”Lidar“ 的搜索结果
[科普]一文看懂激光雷达LIDAR基本工作原理
机载激光扫描( Light Detection and Ranging) 技术作为新兴的现代化测量技术,目前广泛用于测绘的各个领域 中,对其数据标准格式( LAS 格式...LiDAR 点云数据的三维可视化,为后期对数据和影像的进一步研究打下了基础。
作者|牛牛牛肉饭 编辑|汽车人原文链接:https://zhuanlan.zhihu.com/p/660216714点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷干货,即可获取点击...高阶ADAS方案量产了吗?新的文章和实验进展又是否顺利呢?今...
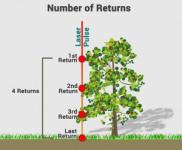
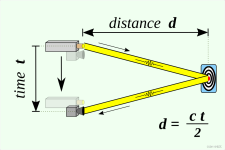
LiDAR是一种主动式遥感技术,通过发射激光束并记录返回的反射信号来测量目标物体的距离、位置和形状。这项技术通常使用激光器来产生短脉冲激光,然后通过接收器接收反射回来的光信号。通过测量激光的时间飞行和接收...
使用3D-3D点对应关系的LiDAR相机校准 , ( ,毗湿 南(Vishnu Radhakrishnan),克里希纳(Krishna) ROS封装,用于校准相机和LiDAR。 该软件包用于通过相机校准LiDAR(配置为支持Hesai和Velodyne硬件)(适用于...
用于基于图像的3D对象检测的端到端伪LiDAR 该论文已被《计算机视觉与模式识别2020》所接受。 作者: , , , , , , , 和 引文@inproceedings{qian2020end, title={End-to-End Pseudo-LiDAR for Image-Based 3D ...
LI-Calib是用于校准6DoF刚性变换和3D LiDAR与IMU之间的时间偏移的工具包。它基于连续时间的批次优化。基于IMU的成本和LiDAR点到surfel距离共同最小化,这使得校准问题在一般情况下受到了很好的约束。 先决条件 ...
由瑞士苏黎世联邦理工大学自动驾驶实验室开发的lidar_align标定
运行以下命令以在ros_workspace/src目录中克隆lidar_camera_calibration软件包。 cd ~/ros_workspace/src git clone https://github.com/heethesh/lidar_camera_calibration cd ~/ros_workspace/ catkin_make ...
Camera-LiDAR校准手册 该解决方案提供了一种手动校准Livox LiDAR与摄像机之间的外部参数的方法,该方法已在Mid-40,Horizon和Tele-15系列上得到验证。 它包括相机固有参数的校准,校准数据的获取,相机与LiDAR...
lidar360 2.2版本软件下载
lidar_camera_calib仅供学习参考使用。[TOC]1.基本思想提取图像上标定板的像素坐标,在对应的激光帧中提取标定板的3D角点位置,解决一个2D-3D算Rt的问题.图像上提取角点用 ,激光数据中提标定板参考,这个方法对标定板...
MUUFL湾港高光谱和LiDAR数据收集文件 校园1图像的MUUFL Gulfport高光谱数据场景标签 在GoogleEarth KML中标记了此场景的带有地理标签的照片和目标地面的真实位置 公牛目标检测得分码 注意:如果在任何出版物或演示...
多激光雷达标定,配准。基于NDT算法的多激光雷达外参标定的方法和实践。 工程代码是在ROS中间件下完成的。 内涵详细的算法说明和编码流程。 使用的编码语言为C++. 关于激光雷达标定的其他资源: ...
lidar_imu_calib 概述 在基于3D激光雷达的slam开发中,我们经常使用imu为匹配算法(icp,ndt)提供先验,因此需要校准激光雷达和imu之间的变换。对于匹配算法,transfom中的姿态比变换中的位置更重要,并且通常将...
该套件用于通过单眼相机校准2D LiDAR或激光测距仪(LRF)。 特别是,Hokuyo UTM-30LX已成功通过单反相机进行了校准。 但是这种方法实际上是一种幼稚的方法,总之,它只是3D-2D优化问题。 因此,我们决定开发一种新...
