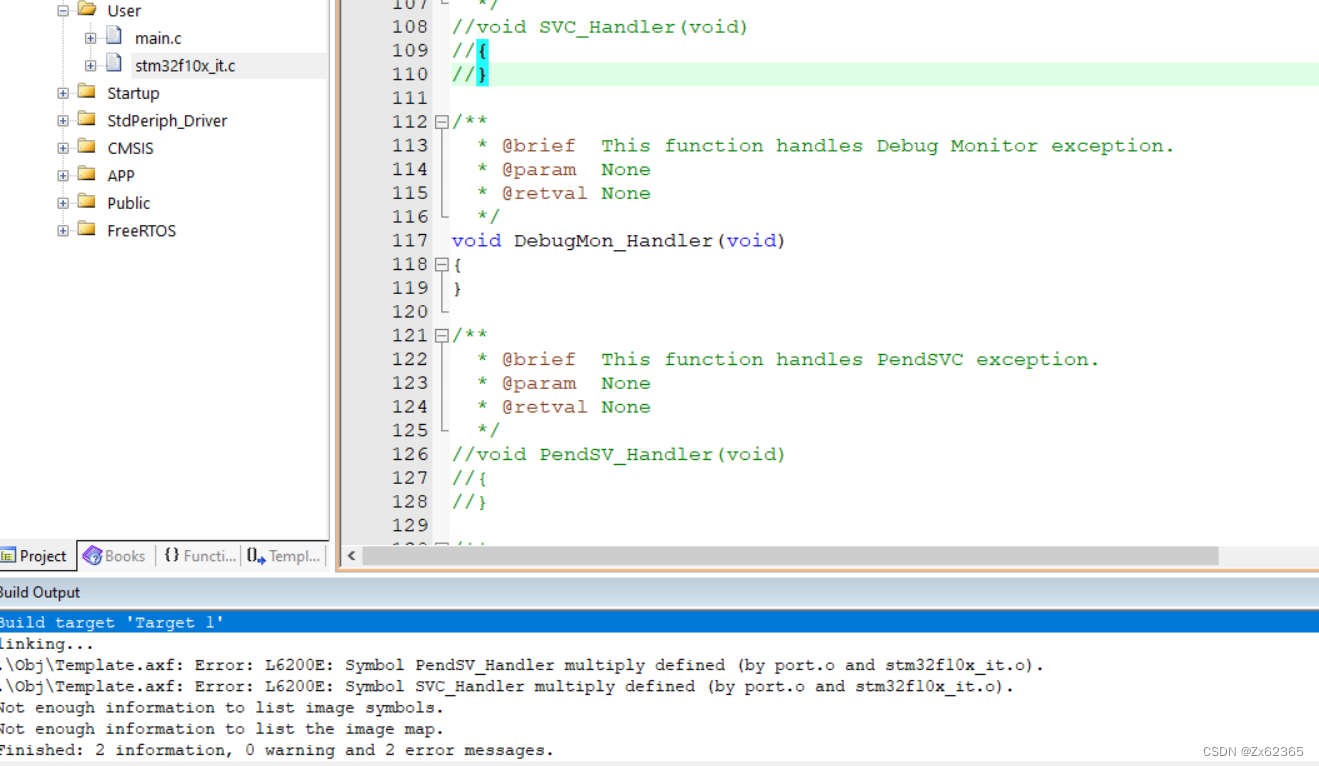
再次编译,错误就消除了。然后我们需要修改系统的延时函数,FreeRTOS不能使用裸机的滴答定时器代码。然后修改stm32f10x_it.c中的系统定时器中断回调函数,调用操作系统已经提供函数实现的回调函数(在port.c的431行)。为保证系统的可靠性可以先加一个判断,在系统运行时再调用(调用操作系统的函数记得先包含头文件)。
extern void xPortSysTickHandler(void);//声明下函数
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//ϵͳÒѾÔËÐÐ
{
xPortSysTickHandler();
}
}附录
FreeRTOSConfig.h
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include "system.h"
#include "usart.h"
//针对不同的编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
//断言
#define vAssertCalled(char,int) printf("Error:%s,%d\r\n",char,int)
#define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__)
/************************************************************************
* FreeRTOS基础配置配置选项
*********************************************************************/
/* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片)
*
* 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。
* 协作式操作系统是任务主动释放CPU后,切换到下一个任务。
* 任务切换的时机完全取决于正在运行的任务。
*/
#define configUSE_PREEMPTION 1
//1使能时间片调度(默认式使能的)
#define configUSE_TIME_SLICING 1
/* 某些运行FreeRTOS的硬件有两种方法选择下一个要执行的任务:
* 通用方法和特定于硬件的方法(以下简称“特殊方法”)。
*
* 通用方法:
* 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。
* 2.可以用于所有FreeRTOS支持的硬件
* 3.完全用C实现,效率略低于特殊方法。
* 4.不强制要求限制最大可用优先级数目
* 特殊方法:
* 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。
* 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。
* 3.比通用方法更高效
* 4.一般强制限定最大可用优先级数目为32
* 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0!
