
”ROS“ 的搜索结果

本着为大家谋福利的心态,根据自己以往的开发经验,打算写一个从零开始制作一个可以实现地图构建和导航的ROS小车。目前某宝上面有很多现成产品,但是我个人认为,一个好的移动机器人开发工程师,应该对机器人的整个...
大家好,我是开心的小鱼,经过几个月的努力,动手学ROS2课程终于和小伙伴们见面了,有很多小伙伴一下午的时间就把前两章给搞定了,小鱼要抓紧啦~ 之前说的鱼香ROS网站已经上线啦,内容参考了docschina,版面简单明了...
机器人操作系统ROS(十一):ROS时间戳及其与年月日时分秒毫秒格式的转换
ros2常用命令,ros2 pkg,ros2 node, ros2 topic, ros2 param, ros2 bag, ros2 service, ros2 action
ros1的rosbag和ros2的rosbag互换

本篇是对ROS基础学习的一个总结。初学者可通过本篇博文对ROS有一个总体上的了解,也可获取一些学习资料,但是无法代替详尽的学习教程;有一定ROS基础者,可以通过本篇博文对ROS的基础知识进行一个回顾,需要用到相关...

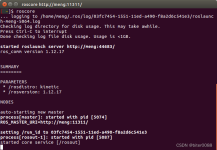
目录概述安装ROS21)安装python3及colcon2) 添加ROS2的源3)安装eloquent桌面版本4)修改~/.bashrc2 安装cartographer及cartographer_ros1) 安装cartographer2) 安装cartographer_ros3. 测试cartographer1) 创建...
ubuntu 22.04 apt-get 安装 ros1 ros Noetic 最新版
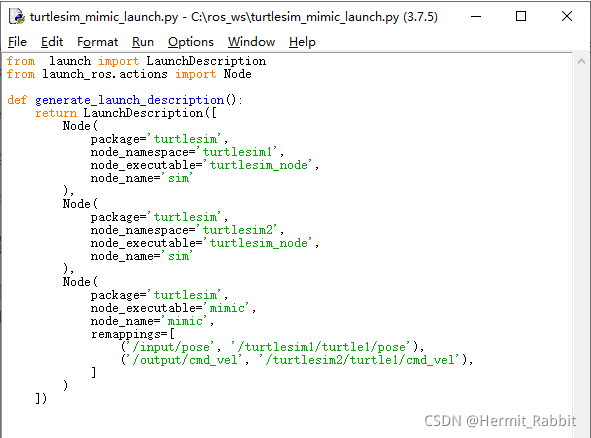
在处理launch过程中,ROS1和ROS2还是有些差别的,因为文件结构不同,不能直接搬用。这里将两者建立过程做一个比对,以提升概念的清晰度。在ROS2中,单独的launch文件是一个python文件,因此脱离ros2环境也能启动,...

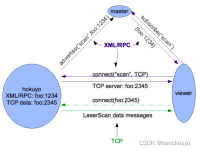
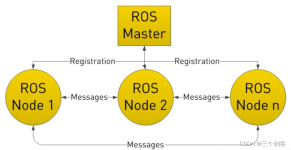
ROS1采用分布式框架,其架构可以分为三个层次:基于Linux系统的OS层,实现ROS核心通信机制以及众多机器人开发库的中间层;在ROS Master的管理下保证功能节点的正常运行的应用层。ROS1的通信机制是每个节点通过ROS ...

机器人操作系统ROS是使用最广泛的机器人中间件平台。它在机器人社区中使用了10多年,无论是在业余爱好者领域还是在工业领域。ROS可用于各种微控制器和计算机,从Arduino到Raspberry Pi再到Linux工作站,它为电机控制...

环境:ubuntu20.04 ,ros-foxy(ros2),vscode 背景:项目需要,一直折腾把ros1下面的包升级到ros2版本,没有熟人带路,纯属个人查找资料摸索,自我理解所得,有错误的地方,望大佬们不吝赐教. 1.消失的句柄 ros1: ...

推荐文章
- 服务器无法与DeviceNetBT_Tcpip_{670E1543-79C1-485C-9B4B-835CE3BA37B3}传输相绑定-程序员宅基地
- NYOJ 118 修路方案(次小生成树)-程序员宅基地
- 【期末复习】微机原理与接口技术_己知 8254 的端口地址为 3000h、3004h3008h 和 30bh外接时钟频率为 2mh2-程序员宅基地
- 2D转换,动画,转化-程序员宅基地
- 旋转拖动验证码解决方案_load_model("keras2.hdf5", custom_objects={'angle_e-程序员宅基地
- Windows下后台静默运行jar包_windows下启jar包关闭窗口不听-程序员宅基地
- windows7的aero的介绍-程序员宅基地
- libevent与libev简介_libevent libev-程序员宅基地
- zookeeper启动Error: JAVA_HOME is incorrectly set问题解决_error: java_home is incorrectly set: e:\java\jdk1.-程序员宅基地
- 操作系统概述_多道批处理系统算不算操作系统-程序员宅基地