”ROS“ 的搜索结果
一打开Vscode,Problems那一栏就是八九十条报错,基本都是找不到相关头文件引起的,相关文件里大片大片的波浪线。然后真的就不报错了!红色波浪线也都消失了!我又改回原来的写法,竟然也不报错了?...
ROS安装版本: Noetic 清华源 sudo gedit /etc/apt/sources.list #清华源 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse deb ...
ROS技术严重依赖于操作系统,因此,必须高度熟悉ROS和ubuntu版本信息,才能配置良好环境。Ubuntu20.04是最新的Ubuntu操作系统,而ROS-Noetic是ROS1.0的最后一个版本。属于交替或过渡的版本。官方的安装可以参考:...

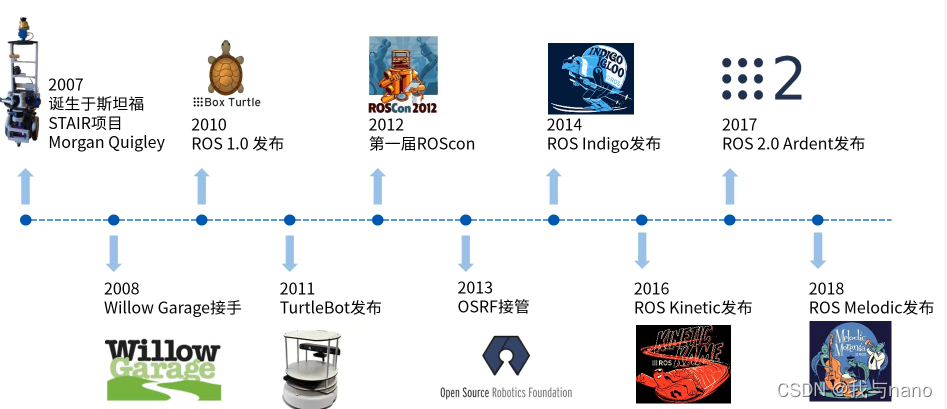



因为最近学习的缘故,花了半天的时间安装了ROS,期间因为ubuntu也是临时安装的双系统,遇到了各种各样的问题,这里记录一下,主要集中在ROS系统安装问题的解决。
1.下载源码 cd catkin_ws/src git clone https://github.com/OuyangJunyuan/ros-yolov5.git ... 然后回到工作空间目录下 ...文件位置:ros-yolov5-master/config/config.yaml 修改如下: yolov5: action: False #

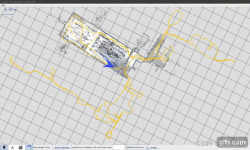
2010年Willow Garage公司发布了开源机器人操作系统ROS(robot operating system),很快在机器人研究领域展开了学习和使用ROS的热潮。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它包含了大量工具...


2 ROS安装方法(melodic版) 1、添加ROS软件源(TX2使用自带源即可,该步可省去) sudosh -c'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest....


目前,网络上主要的ROS2课程主要有: Constructsim:https://www.theconstructsim.com/robotigniteacademy_learnros/ros-courses-library/ros2-basics-course/ Udemy:...


ROS 2的迭代和更新速度非常快,而ROS 1基本已经发展稳定,目前最新LTS版为Melodic,2020年5月将发布ROS 1终极版Noetic Ninjemys。 ROS 2目前LTS版为Dashing,最新版为Eloquent Elusor。ROS 2支持在Ubuntu上同时部署...
ROS中处理回调数据
标签: ros
ros::spin()与ros::spinOnce(),都是ROS消息回调处理函数。这两个函数需要结合ros::Subscriber()(ROS消息订阅函数)来使用。消息回调处理的意思是调用回调函数处理订阅到的消息。首先,使用ros::Subscriber()进行...
slam是针对自主机器人的,因此,需要Ros下进行开发。这里首先介绍如何安装ROS。 1 版本和操作系统选定 Ubuntu install of ROS Noetic The ROS build farmbuilds Debian packages for several Ubuntu platforms,...
ROS2 基础概念 话题
标签: ROS2

ros2之tello无人机 cozmo-ros2: https://blog.csdn.net/ZhangRelay/article/details/93510762 turtlesim-ros2:https://zhangrelay.blog.csdn.net/article/details/98754130 turtlebot-ros2: ...
推荐文章
- NSFuzz:TowardsEfficient and State-Aware Network Service Fuzzing-程序员宅基地
- 刘睿民畅谈大数据:政府应紧急设立首席数据官-程序员宅基地
- nginx 编译安装依赖包_nginx编译怎么添加新的依赖库-程序员宅基地
- Python+OpenCV+Tesseract实现OCR字符识别_python + opencv + tesseract-程序员宅基地
- 微型计算机主板上的主要部件,微型计算机主板上安装的主要部件-程序员宅基地
- 推荐一款可匹敌国际大厂的国产企业级低无代码平台_国产私有化 无代码-程序员宅基地
- UE4 蓝图 实现 数组的边遍历边删除_ue4 数组删不掉-程序员宅基地
- python爬虫之bs4解析和xpath解析_from bs4 import beautifulsoup xpath-程序员宅基地
- MySQL配置环境变量-程序员宅基地
- VGG16进行微调,训练mnist数据集_vgg16 tensorflow 2 mnist-程序员宅基地