*/
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1
/* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行
* 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决
*
* 下载方法:
* 1.将开发版正常连接好
* 2.按住复位按键,点击下载瞬间松开复位按键
*
* 1.通过跳线帽将 BOOT 0 接高电平(3.3V)
* 2.重新上电,下载
*
* 1.使用FlyMcu擦除一下芯片,然后进行下载
* STMISP -> 清除芯片(z)
*/
#define configUSE_TICKLESS_IDLE 0
/*
* 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk
* Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz,
* 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期;
*/
#define configCPU_CLOCK_HZ (SystemCoreClock)
//RTOS系统节拍中断的频率。即一秒中断的次数,每次中断RTOS都会进行任务调度
#define configTICK_RATE_HZ (( TickType_t )1000)
//可使用的最大优先级
#define configMAX_PRIORITIES (32)
//空闲任务使用的堆栈大小
#define configMINIMAL_STACK_SIZE ((unsigned short)128)
//任务名字字符串长度
#define configMAX_TASK_NAME_LEN (16)
//系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
#define configUSE_16_BIT_TICKS 0
//空闲任务放弃CPU使用权给其他同优先级的用户任务
#define configIDLE_SHOULD_YIELD 1
//启用队列
#define configUSE_QUEUE_SETS 0
//开启任务通知功能,默认开启
#define configUSE_TASK_NOTIFICATIONS 1
//使用互斥信号量
#define configUSE_MUTEXES 0
//使用递归互斥信号量
#define configUSE_RECURSIVE_MUTEXES 0
//为1时使用计数信号量
#define configUSE_COUNTING_SEMAPHORES 0
/* 设置可以注册的信号量和消息队列个数 */
#define configQUEUE_REGISTRY_SIZE 10
#define configUSE_APPLICATION_TASK_TAG 0
/*****************************************************************
FreeRTOS与内存申请有关配置选项
*****************************************************************/
//支持动态内存申请
#define configSUPPORT_DYNAMIC_ALLOCATION 1
//支持静态内存
#define configSUPPORT_STATIC_ALLOCATION 0
//系统所有总的堆大小
#define configTOTAL_HEAP_SIZE ((size_t)(36*1024))
/***************************************************************
FreeRTOS与钩子函数有关的配置选项
**************************************************************/
/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子
*
* 空闲任务钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),
* 这个函数在每个空闲任务周期都会被调用
* 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。
* 因此必须保证空闲任务可以被CPU执行
* 使用空闲钩子函数设置CPU进入省电模式是很常见的
* 不可以调用会引起空闲任务阻塞的API函数
*/
#define configUSE_IDLE_HOOK 0
/* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子
*
*
* 时间片钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )
* 时间片中断可以周期性的调用
* 函数必须非常短小,不能大量使用堆栈,
* 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数
*/
/*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
#define configUSE_TICK_HOOK 0
//使用内存申请失败钩子函数
#define configUSE_MALLOC_FAILED_HOOK 0
/*
* 大于0时启用堆栈溢出检测功能,如果使用此功能
* 用户必须提供一个栈溢出钩子函数,如果使用的话
* 此值可以为1或者2,因为有两种栈溢出检测方法 */
#define configCHECK_FOR_STACK_OVERFLOW 0
/********************************************************************
FreeRTOS与运行时间和任务状态收集有关的配置选项
**********************************************************************/
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 0
//启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 0
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数
* prvWriteNameToBuffer()
* vTaskList(),
* vTaskGetRunTimeStats()
*/
#define configUSE_STATS_FORMATTING_FUNCTIONS 1
/********************************************************************
FreeRTOS与协程有关的配置选项
*********************************************************************/
//启用协程,启用协程以后必须添加文件croutine.c
#define configUSE_CO_ROUTINES 0
//协程的有效优先级数目
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/***********************************************************************
