深度学习(七)——Batch Normalization+Pytorch实现_batch normalization pytorch计算-程序员宅基地
简介
Batch Normalization是如今深度学习常见的方法,来加速深层网络训练的收敛,并且有正则化的作用,甚至可以不使用Dropout或者减小神经元被drop的概率。
原理
深度神经网络训练的问题
深度神经网络模型的训练为什么困难、收敛慢?这个问题的解决在之前的工作中,有从尝试新的激活函数角度,如 ReLU、Maxout、PReLU等;有从权值初始化方法角度,如Xavier初始化、Kaiming初始化等,但收益相对都不是很高。
这个问题的存在使得在设置 learning rate、初始化方法还有激活函数上得要很慎重,而这个问题的实质是因为在训练过程中,随着前一层参数的改变,哪怕很小的改变,也会因为网络加深而被放大,而这种改变使得每一层输入的分布发生改变,从而每一层需要持续地适应这种改变,这种现象在论文中被称为 Internal covariate shift (ICS,内部协变量偏移)。
从另外一个角度看,把网络的中间层看作是 sub-network 以及采用 sigmoid 激活函数 z = g ( W u + b ),其中 u 是该层的输入,而 W 和 b 是学习的参数。随着 ∣ x ∣ 增大,g ′ ( x ) 趋向于0,这也就意味着会发生我们熟知的梯度消失(本质是落入饱和区),后来 ReLU 和 一些初始化方法是较好的缓解了这个问题。
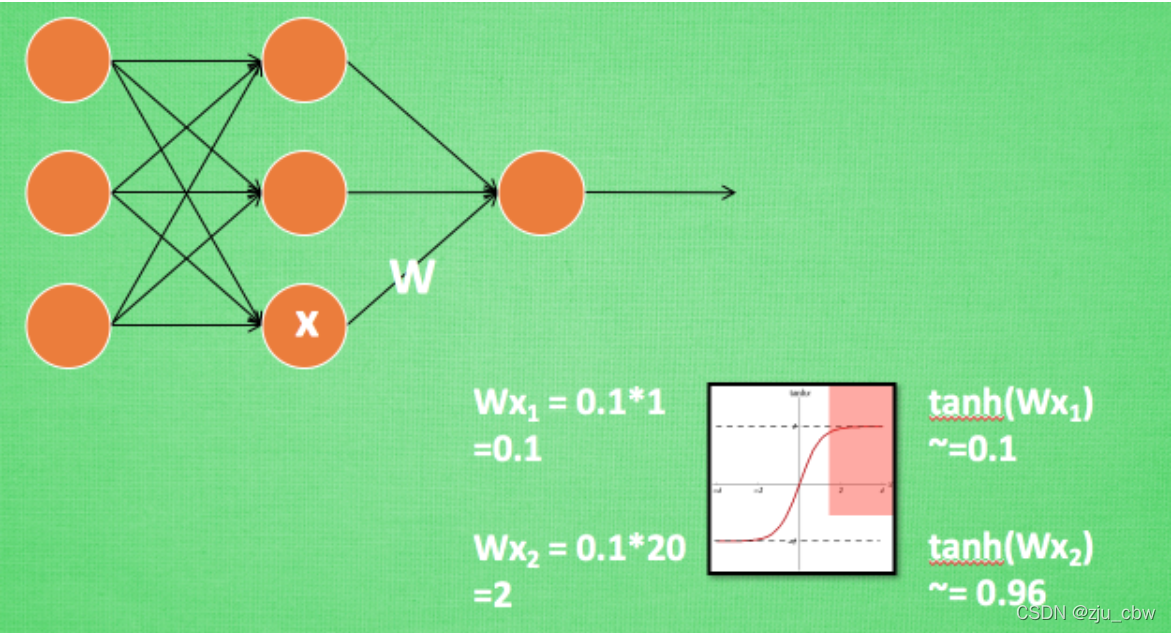
换一个思路想,造成这个问题比较直观的原因是因为 ∣ x ∣ 的增大,即输入分布的变化,以及上面提到的 ICS 现象也是因为每一层的输入分布发生改变,那么很自然的想法就是,如果能确保输入的分布稳定,那么就不容易陷入饱和区域,从而梯度消失的问题也就得到很好的缓和,训练收敛的速度也随之提升了,问题就迎刃而解了。
看着好像蛮简单的,但还是有随之而来的问题:
- 确保输入的分布稳定,即 Normalization ,该怎么做?
- Normalization 能使得输入不落入饱和区域,反过来就是限制输入落入激活函数的线性区域,那这样网络不就失去了非线性的表达能力了吗,这该怎么弥补?
