PCL(点云库)是一个开源的点云处理库,提供了丰富的点云处理算法。它是一个功能强大的工具,可以用于点云数据的获取、滤波、配准、分割、特征提取、物体识别等任务。 首先,PCL提供了多种点云数据的获取方法,包括...
”PCL点云处理“ 的搜索结果
PCL中所有的处理都是基于点云展开的,利用不同的设备获取点云,存储点云等都是点云处理前后必须做的流程,PCL中有自己设计的内部PCD文件格式,为此,设计读写该格式以及与其他3D文件格式之间进行转化的接口类都是很...
在PCL点云处理之等比例放大与缩小点云尺寸(七十二)一章中,介绍了如何等比例放大缩小一块点云,这里介绍如何反算得到两片经过放缩的点云之间的比例,这种计算方法应该不受点云形状和所处位置以及旋转姿态的影响,...
点云处理相关文章
将点云投影到某个规则球面,球面参数由用户指定,在PCL中这部分投影器使用出现问题,需要手动计算投影点的坐标。
有时候,我们处理的点云平面并非位于水平面,而是位于某个任一三维平面上,而大多数算法又只能在水平面处理,或者水平面的点云处理是相对更简单的,所以我们需要做下面的这个处理,将点云旋转到绝对水平的位置,简称...
具体的在任意姿态的输入点云P和Q中构建共面四点集合,使用仿射不变性约束,在共面四点集合中匹配符合条件的对应点对,使用LCP(Largest Common Pointset)策略寻找配准后最大重叠度四点对,得到最优匹配结果,完成...

KFPCS是FPCS的改进版本,具体原理不赘述,代码复制黏贴即可使用。粗配准是在两片点云初始位姿差距较大的未知情况下,将其中一块点云移动到与另一块点云大致重合的过程。
读取点云,使用PCL将其可视化,在窗口点云中鼠标点击两个点,输出他俩的坐标和之间的距离,效果如下所示:
仁兄加油吧,活到老,学到老。持续关注博主,将会更新PCL的滤波、平滑、拟合(贪婪三角化)等点云操作方法。
在点云处理中,计算点云的包围盒是一个重要的任务。包围盒可以用来描述点云数据的边界范围,从而提供有关点云形状和空间分布的信息。水平投影是一种将点云投影到平面上的方法,通常用于提取点云的二维表示。通过对...
点云可视化,交互选择区域,输出区域信息的操作
点云法线估计是一项重要的任务,它能够为点云数据提供重要的几何信息,为后续的分析和处理提供基础。本文将介绍如何使用 PCL(Point Cloud Library)进行点云法线估计,并通过可视化展示结果。
根据自己指定的圆柱长度、圆柱半径、以及中心轴的方向,生成一个圆柱点云数据,保存在PCD文件中。可以在后续的相关实验中使用。

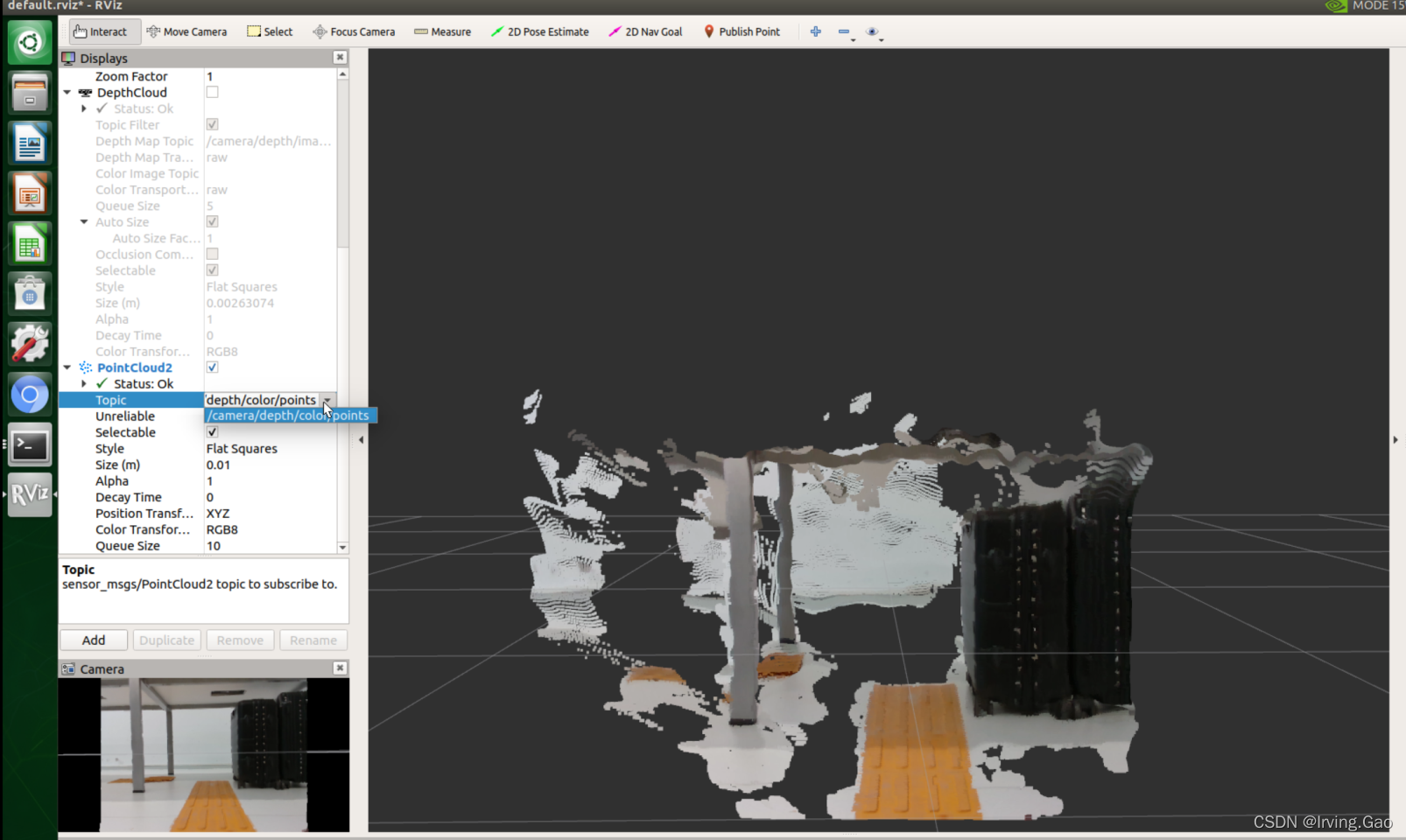
ROS——基于PCL实现点云处理
标签: c++
随机采样一致(ransac)算法是...首先,大家要明确点云直方图的概念,点特征直方图是一种信息丰富的姿态不变局部特征,它代表了点p处的模型属性。它们的计算是基于p个最近k个邻居之间的某种几何关系的组合。它们融合了。
项目简介:探索3D点云处理的新边界 - Point-Cloud-Processing-example 项目地址:https://gitcode.com/LiveStockShapeAnalysis/Point-Cloud-Processing-example 在现代计算机视觉和人工智能领域中,3D点云数据已经...