FreeRTOS与软件定时器有关的配置选项
**********************************************************************/
//启用软件定时器
#define configUSE_TIMERS 1
//软件定时器优先级
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
//软件定时器队列长度
#define configTIMER_QUEUE_LENGTH 10
//软件定时器任务堆栈大小
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2)
/************************************************************
FreeRTOS可选函数配置选项
************************************************************/
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 0
//#define INCLUDE_xTaskGetCurrentTaskHandle 1
//#define INCLUDE_uxTaskGetStackHighWaterMark 0
//#define INCLUDE_xTaskGetIdleTaskHandle 0
/******************************************************************
FreeRTOS与中断有关的配置选项
******************************************************************/
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
//系统可管理的最高中断优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/****************************************************************
FreeRTOS与中断服务函数有关的配置选项
****************************************************************/
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
/* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */
#if ( configUSE_TRACE_FACILITY == 1 )
#include "trcRecorder.h"
#define INCLUDE_xTaskGetCurrentTaskHandle 1 // 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)
#endif
#endif /* FREERTOS_CONFIG_H */
延时文件.c
#include "SysTick.h"
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数
//初始化延迟函数
//SYSTICK的时钟固定为AHB时钟,基础例程里面SYSTICK时钟频率为AHB/8
//SYSCLK:系统时钟频率
void SysTick_Init(u8 SYSCLK)
{
u32 reload;
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);//选择外部时钟 HCLK
fac_us=SystemCoreClock/1000000; //不论是否使用OS,fac_us都需要使用
reload=SystemCoreClock/1000000; //每秒钟的计数次数 单位为M
reload*=1000000/configTICK_RATE_HZ; //根据configTICK_RATE_HZ设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合0.233s左右
fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK_RATE_HZ秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
//延时nus
//nus:要延时的us数.
//nus:0~204522252(最大值即2^32/fac_us@fac_us=168)
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
}
//延时nms
//nms:要延时的ms数
//nms:0~65535
void delay_ms(u32 nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
vTaskDelay(nms/fac_ms); //FreeRTOS延时
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
//延时nms,不会引起任务调度
//nms:要延时的ms数
void delay_xms(u32 nms)
{
u32 i;
for(i=0;i<nms;i++) delay_us(1000);
}
stm32f10x_it.c
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main Interrupt Service Routines.
* This file provides template for all exceptions handler and
* peripherals interrupt service routine.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
//void SVC_Handler(void)
//{
//}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
//void PendSV_Handler(void)
//{
//}
extern void xPortSysTickHandler(void);
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
main.c
#include "system.h"
#include "SysTick.h"
#include "led.h"
#include "usart.h"
#include "FreeRTOS.h"
#include "task.h"
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define LED1_TASK_PRIO 2
//任务堆栈大小
#define LED1_STK_SIZE 50
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
//任务优先级
#define LED2_TASK_PRIO 3
//任务堆栈大小
#define LED2_STK_SIZE 50
//任务句柄