上面的两个也就是 Batch Normalization 这篇论文工作的核心。
解决方法
白化(whitening) 作为一个很重要的数据预处理方法,它能使得模型训练收敛的更快,而白化一般包含两个目的:
- 去除特征之间的相关性(特征独立);
- 使得所有特征具有相同的均值和方差(同分布)
白化可以使得模型的输入标准化为均值为0,方差为1,那可以考虑将白化拓展到每一层的输入,就能使得每一层的分布趋于稳定。然而,标准的白化操作代价昂贵,特别是我们还希望白化操作是可微的,保证白化操作可以通过反向传播来更新梯度,即:

于是就有了本篇论文的工作,Batch Normalization(BN),即对白化做了简化,将其作用到每一层的输入,使得输入分布稳定。
第一个简化是只对每一个特征维度做 Normalization,并没有考虑特征之间去相关,论文中也提到了,“such normalization speeds up convergence, even when the features are not decorrelated.”,即:

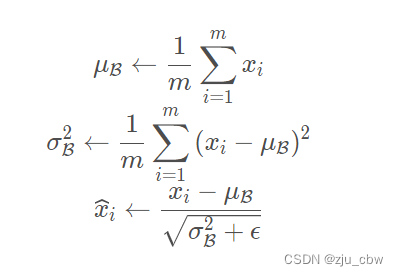
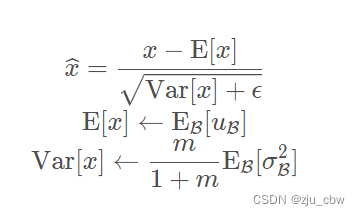
第二个简化是不通过整个数据集来统计 E[x(k)] 和 Var[x(k)] 和而是通过一个 mini-batch 内的激活值来估计均值和方差 ,得到:
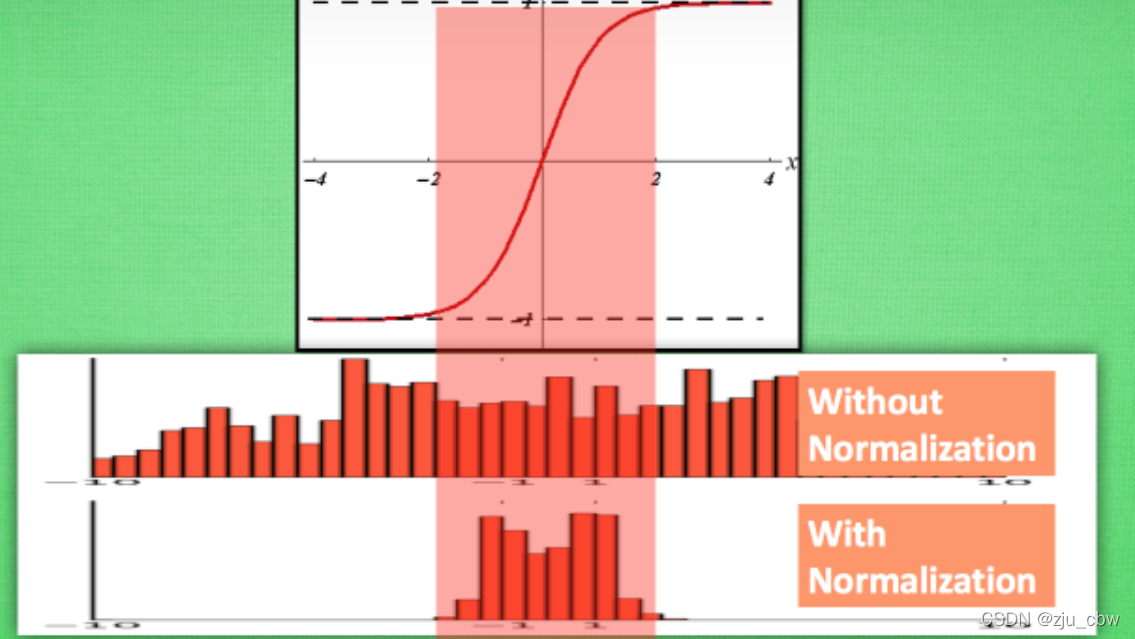
而这样的 Normalization 是存在问题的,如论文中提到 “simply normalizing each input of a layer may change what the layer can represent.”,即简单地做 Normalization 会减低了网络的非线性的表达能力,比如采用 sigmoid 激活函数,normalization 会限制激活值落入到线性区域(近似线性),而这片区域是近似 [-2, 2] 这个区间,而在标准正态分布中,落入 [-2, 2] 的概率是95%。
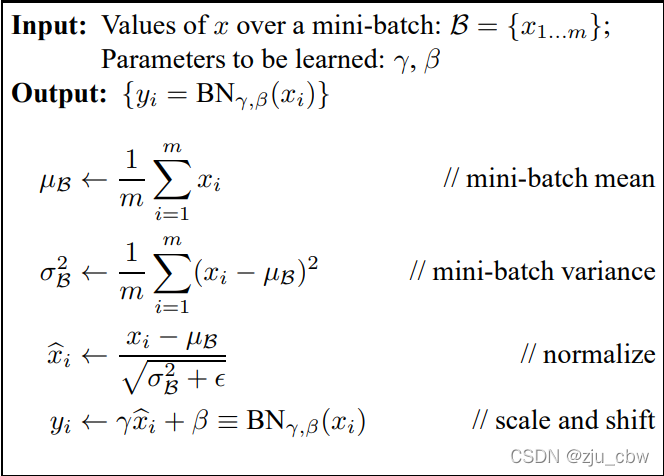
这也就前面提到问题,作者采用的方式是 “make sure that the transformation inserted in the network can represent the identity transform”,为了实现这种可以恒等变换,引入了两个可学习的参数 γ(k) 和 β(k),使得:

而在最极端的情况下,学习的两个参数分别为

,则可以恢复到原先的激活值,即恢复了网络的表达能力(restore the representation power of the network)。
Batch Normalization 大致的算法过程如下:
BN 采用 mini-batch 来估计均值和方差,这在训练的时候是可行的,但在 inference 或 online inference 时,是单实例的,不存在 mini-batch,所以就无法获得BN计算所需的均值和方差,这就需要利用训练阶段的Batch统计值,估计一个总体的均值和方差,从而实现 inference 阶段的 normalization:
值得注意的是,在PyTorch代码实现的时候,会去采用指数滑动平均(Exponential Moving Average)来实现总体的估计,见PyTorch文档描述:

更高的学习率
在论文摘要部分提到了,“Batch Normalization allows us to use much higher learning rates and be less careful about initialization.”,在还没看正文时,就有疑问,为什么 BN 可以使得采用更大的学习率?作者专门在一小节中对其进行了解释。
通常在训练深层网络,不会使用太大的学习率,因为它易导致梯度爆炸、梯度消失或者陷入到 poor local minima。而前面也提到,BN 能够一定程度上避免输入落入到激活函数的饱和区域,缓解了梯度消失的问题;另外因为每层输入都有 normalization 的存在,缓解了 ICS 的存在,使得每层的输入分布稳定,参数的变化(反向传播的梯度)也趋于稳定(不会因为随着层数加深,参数变化被放大),较好地缓解了梯度爆炸。
论文中称 “Batch Normalization also makes training more resilient to parameter scale” ,并对这种参数更新(梯度)的稳定做了一个分析。因为通常,较大的学习率会使得参数的规模增大(increase the scale of layer parameters),假设增大了 a 倍,但因为 BN 的存在,反向传播并不会受到参数增大的影响,从而导致的梯度爆炸:

第三个式子还能看到,更大的参数返回会导致更小的梯度,从而上面的结论也得到了验证:BN 的存在,使得参数变化趋于稳定,故能使用更大的学习率。
正则化
在论文的摘要中提到因为 BN 的存在,使得 Dropout 可以被移除或者减小神经元被 drop 的概率,换句话说,BN 具备了 dropout 提升模型泛化能力(缓解过拟合)的功能,主要是因为通过 batch 内的激活值估计均值和方差,不是根据单一 sample 的值做模型优化,这可以变相地看成是某一种约束。
这边有三点需要注意的是:
- 论文中讨论将BN放在激活函数前好还是后好,“but since u is likely the output of another nonlinearity, the shape of its distribution is likely to change during training, and constraining its first and second moments would not eliminate the covariate shift.”,不是很明白,而 [1] 中提到 “不少研究表明将BN放在激活函数之后效果更好。” ,但并没有给出参考文献,这里还需后面验证。
- 对于卷积层,在估计均值和方差时考虑的神经元激活值集合并不是标量特征,而是一个 feature map 内的特征值,“we jointly normalize all the activations in a mini-batch over all locations. In Alg. 1, we let B be the set of all values in a feature map across both the elements of a mini-batch and spatial locations”
- 在 Normalization 前的线性变换 W u + b ,通常会省略掉偏置项 b ,因为它的作用会被随后BN的均值给抵消掉(它的作用会被 β 代替)。
实验
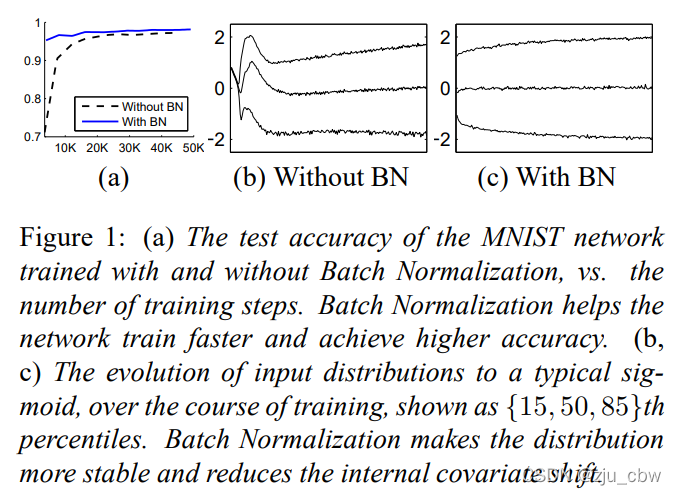
作者通过一个很简单的实验来验证BN是否能较好的缓解ICS问题。在MNIST数据集上,一个简单的三层的神经网络,在每一层之前加入BN,观察收敛速度和每层的输入分布变化,结果如下图:
另外一个实验就是在 ImageNet Classification 任务上,实验的模型结构在 Inception-v1 上做的改进是参考 VGG 中小尺寸的卷积核的思想,将 5×5 的卷积核替换为 两层 3 × 3 的卷积核,并且加宽了网络和引入了BN,另外值得注意的是,在Inception-v2的网络结构设计中,用 stride=2 代替了 Inception-v1 中 max pool 做 feature map 的尺寸缩减。
为了进一步加速 BN networks 训练收敛的速度,作者进一步改进了网络和训练的超参数:
- Increase learning rate:在上面也提到了可以使用更大的学习率,那么增大学习率来加快模型训练;
- Remove dropout:前面同样提到 BN 能一定程度缓解过拟合,那就将 dropout 移除来提速;
- Reduce the L 2 weight regularization:减少 L2 正则项的权值;
- Accelerate the learning rate decay:因为 BN 加快了模型的训练,所以相应的学习率的衰减也得加快,这里采用了指数衰减;
- Remove Local Response Normalization:这里是移除了 LRN,其实在之前的一些工作中就不用它了;
- Shuffle training examples more thoroughly
- Reduce the photometric distortions
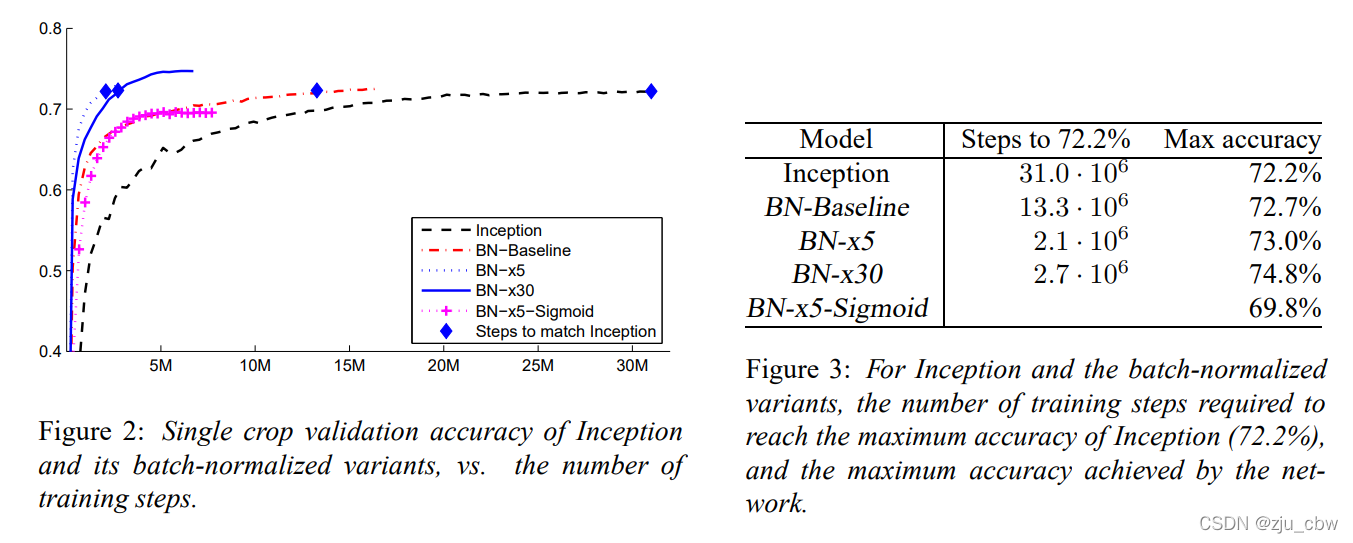
另外,作者还做了一些调整,设置了几个模型: - BN-Baseline:即相较于 Inception-v1 引入了 BN;
- BN-x5:将学习率增大了5倍,为0.0075
- BN-x30:将学习率增大了30倍,为0.045
- BN-x5-Sigmoid:和 BN-x5 类似,但激活函数换成了Sigmoid。
下面是实验的结果,可以看到仅采用 BN 的Baselin 其收敛速度是快于 Inception v1,另外 BN-x5 更是快了14倍(达到Inception 的准确率),而虽 BN-x30 较之 BN-x5 会慢一些,但其准确率是最高的。有意思的是,论文中还玩了一个小小的文字游戏:we apply Batch Normalization to the bestperforming ImageNet classification network, and show that we can match its performance using only 7% of the training steps, and can further exceed its accuracy by a substantial margin. ,其实这里 7% 是由 BN-x5 实现的,而 BN-x30 是在准确率上做了提升。
Pytorch实现
下面将Batch Normalization加入到GoogleNet中,并将5x5的卷积核用2个2x2的卷积核代替。
从http://download.tensorflow.org/example_images/flower_photos.tgz下载数据集
执行下面代码,将数据集划分为训练集与验证集。
split_data.py
import os
from shutil import copy
import random
def mkfile(file):
if not os.path.exists(file):
os.makedirs(file)
file = 'flower_data/flower_photos'
flower_class = [cla for cla in os.listdir(file) if ".txt" not in cla]
mkfile('flower_data/train')
for cla in flower_class:
mkfile('flower_data/train/'+cla)
