1.ROS2前世今生2.ROS与ROS2对比3.动手安装ROS24.ROS2初体验。
”ROS2“ 的搜索结果
ros2中文指南.pdf
标签: ROS2 AI
ROS2开发中文指南,ROS开发必备。ROS2是新的ROS版本。相对与旧版本更加接近工业化场景,更加稳定,同时功能也更加丰富。
ros2使用自建类型编译,订阅以及发布的demo,并且包括和protobuf互转的使用方式. 自建类型为序列化数据{uint32 size, uint8 data[] }
我们创建了两个目录,ros2_ws和在他下面的子目录,运行编译的目录在ros2_ws目录下,src目录下是我们生成的ros的包,我们自己编写的代码也都早src目录下,colcon build编译之后会在ros2_ws目录下生成一下文件,运行...
大概明白了,用指令 colcon build --symlink-install --merge-install时,symlink这东西是指快捷方式,在windows下不好使,所以找不到程序的实体,从而引发报告。直接打开跑,发现一切都正常,能进入断点内单步调试...
【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
sick 激光雷达ros2功能包/官方源码
ros2配置与使用
ros1和ros2的区别,要点记录
在上一讲开发环境搭建中,我们讲解了如何搭建Ubuntu系统环境和ROS2开发运行环境。类似ros1 master中心节点功能,用于减少节点之间发现的时间。info 显示话题消息类型,订阅者数量,发布者数量。创建功能包命令:指定...
arm-ros2:latest
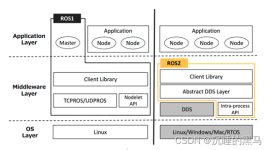
DDS
跟随赵老师学习,最后做出自己的ROS2小车
每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。
ros2常用命令,ros2 pkg,ros2 node, ros2 topic, ros2 param, ros2 bag, ros2 service, ros2 action
自用自用。
硬件:镭神域控 ZED X双目摄像机ros2-foxycuda 11.4。
ROS2 学习(一)ROS2 简介与基本使用
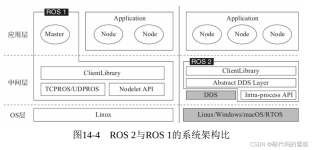
要说ROS2,那就不得不提起ROS,ROS就是机器人操作系统英文全称(Robot Operating System),但ROS本身并不是一个操作系统,而是可以安装在现在已有的操作系统上(Linux、Windows、Mac)上的软件和工具集。ROS出生于2007...
ROS2 的主要命令入口是 ros2,其中又包含大量的子命令,可用于 ROS2 程序的开发和测试。ros2 run:运行 ROS2 节点或任意可执行文件。:启动 ROS2 应用程序,可以同时启动多个节点。ros2 pkg:用于操作 ROS2 软件包,...
ROS2学习(1)ROS2简述
标签: ROS2
日志级别:Fatal --> Error --> Warn --> Info --> Debug。
本文建立在已经安装好Qt Creator的基础上,如果还没有安装Qt Creator请参考这篇
推荐文章
- 【vue-treeselect+vxe-table】数据量大的时候懒加载,数据回显,输入框绑值,末级节点不要前面的箭头等问题详解_treeselect显示加载中-程序员宅基地
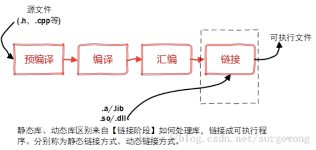
- 【从0入门JVM】-01Java代码怎么运行的_代码如何在jvm中运行-程序员宅基地
- TreeViewer应用实例(ITreeContentProvider与LabelProvider的使用)-程序员宅基地
- 如何将别人Google云端硬盘中的数据进行保存_谷歌网盘怎么保存别人的资源-程序员宅基地
- java中查看数据类型_java查看数据类型-程序员宅基地
- Scrapy-redis分布式+Scrapy-redis实战-程序员宅基地
- web播放H.264/H.265,海康,大华监控摄像头RTSP流方案_海康api hls怎么取265的流-程序员宅基地
- HTML详解连载(7)-程序员宅基地
- PHP使用多线程-程序员宅基地
- 由excel一键生成json的小工具(基于python,仅支持单层嵌套)_excel转json github-程序员宅基地