TaskHandle_t LED2Task_Handler;
//任务函数
void led2_task(void *pvParameters);
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
int main()
{
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
LED_Init();
USART1_Init(115200);
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED1任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//创建LED2任务
xTaskCreate((TaskFunction_t )led2_task,
(const char* )"led2_task",
(uint16_t )LED2_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED2_TASK_PRIO,
(TaskHandle_t* )&LED2Task_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED1任务函数
void led1_task(void *pvParameters)
{
while(1)
{
LED1=0;
vTaskDelay(200);
LED1=1;
vTaskDelay(800);
}
}
//LED2任务函数
void led2_task(void *pvParameters)
{
while(1)
{
LED2=0;
vTaskDelay(800);
LED2=1;
vTaskDelay(200);
}
}
智能推荐
详解冬奥冠军背后的AI黑科技-程序员宅基地
文章浏览阅读3.6k次。用人工智能普惠体育发展。
form表单提交的几种方式_提交表单-程序员宅基地
文章浏览阅读10w+次,点赞92次,收藏495次。表单提交方式一:直接利用form表单提交html页面代码:<!DOCTYPE html><html><head><meta charset="UTF-8" /><title>Insert title here</title></head><body><form action="h..._提交表单
Unity Spine SkeletonGraphic 动画重复播放 过度残影透明渐变Bug 解决方案_unity skeletongraphic-程序员宅基地
文章浏览阅读5.1k次。Unity Spine SkeletonGraphic 重复播放 过度残影Bug 解决方案不推荐使用SetToSetupPose和Setup Pose相关,代码直接贴上/// <summary>/// Spine播放设置/// </summary>/// <param name="trackIndex">填写0</param>/// <param name="animationName">动画名</param>/// &l_unity skeletongraphic
高斯分布3——边缘概率与条件概率_高斯分布的条件概率-程序员宅基地
文章浏览阅读3.5k次。一、推导过程:二、结果:边缘分布x1,x2 各自依然服从 μi,写反差矩阵 Σii 的多元高斯分布;条件概率分布给定 xj 求 xi 的分布:μi|j=μi+ΣijΣ−1jj(xj−μj)Σi|j=Σjj−ΣTijΣ−1iiΣij..._高斯分布的条件概率
Ratelimitcache: Python缓存库,支持速率限制-程序员宅基地
文章浏览阅读339次,点赞8次,收藏8次。Ratelimitcache: Python缓存库,支持速率限制项目链接: https://gitcode.com/simonw/ratelimitcache?utm_source=artical_gitcode如果你正在寻找一个Python缓存库,并且希望对缓存操作进行速率限制,那么Ratelimitcache可能是你的理想选择。什么是Ratelimitcache?Ratelimitca..._python ratelimit基于什么
【爬虫】Xpath和CSS信息提取的方法异同点_xpath 获取css-程序员宅基地
文章浏览阅读2.3k次,点赞2次,收藏8次。Xpath和CSS信息提取的方法异同点_xpath 获取css
随便推点
基于OFDM+64QAM系统的载波同步matlab仿真,输出误码率,星座图,鉴相器,锁相环频率响应以及NCO等-程序员宅基地
文章浏览阅读454次。正交频分复用(OFDM)是一种在现代通信系统中广泛使用的调制技术,它具有高效的频谱利用和抗多径衰落等特点。64QAM(64-ary Quadrature Amplitude Modulation)是一种调制方式,可以在每个符号中传输更多的位信息。在OFDM系统中,保持载波同步对确保数据传输的可靠性至关重要。_基于ofdm+64qam系统的载波同步matlab仿真,
Springboot毕设项目超市商品销售管理系统37x2w(java+VUE+Mybatis+Maven+Mysql)_vue+springboot+mybatis商品管理系统-程序员宅基地
文章浏览阅读67次。Jdk1.8 + Tomcat8.5 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。若包含,则为maven项目,否则为非maven项目。Springboot毕设项目超市商品销售管理系统37x2w(java+VUE+Mybatis+Maven+Mysql)Springboot + mybatis + Maven + Vue 等等组成,B/S模式 + Maven管理等等。其他版本理论上也可以。_vue+springboot+mybatis商品管理系统
关掉\禁用win7自动配置ipv4地址的方法 默认网关自动消失的解决办法_禁止修改网关命令-程序员宅基地
文章浏览阅读3w次,点赞2次,收藏4次。转载自: http://blog.csdn.net/zouqin369/article/details/6913692 今天去公司设置好IP后,无论怎么样都上不了internet,再次打开本地后发现默认网关自动消失,cmd下输入ipconfig后的现象如下: 物理地址. . . . . . . . . . . . . : 00-22-64-55-76-8F DHCP 已启用_禁止修改网关命令
Extjs4.2 window加载HTML,父子页面html传参_extjs中打开网页怎么传参-程序员宅基地
文章浏览阅读482次。Extjs的窗口是可以加载自己的HTML的,但这样两个页面就相当独立了,传参是个问题 ,网上也没有很好的解答清楚,猫猫今天就说清楚这个模式的传参要点。_extjs中打开网页怎么传参
win系统下根据端口号关闭进程_win port 进程-程序员宅基地
文章浏览阅读811次。win_win port 进程
计算机网络复习——Ch3点到点数据链路层_hdlc go-back-n-程序员宅基地
文章浏览阅读1.2k次。Ch3点到点数据链路层知识点1. 点到点数据链路层要解决的主要问题2. 常见的帧管理(帧定界)方法3. CRC的计算4. 流量控制的基本原理5. 常见错误及其处理机制6. 滑动窗口的概念、形式及工作原理7. ARQ(Automatic Repeat reQuest)协议工作原理:8. 连续ARQ(Go-back-N ARQ)工作原理(特别注意累计确认):9. 选择重传ARQ工作原理10. 了解(高..._hdlc go-back-n