mkfile('flower_data/val')
for cla in flower_class:
mkfile('flower_data/val/'+cla)
split_rate = 0.1
for cla in flower_class:
cla_path = file + '/' + cla + '/'
images = os.listdir(cla_path)
num = len(images)
eval_index = random.sample(images, k=int(num*split_rate))
for index, image in enumerate(images):
if image in eval_index:
image_path = cla_path + image
new_path = 'flower_data/val/' + cla
copy(image_path, new_path)
else:
image_path = cla_path + image
new_path = 'flower_data/train/' + cla
copy(image_path, new_path)
print("\r[{}] processing [{}/{}]".format(cla, index+1, num), end="") # processing bar
print()
print("processing done!")
model.py
import torch.nn as nn
import torch
import torch.nn.functional as F
class GoogLeNet(nn.Module):
def __init__(self, num_classes=1000, aux_logits=True, init_weights=False):
super(GoogLeNet, self).__init__()
self.aux_logits = aux_logits
self.conv1 = BasicConv2d(3, 64, kernel_size=7, stride=2, padding=3)
self.maxpool1 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.conv2 = BasicConv2d(64, 64, kernel_size=1)
self.conv3 = BasicConv2d(64, 192, kernel_size=3, padding=1)
self.maxpool2 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception3a = Inception(192, 64, 96, 128, 16, 32, 32)
self.inception3b = Inception(256, 128, 128, 192, 32, 96, 64)
self.maxpool3 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception4a = Inception(480, 192, 96, 208, 16, 48, 64)
self.inception4b = Inception(512, 160, 112, 224, 24, 64, 64)
self.inception4c = Inception(512, 128, 128, 256, 24, 64, 64)
self.inception4d = Inception(512, 112, 144, 288, 32, 64, 64)
self.inception4e = Inception(528, 256, 160, 320, 32, 128, 128)
self.maxpool4 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception5a = Inception(832, 256, 160, 320, 32, 128, 128)
self.inception5b = Inception(832, 384, 192, 384, 48, 128, 128)
if self.aux_logits:
self.aux1 = InceptionAux(512, num_classes)
self.aux2 = InceptionAux(528, num_classes)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.dropout = nn.Dropout(0.4)
self.fc = nn.Linear(1024, num_classes)
if init_weights:
self._initialize_weights()
def forward(self, x):
# N x 3 x 224 x 224
x = self.conv1(x)
# N x 64 x 112 x 112
x = self.maxpool1(x)
# N x 64 x 56 x 56
x = self.conv2(x)
# N x 64 x 56 x 56
x = self.conv3(x)
# N x 192 x 56 x 56
x = self.maxpool2(x)
# N x 192 x 28 x 28
x = self.inception3a(x)
# N x 256 x 28 x 28
x = self.inception3b(x)
# N x 480 x 28 x 28
x = self.maxpool3(x)