【代码】PCL点云处理之批量读写点云、随机赋予颜色 并保存。

PCL(Point Cloud Library)是一个常用的点云处理库,提供了许多点云处理的功能,其中包括点云归一化。 点云归一化是将点云数据转换为统一的坐标系,使得不同点云之间可以进行有效的比较和配准。点云归一化的意义...
输入点云数据,主成分分析计算输出特征值和特征向量
关键点的提取,对于处理海量点云是必不可少的,直接处理大规模点云时对很多算法而言都很耗时,此时提取稳定的关键点,可以减少点云处理的数据量,关键点应该是紧凑而能保持对原始点云描述的兴趣点,这在2D的图像和3D...
高斯滤波是一种常用的图像和信号处理技术,它在PCL(Point Cloud Library)点云处理中也得到了广泛应用。本文将介绍高斯滤波在PCL中的原理和使用方法,并提供相应的源代码示例。高斯滤波是一种线性平滑滤波器,通过...
根据激光扫描点云,提取树冠体积有很多种方法,体素累加法是其中一种常用方法,刚好最近在研究这个,就自己实现一下。体素累加法,看名字就知道是把空间划分为体素,通过累加内部含有点云的体素获取点云体积,这在不...
凸包法直接计算树冠体积,对于部分冠点分布均匀充盈的树种是非常快速准确计算体积的方法,下面是具体实现和效果测试。后面会逐步实现其他的不规则点云体积计算方法,用于树冠体积或者其他体积的计算应用。
PCL点云处理之细小空洞修复
标签: 点云
在点云处理中,细小空洞的修复是一个重要的任务。在得到空洞的点云簇后,我们可以使用PCL中的法线估计算法来计算点云的法线信息。假设我们有一个名为cloud的PointCloud对象,其中包含需要修复空洞的点云数据。在计算...
推荐文章
- 1N5819-ASEMI轴向肖特基二极管1N5819-程序员宅基地
- 把maven的setting配置文件改为需要jdk版本_<profile> <id>jdk-1.4</id> <activation> <jdk>1.4</-程序员宅基地
- 使用matlab进行DBscan聚类_dbscan聚类分析图用什么软件-程序员宅基地
- 探秘技术新星:BBS_admin - 一个现代化的论坛后台管理系统-程序员宅基地
- 【译】JavaScript 开发者年度调查报告-程序员宅基地
- 神仙级渗透测试入门教程(非常详细),从零基础入门到精通,从看这篇开始!_网络渗透技术自学-程序员宅基地
- 多个protocbuf版本切换_protobuf调整版本-程序员宅基地
- msf+cobaltstrike联动(一):把msf的session发给cobaltstrike-程序员宅基地
- C语言--编写程序,输入一个整数,判断它能否被3,5,7整除_编程序实现功能:输入一个整数,判断其是否能同时被3、5、7整除。能被整除则输出“y-程序员宅基地
- 数据技术之Hadoop(HFDS文件系统)-程序员宅基地