”ROS2“ 的搜索结果

ROS2 基础概念 服务 请求-应答 仅在客户端专门调用时提供数据

ubuntu20.04安装ROS2
Ubuntu22.04对应的ROS2的版本为Humble Hawksbill(ros-humble)如果不是在Ubuntu22.04中安装ROS,请参考下面Ubuntu和ROS的版本对应关系。
如何傻瓜式快速一键安装ROS或ROS2,看这篇文章就够了!! 一键帮你解决配置源、安装ROS、配置rosdep,让你安装ROS/ROS2不再出错! (Ubuntu版本16.04~22.04、ROS1/ROS2版本步骤一样!)
ROS2-foxy已经不再维护,ROS2-humble成为主角,因而该转变一下开发场景了。如何安装?官方文档没有错,然而,照着做却无法进行。实超中遇到的需要变通的地方,官网是不给你提供解决的,本文给出详细解答。
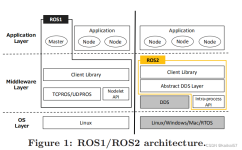
ROS1和ROS2对比
简介:在前面的章节中,我们先简单学习了ROS2的话题发布和订阅,两种操作都是通过python代码实现的,而在实际应用过程中,我们会经常用到命令行操作来辅助调试,更进一步的可以使用GUI工具辅助调试,比如前边用到的...

课程以ROS2-F/G版讲解为主。 文字版: 一、单选题(本大题共6小题, 每小题4分, 共24分。) 1、ROS2默认支持的操作系统平台不包括( )。 A. windows; B. linux; C. macos; D. aliyun 2、ROS2主要使用的C++...
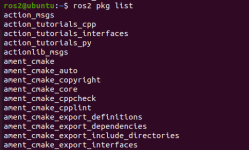
而ROS2中就提供了一个可以检测ros2的方方面面,包括平台,版本,网络,环境,运行系统等等的工具ros2 doctor。仅在Eloquent及更高的版本中可以使用。同时ros2 doctor是ros2cli包的一部分。只要我们安装了ros2cli,...
ROS2 基础概念 参数
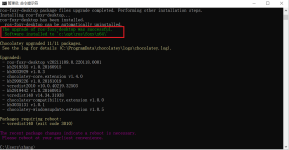
windows10 + ros2 + python
此外,ROS1和ROS2的架构和设计也有很大的不同,需要花费一定的时间和精力去学习和适应。如上占比不严谨,仅作示意。:ROS的软件开发和调试需要掌握一定的编程技能和工具使用方法,需要进行充分的测试和验证,以确保...
ROS2中的工作空间类似我们常说的概念——“工程”,是我们在ROS中开发具体项目的空间,所有功能包的源码、配置、编译都在该空间下完成。 我们可能会同时开发多个项目,就会产生多个工作空间,所以工作空间之间也有一...
ROS官方文档
需求:要将ros2录制的db3文件,转为ros1的bag文件。太长不开,直接看方案3。

ROS2 基础概念 话题 发布-订阅

节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系方式就是话题,它...ROS2将复杂系统分解为多个模块化节点。话题是ROS图的重要元素,充当节点交换消息的总线。
ros2 launch 的用法以及基础功能的示例
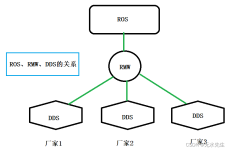
ROS 2 构建在 DDS/RTPS 之上,DDS/RTPS作为ROS的中间件,提供发现、序列化和传输。本文详细解释了使用 DDS 实现和/或 DDS 的 RTPS 有线协议背后的机理。

ROS2环境下用 RVIZ 实现点云的可视化
ROS 1 的迁移到ROS 2指南前言一、先决条件二、迁移步骤1.Package manifests2.元功能包Metapackages3.消息、服务和操作定义4.构建系统 Build system5.编译工具 Build tool6. 纯 Python 包6.更新 CMakeLists.txt 以...

Ros2的Node类同于Ros1,但学习Ros2要系统化;因此本文将特别展现两种版本的Node,及它们之间的些许不同。

Ros2安装流程
ROS仿真、专为自动驾驶研发提供的系统平台

ROS2迟早要取代ROS1,因此,提前接触ROS2是明知选择。一般来说,windows比Ubuntu要方便开发,因此,这里推荐ROS2+Win10的系统配置。
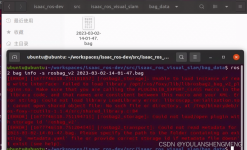
ros2录制的bag包文件,录制完后会生成一个目录,在目录下会生成多个文件,如下:ros1 录制的bag文件,只有一个文件:例如。
文章信息:标题:ROS1/ROS2版本代号原文地址:https://fishros.org.cn/forum/api/topic/96关键词:一键安装,版本代号,参与者:,版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。

TF2 - TRANSFORMS IN ROS2 ROS机器人TF基础(坐标相关概念和实践) TF2 - 概述 TF2 是 TF (TransForm) 库的第二代。 事实上,ROS1 中的 TF 目前在后台调用 TF2。 ROS2 仅使用 TF2。 TF2 跟踪树结构中的所有...
ROS2和ROS常用命令的异同
M1芯片安装ROS