# N x 480 x 14 x 14
x = self.inception4a(x)
# N x 512 x 14 x 14
if self.training and self.aux_logits: # eval model lose this layer
aux1 = self.aux1(x)
x = self.inception4b(x)
# N x 512 x 14 x 14
x = self.inception4c(x)
# N x 512 x 14 x 14
x = self.inception4d(x)
# N x 528 x 14 x 14
if self.training and self.aux_logits: # eval model lose this layer
aux2 = self.aux2(x)
x = self.inception4e(x)
# N x 832 x 14 x 14
x = self.maxpool4(x)
# N x 832 x 7 x 7
x = self.inception5a(x)
# N x 832 x 7 x 7
x = self.inception5b(x)
# N x 1024 x 7 x 7
x = self.avgpool(x)
# N x 1024 x 1 x 1
x = torch.flatten(x, 1)
# N x 1024
x = self.dropout(x)
x = self.fc(x)
# N x 1000 (num_classes)
if self.training and self.aux_logits: # eval model lose this layer
return x, aux2, aux1
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
#inception结构
class Inception(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj):
super(Inception, self).__init__()
self.branch1 = BasicConv2d(in_channels, ch1x1, kernel_size=1)
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, padding=1) # 保证输出大小等于输入大小
)
self.branch3 = nn.Sequential(
BasicConv2d(in_channels, ch5x5red, kernel_size=1),
BasicConv2d(ch5x5red, ch5x5, kernel_size=3, padding=1),
BasicConv2d(ch5x5, ch5x5, kernel_size=3, padding=1) # 保证输出大小等于输入大小
)
self.branch4 = nn.Sequential(
nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
BasicConv2d(in_channels, pool_proj, kernel_size=1)
)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
#辅助分类器
class InceptionAux(nn.Module):
def __init__(self, in_channels, num_classes):
super(InceptionAux, self).__init__()
self.averagePool = nn.AvgPool2d(kernel_size=5, stride=3)
self.conv = BasicConv2d(in_channels, 128, kernel_size=1) # output[batch, 128, 4, 4]
self.fc1 = nn.Linear(2048, 1024)
self.fc2 = nn.Linear(1024, num_classes)
def forward(self, x):
# aux1: N x 512 x 14 x 14, aux2: N x 528 x 14 x 14
x = self.averagePool(x)
# aux1: N x 512 x 4 x 4, aux2: N x 528 x 4 x 4
x = self.conv(x)
# N x 128 x 4 x 4
x = torch.flatten(x, 1)
x = F.dropout(x, 0.5, training=self.training)
# N x 2048
x = F.relu(self.fc1(x), inplace=True)
x = F.dropout(x, 0.5, training=self.training)
# N x 1024
x = self.fc2(x)
# N x num_classes
return x
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, **kwargs)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
train.py
import torch
import torch.nn as nn
from torchvision import transforms, datasets
import torchvision
import json
