”ROS2学习笔记“ 的搜索结果
ROS2学习笔记之创建工作空间篇背景前期准备学习内容1. Source ROS 2 环境变量2. 创建一个新的文件夹3. 下载一个简单的例子4. 解决依赖关系5. 使用colcon编译工作空间6. 加载新建的工作空间7. 修改新建的工作空间中的...
在ROS2中根据不同通讯类型定义不同接口文件,该文件后缀分别为msgsrvaction.话题接口文件名:*.msgint64 num服务接口*.srvint64 a #这三个是输入参数int64 bint64 c---int64 sum #这个是返回结果动作接口*.action----...
ROS 2 开发环境在使用前需要正确配置。有两种方法可以做到这一点:每新开一个终端文件都source一次,或者直接把source的指令放到启动脚本文件(.bashrc)中。如果在查找或使用 ROS 2 软件包时遇到任何问题,首先要做...
这篇笔记内容是正常情况下应该怎么开始一个ros2的项目,按照自己的理解写的,不一定准确
ROS2学习笔记之创建启动文件篇背景准备条件学习内容1. 准备操作2 编写启动文件2.1 启动文件详解3 ros2 launch4. 用rqt_graph查看节点关系图总结 学习目标:能够通过启动文件启动一个复杂的ROS系统 背景 在前面的教程...
ROS2学习笔记 ROS2与ROS1共存安装
ROS2学习笔记之创建自己的功能包背景前期准备学习内容1. 创建一个包2. 编译新建的包3 Source工作空间的配置文件4 使用新建的包5. 查看包的内容6. 自定义 package.xml总结 学习目标: 使用CMake或Python创建一个新的包...
ROS2学习笔记介绍Turtlesim和RQT篇1.安装Turtlesim2.开始Turtlesim3.使用Turtlesim4.安装rqt5.使用rqt5.1尝试使用Turtlesim的Service5.2 改变乌龟轨迹的颜色6.话题重映射7.关闭 Turtlesim总结 对于ros1的老用户对...
动作就像是一种服务,可以让你执行长期运行的任务,提供定期反馈,并且可以取消。机器人系统可能会使用动作来导航。一个动作目标可以告诉机器人前往某个位置。当机器人导航到该位置时,它可以沿途发送更新(即反馈)...
节点是ROS2 基本元素,在机器人系统里面负责单一模块功能作用在本课程,通过运行中执行文件和,启动turtlesim包中的节点你学会了使用来获取活动节点的名字,使用指令去深入了解某个节点.对于一个复杂真实的机器人...

ros2学习笔记,希望大家多多批评指正
节点具有用于定义其默认配置值的参数。您可以从命令行获取get和set的参数值。您还可以将参数设置保存到文件中,以便在以后的会话中重新加载它们。
在ros2里面,节点可通过服务进行通信。不像话题那样,一个节点发布消息可以被一个或多个订阅器接收的的通信方式;服务是一种请求/响应模式,客户端节点发出请求,服务端节点处理这个请求并给出响应。通常,不会连续...
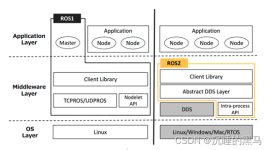
ROS2的前身是ROS,ROS即机器人操作系统(Robot Operating System),ROS为了“提高机器人软件复用率”的目标,时至今日,ROS已经广泛用于各种机器人的开发,无论是机械臂、移动机器人、水下机器人,还是人形机器人、...
在使用任何已安装的可执行文件或库之前,您需要将它们添加到路径和库路径中。安装提供环境,以便为我们的工作区提供示例软件包所需的构建依赖项。一般来说,当你计划迭代少量软件包时,建议使用顶层,而不是把所有...
正在跟随博主@古月的 ROS2入门21讲 课程进行学习。ROS2的前身是ROSROS即机器人操作系统(但是ROS本身并不是一个操作系统,而是一个软件库和工具集。ROS2继承了ROS并解决了ROS的一些问题,性能更加完善。ROS2很新颖...
古月居ROS2学习笔记
标签: 自动驾驶
学习笔记
如果需要仔细检查系统中的日志消息,将非常有帮助。您可能希望出于多种原因检查日志消息,通常是为了找出哪里出了问题以及导致问题的一系列事件。


ROS (The Robot Operating System, 机器人操作系统) 是一套用来...ROS2 支持在Linux、Windows、MacOS等多个平台上安装运行,ROS2 galactic在linux上主流平台要求是Ubuntu 20.04 64位。我使用的就是ubuntu 20.04,所以.


0 ROS2学习笔记
标签: ROS2
ROS2的学习笔记目录

和其他代码开发一样,首先建立一个工作空间,一个工作空间下可以有多个功能包,一个功能包可以有多个节点存在(或者一个功能包只有一个节点)ROS2中功能包根据编译方式的不同分为三种类型:cmake: 适用于C++。...
推荐文章
- EfficientDet 训练自己的数据集_efficientdet训练自己的数据-程序员宅基地
- HTML文件总是WPS打开,设置wps默认打开方式_设置默认使用WPS打开文件-程序员宅基地
- ISE14.7安装行得通的路。当你是win11。_ies 14.7 虚拟机-程序员宅基地
- Linux进程间通信-程序员宅基地
- Roxlabs数据获取服务:解锁高效数据采集与网络应用新境界-程序员宅基地
- FAISS+bge-large-zh在大语言模型LangChain本地知识库中的作用、原理与实践_bge-large-zh训练自己的知识库-程序员宅基地
- 用Python实现打印杨辉三角-程序员宅基地
- html未找到音频文件夹,【已解决】html5中MediaRecorder的dataavailable没有执行获取不到录音数据...-程序员宅基地
- CCF|| 201809-1 卖菜_ccf 201809-1 卖菜-程序员宅基地
- intel cpu性能瓶颈分析方法_使用intel tmam 测量-程序员宅基地