大家也可以去知乎看我的回答,别忘了三连哦~深度相机也被称为3D相机,它和普通2D相机的区别在于可以获取物体到相机的距离信息,加之2D平面的X,Y坐标,可计算出每个点的三维坐标,以此我们可推断深度相机的应用,如...
”TOF相机“ 的搜索结果
金属台、金属框架上的TOF相机拍摄的数据,金属表面反射比较严重,很多点都相机接收的幅值为0。TOF相机在工业,尤其是金属行业应用的可以参考。O3D相机数据,可以用ifmVisionAssistant打开。
目前结构光技术有如下几种...3.TOF方案,传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来发展的一个重要方向。
设计了以激光为驱动光源的TOF相机嵌入式系统,采集灰度图像和深度图像对合作靶标进行实时检测识别、匹配,并求出目标物体的位姿信息。所使用的靶标为圆形靶标,采用经典的阈值算法,提取靶标的形心坐标以及计算圆...
=应用程序嵌入从ToF相机捕获数据,可视化点云,过滤选项,控制连接到电机的Arduino板,使用ICP合并云,保存和导入.pcd文件。 Lidarboost = Sebastian Schuon等人的LidarBoost论文第一步的实现。 #### messy_code(C ...
ToF相机的有效深度数据提取与校正算法研究.docx
鉴于ifm易福门3D ToF相机的技术优势和中国移动机器人市场的快速发展,ifm易福门3D ToF相机在中国移动机器人市场上有着广阔的应用前景。:无论是在强烈的阳光下还是在缺乏外部光源的环境下,ToF相机都能够正常运作,...
国内外主流TOF相机品牌与参数


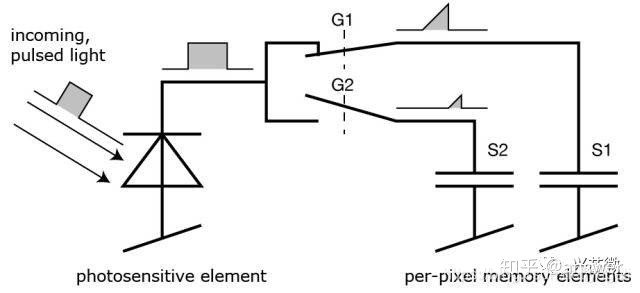
ToF相机工作原理: ToF相机给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲往回的飞行时间来得到目标距离。ToF相机可以同时得到整幅图像的深度(距离)信息。 深度图通常是灰度图,其中的...
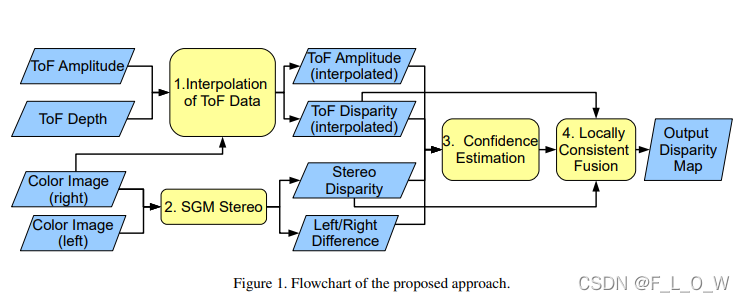
来源:3D视觉工坊在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf、代码链接这里给大家推荐下ToF微信群,扫码入群,方便大家沟通交流:本文主要研究了时间飞行(ToF)摄像头的多径推断(MPI)问题,并使用...
深度相机(TOF)的工作原理
标签: 人工智能
关于TOF相机,维基百科里有一个较好的概述,鉴于很多同学无法查看维基百科,所以此篇的内容为维基百科的翻译版。并加上一些个人的注解。
提出一种针对 ToF 相机的有效深度数据提取与校正算法,利用深度图和置信度图对深度信息进行校正。首先,基于核密度估计和连通域标记对测得的深度图进行自适应分割;然后使用一种改进的结构张量进行边缘检测,从而...
深度相机(TOF)的工作原理
标签: TOF
Basler Tof相机实时深度图,可鼠标选点,然后打印出3D信息,c++实现
校准不好TOF相机就废了?
标签: TOF
校准不好TOF相机就废了? 原文:(143条消息) 校准不好TOF相机就废了?_深度视觉小司机的博客-程序员宅基地 五种校准 一、镜头校准 二、温度校准 三、非线性校准 四、共偏校准 五、逐像素校准 六、结语 校准不好TOF...
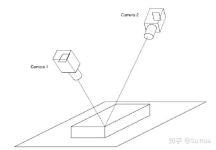
针对基于time-of-flight(TOF)相机的彩色目标三维重建需标定CCD相机与TOF相机联合系统的几何参数,在研究现有的基于彩色图像和TOF深度图像标定算法的基础上,提出了一种基于平面棋盘模板的标定方法。拍摄了固定在...

ifm3d 用于基于ifm pmd的3D ToF相机的库和实用程序。发行版本 :warning: 请注意, master分支通常处于进行中状态,您可能要使用带标签的进行生产。当前修订ifm3d版本支持的O3D固件版本支持的O3X固件版本支持的Ubuntu...
TOF相机很好的总结
标签: TOF
这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。TOF相机与普通机器视觉成像过程也有类似之处,都是由光源、光学部件、传感器、控制电路以及处理电路...
最近好奇都是TOF 相机 L5151 和 Ipad pro 上带的深度相机模块有啥不一样, 网上很少有相关的中文资料来介绍 原理上的差异, 简单搜索了一下, 在此小小总结. Apple Lidar Camera 苹果采用的激光是 VCSEL(Vertical-...
本文将探讨TOF相机校准的重要性,并介绍点云技术及其在TOF相机中的应用。外参校准常用的方法有基于特征匹配的方法和基于角度测量的方法。综上所述,TOF相机校准的质量对于准确获取深度信息至关重要,点云技术则为TOF...
ifm3d-ROS是一个包装周围使IFM的使用PMD-基于飞行时间相机从内的软件系统。 软件兼容性列表 ifm3d-ros版本 ifm3d版本 ROS分布 0.1.0 0.1.0 动能 0.2.0 0.2.0 动力学,靛蓝 0.3.0 0.2.0 动力学,靛蓝 0.4.0 ...
matlab 图片叠加的代码

推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地