import matplotlib.pyplot as plt
import os
import torch.optim as optim
from model import GoogLeNet
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]),
"val": transforms.Compose([transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])}
#data_root = os.path.abspath(os.path.join(os.getcwd(), "../..")) # get data root path
data_root = os.getcwd()
image_path = data_root + "/flower_data/" # flower data set path
train_dataset = datasets.ImageFolder(root=image_path + "train",
transform=data_transform["train"])
train_num = len(train_dataset)
# {'daisy':0, 'dandelion':1, 'roses':2, 'sunflower':3, 'tulips':4}
flower_list = train_dataset.class_to_idx
cla_dict = dict((val, key) for key, val in flower_list.items())
# write dict into json file
json_str = json.dumps(cla_dict, indent=4)
with open('class_indices.json', 'w') as json_file:
json_file.write(json_str)
batch_size = 32
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size, shuffle=True,
num_workers=0)
validate_dataset = datasets.ImageFolder(root=image_path + "val",
transform=data_transform["val"])
val_num = len(validate_dataset)
validate_loader = torch.utils.data.DataLoader(validate_dataset,
batch_size=batch_size, shuffle=False,
num_workers=0)
# test_data_iter = iter(validate_loader)
# test_image, test_label = test_data_iter.next()
# net = torchvision.models.googlenet(num_classes=5)
# model_dict = net.state_dict()
# pretrain_model = torch.load("googlenet.pth")
# del_list = ["aux1.fc2.weight", "aux1.fc2.bias",
# "aux2.fc2.weight", "aux2.fc2.bias",
# "fc.weight", "fc.bias"]
# pretrain_dict = {k: v for k, v in pretrain_model.items() if k not in del_list}
# model_dict.update(pretrain_dict)
# net.load_state_dict(model_dict)
net = GoogLeNet(num_classes=5, aux_logits=True, init_weights=True)
net.to(device)
loss_function = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.0015)
scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=1500, gamma=0.1) # 权重衰减策略
best_acc = 0.0
save_path = './googleNet.pth'
for epoch in range(30):
# train
net.train()
running_loss = 0.0
for step, data in enumerate(train_loader, start=0):
images, labels = data
optimizer.zero_grad()
logits, aux_logits2, aux_logits1 = net(images.to(device))
loss0 = loss_function(logits, labels.to(device))
loss1 = loss_function(aux_logits1, labels.to(device))
loss2 = loss_function(aux_logits2, labels.to(device))
loss = loss0 + loss1 * 0.3 + loss2 * 0.3
loss.backward()
optimizer.step()
scheduler.step()