给出了一种三角形形变量的定义,并提出了基于不规则三角网(TIN)的LiDAR数据边缘检测新方法。将点LiDAR数据进行三角剖分,生成不规则三角网,计算TIN中每个三角形的形变量,根据三角形形变量的不同来确定处于地物目标...
LIDAR-Lite-Fritzing-Part LIDAR-Lite Fritzing 零件在行动! Frizzing 是一个免费、开源且易于使用的可视化和原型原理图布局编辑器。 该存储库包含一个 LIDAR-Lite Fritzing 零件,用于您的草图。 在此处了解有关 ...
USGS 3DEP LiDAR点云内容这个AWS Public Dataset项目是关于将USGS 3DEP LiDAR点云数据处理成对云友好,可流式传输,无损且方便的形式。 该项目在AWS上的主要登录页面为 AWS上有两种形式的公共3DEP LiDAR数据可用: ...
LiDAR 的指南,包括应用程序、库和工具,可让您更好、更高效地进行 LiDAR 开发。 注意:您可以使用这个方便的扩展名轻松地将此 Markdown 文件转换为 PDF。 目录 激光雷达学习资源 激光雷达工具和框架 是一种用于创建...
成功的自动驾驶汽车必定将使用紧密集成的传感器系统来达到...本文将介绍与LIDAR有关的主要设计考量,LIDAR是一种传感器,为各种自动驾驶解决方案提供大量数据。 图1.蛛网图,比较视觉、雷达和LIDAR。 在自动驾驶汽
数据融合matlab代码用于高光谱和LiDAR分类的分层随机行走网络 本示例实现了本文的综述[使用分层随机游走和深度CNN架构对高光谱和LiDAR数据进行联合分类] 使用分层随机游走和深层CNN架构的高光谱和LiDAR数据的联合...
LiDAR360激光雷达点云数据处理软件用户手册,完整版,中文。
LINS--LiDAR惯性SLAM该存储库包含用于与ROS兼容的UGV紧密耦合的激光雷达惯性测距和映射系统的代码。在紧密耦合方案中融合IMU和Lidar的原因是要处理以前的方法可能会失败的无特征的环境。这项工作建立在LIO映射,乐高...
该代码提供了使用距离图像作为中间表示来训练和部署LiDAR扫描语义分割的代码。 培训管道可以在找到。 我们将尽快开源部署管道。 预训练模型 squeezesegV2 + crf darknet21 暗网53 暗网53-1024 暗网53-512 要...
由于全固态LiDAR内部没有任何宏观或微观上的运动部件,耐久性和可靠性的优势不言而喻,且顺应了自动驾驶对LiDAR固态化、小型化和低成本化的趋势,因此成为车用激光雷达的趋势。下面就按照不同的固态激光雷达技术做...
LiDAR360地基林业教程.pdf
标签: 点云
这个软件是一个用于3D建模的重要软件,LIDAR360是一个非常好用的软件,功能也很强大,但是寻找这个软件教程非常麻烦,所以我在此分享出来,供大家学习参考。
(2020-03-06)RS-Lidar-32_User_Guide_v2.3.3_CN.pdf
推荐文章
- C++零碎知识点(一)-程序员宅基地
- 【Python学习笔记】Coursera课程《Python Data Structures》 密歇根大学 Charles Severance——Week5 Dictionary课堂笔记...-程序员宅基地
- v-html 解析字符串到 html 换行显示_html字符串 v-html-程序员宅基地
- 招收跨专业考计算机的学校,跨专业考研,接受跨专业考研的学校。-程序员宅基地
- 数学模型预测模型_改进著名的nfl预测模型-程序员宅基地
- ELK-FileBeat入门_filebeat 6.5.4 - windows-程序员宅基地
- 微信小程序架构图与开发_微信小程序框架图-程序员宅基地
- Node.js 下载与安装教程_node下载-程序员宅基地
- MySQL报错:The server time zone value '�й���ʱ��' is unrecognized or represents more than one time zone_连接失败! the server time zone value ' й ' is-程序员宅基地
- 数学与生活——读书笔记-程序员宅基地