# print statistics
running_loss += loss.item()
# print train process
rate = (step + 1) / len(train_loader)
a = "*" * int(rate * 50)
b = "." * int((1 - rate) * 50)
print("\rtrain loss: {:^3.0f}%[{}->{}]{:.3f}".format(int(rate * 100), a, b, loss), end="")
print()
# validate
net.eval()
acc = 0.0 # accumulate accurate number / epoch
with torch.no_grad():
for val_data in validate_loader:
val_images, val_labels = val_data
outputs = net(val_images.to(device)) # eval model only have last output layer
predict_y = torch.max(outputs, dim=1)[1]
acc += (predict_y == val_labels.to(device)).sum().item()
val_accurate = acc / val_num
if val_accurate > best_acc:
best_acc = val_accurate
torch.save(net.state_dict(), save_path)
print('[epoch %d] train_loss: %.3f test_accuracy: %.3f' %
(epoch + 1, running_loss / step, val_accurate))
print('Finished Training')
Output:
predict.py
import torch
from model import GoogLeNet
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
import json
import os
os.environ["KMP_DUPLICATE_LIB_OK"]="TRUE"
data_transform = transforms.Compose(
[transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# load image
img = Image.open("./sunflower.jpg")
plt.imshow(img)
# [N, C, H, W]
img = data_transform(img)
# expand batch dimension
img = torch.unsqueeze(img, dim=0)
# read class_indict
try:
json_file = open('./class_indices.json', 'r')
class_indict = json.load(json_file)
except Exception as e:
print(e)
exit(-1)
# create model
model = GoogLeNet(num_classes=5, aux_logits=False)
# load model weights
model_weight_path = "./googleNet.pth"
missing_keys, unexpected_keys = model.load_state_dict(torch.load(model_weight_path), strict=False)
model.eval()
with torch.no_grad():
# predict class
output = torch.squeeze(model(img))
predict = torch.softmax(output, dim=0)
predict_cla = torch.argmax(predict).numpy()
print(class_indict[str(predict_cla)])
plt.show()
Output:
智能推荐
oracle 12c 集群安装后的检查_12c查看crs状态-程序员宅基地
文章浏览阅读1.6k次。安装配置gi、安装数据库软件、dbca建库见下:http://blog.csdn.net/kadwf123/article/details/784299611、检查集群节点及状态:[root@rac2 ~]# olsnodes -srac1 Activerac2 Activerac3 Activerac4 Active[root@rac2 ~]_12c查看crs状态
解决jupyter notebook无法找到虚拟环境的问题_jupyter没有pytorch环境-程序员宅基地
文章浏览阅读1.3w次,点赞45次,收藏99次。我个人用的是anaconda3的一个python集成环境,自带jupyter notebook,但在我打开jupyter notebook界面后,却找不到对应的虚拟环境,原来是jupyter notebook只是通用于下载anaconda时自带的环境,其他环境要想使用必须手动下载一些库:1.首先进入到自己创建的虚拟环境(pytorch是虚拟环境的名字)activate pytorch2.在该环境下下载这个库conda install ipykernelconda install nb__jupyter没有pytorch环境
国内安装scoop的保姆教程_scoop-cn-程序员宅基地
文章浏览阅读5.2k次,点赞19次,收藏28次。选择scoop纯属意外,也是无奈,因为电脑用户被锁了管理员权限,所有exe安装程序都无法安装,只可以用绿色软件,最后被我发现scoop,省去了到处下载XXX绿色版的烦恼,当然scoop里需要管理员权限的软件也跟我无缘了(譬如everything)。推荐添加dorado这个bucket镜像,里面很多中文软件,但是部分国外的软件下载地址在github,可能无法下载。以上两个是官方bucket的国内镜像,所有软件建议优先从这里下载。上面可以看到很多bucket以及软件数。如果官网登陆不了可以试一下以下方式。_scoop-cn
Element ui colorpicker在Vue中的使用_vue el-color-picker-程序员宅基地
文章浏览阅读4.5k次,点赞2次,收藏3次。首先要有一个color-picker组件 <el-color-picker v-model="headcolor"></el-color-picker>在data里面data() { return {headcolor: ’ #278add ’ //这里可以选择一个默认的颜色} }然后在你想要改变颜色的地方用v-bind绑定就好了,例如:这里的:sty..._vue el-color-picker
迅为iTOP-4412精英版之烧写内核移植后的镜像_exynos 4412 刷机-程序员宅基地
文章浏览阅读640次。基于芯片日益增长的问题,所以内核开发者们引入了新的方法,就是在内核中只保留函数,而数据则不包含,由用户(应用程序员)自己把数据按照规定的格式编写,并放在约定的地方,为了不占用过多的内存,还要求数据以根精简的方式编写。boot启动时,传参给内核,告诉内核设备树文件和kernel的位置,内核启动时根据地址去找到设备树文件,再利用专用的编译器去反编译dtb文件,将dtb还原成数据结构,以供驱动的函数去调用。firmware是三星的一个固件的设备信息,因为找不到固件,所以内核启动不成功。_exynos 4412 刷机
Linux系统配置jdk_linux配置jdk-程序员宅基地
文章浏览阅读2w次,点赞24次,收藏42次。Linux系统配置jdkLinux学习教程,Linux入门教程(超详细)_linux配置jdk
随便推点
matlab(4):特殊符号的输入_matlab微米怎么输入-程序员宅基地
文章浏览阅读3.3k次,点赞5次,收藏19次。xlabel('\delta');ylabel('AUC');具体符号的对照表参照下图:_matlab微米怎么输入
C语言程序设计-文件(打开与关闭、顺序、二进制读写)-程序员宅基地
文章浏览阅读119次。顺序读写指的是按照文件中数据的顺序进行读取或写入。对于文本文件,可以使用fgets、fputs、fscanf、fprintf等函数进行顺序读写。在C语言中,对文件的操作通常涉及文件的打开、读写以及关闭。文件的打开使用fopen函数,而关闭则使用fclose函数。在C语言中,可以使用fread和fwrite函数进行二进制读写。 Biaoge 于2024-03-09 23:51发布 阅读量:7 ️文章类型:【 C语言程序设计 】在C语言中,用于打开文件的函数是____,用于关闭文件的函数是____。
Touchdesigner自学笔记之三_touchdesigner怎么让一个模型跟着鼠标移动-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏13次。跟随鼠标移动的粒子以grid(SOP)为partical(SOP)的资源模板,调整后连接【Geo组合+point spirit(MAT)】,在连接【feedback组合】适当调整。影响粒子动态的节点【metaball(SOP)+force(SOP)】添加mouse in(CHOP)鼠标位置到metaball的坐标,实现鼠标影响。..._touchdesigner怎么让一个模型跟着鼠标移动
【附源码】基于java的校园停车场管理系统的设计与实现61m0e9计算机毕设SSM_基于java技术的停车场管理系统实现与设计-程序员宅基地
文章浏览阅读178次。项目运行环境配置:Jdk1.8 + Tomcat7.0 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。项目技术:Springboot + mybatis + Maven +mysql5.7或8.0+html+css+js等等组成,B/S模式 + Maven管理等等。环境需要1.运行环境:最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。_基于java技术的停车场管理系统实现与设计
Android系统播放器MediaPlayer源码分析_android多媒体播放源码分析 时序图-程序员宅基地
文章浏览阅读3.5k次。前言对于MediaPlayer播放器的源码分析内容相对来说比较多,会从Java-&amp;gt;Jni-&amp;gt;C/C++慢慢分析,后面会慢慢更新。另外,博客只作为自己学习记录的一种方式,对于其他的不过多的评论。MediaPlayerDemopublic class MainActivity extends AppCompatActivity implements SurfaceHolder.Cal..._android多媒体播放源码分析 时序图
java 数据结构与算法 ——快速排序法-程序员宅基地
文章浏览阅读2.4k次,点赞41次,收藏13次。java 数据结构与算法 ——快速排序法_快速排序法