
”cholmod-dev“ 的搜索结果
CMake脚本可使用Tim Davis的 (CHOLMOD,UMFPACK,AMD,LDL,SPQR等)和Visual Studio中的以及CMake支持的其余Windows / Linux / OSX IDE。 该项目包括预编译的BLAS / LAPACK DLL,可轻松与Visual C ++一起使用。 ...
最近在跟着高翔博士的《SLAM十四讲》学习slam,在安装g2o的时候出现libcholmod-dev文件找不到的问题:输入sudo apt-get install libcholmod然后按Tab键,Tab键就是自动补充命令,当你记不住完整命令的时候,你按下它,...

scikits.sparse.cholmod(代码在不使用此库的情况下运行-仅当您想使用更快的cholesky因式分解时才需要) 在Ubuntu上安装 必要时添加“ sudo”: $ apt-get install python-numpy python-scipy mayavi2 python-...
前段时间在看弄视觉SLAM是时候需要安装g2o,但是在安装依赖项的发现有些lib找不到,本次使用ubuntu14.04系统,采用命令行下载:sudo apt-install libqt4-dev qt4-qmake libqglviewer-dev libsuitesparse-dev ...

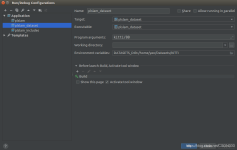
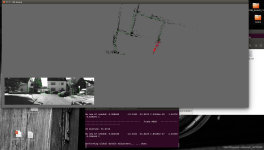
slambook2(ch10)—— Ubuntu18.04安装g2o_viewer + 例程演示一、安装g2o_viewer1.检查是否安装g2o_viewer:2.g2o_viewer安装:二、例程演示1.pose_graph_g2o_SE32.pose_graph_g2o_lie 一、安装g2o_viewer ...

好像每次重装系统后都会出现g2o的一个问题就是报错:CHOLMOD_INCLUDE_DIR和CHOLMOD_LIBRARIES找不到分析: 其实cholmod本来在安装g2o时应该被装到/usr/local/include/g2o/solvers/cholmod里面的,但是点进去发现...
原因:在安装g2o库时,缺少指定的依赖项。 解决方案: 卸载g2o库,参考blog1 sudo rm -r /usr/local/include/g2o //删除g2o的头文件,位于/usr/local/include/g2o下 sudo rm -r /usr/local/lib/libg2o* //删除g2o...
声明:本博客仅供个人学习使用。转载自 Jasmine_shine g2o的安装及初步使用 运行环境:ubuntu12.04 + g2o 个人原创,转载请注明...sudo apt-get install libeigen3-dev libsuitesparse-dev l
sudo apt-get install libeigen3-dev libsuitesparse-dev qtdeclarative5-dev qt5-qmake 下载源码 git clone https://github.com/RainerKuemmerle/g2o.git 开始编译 cd g2o mkdir build cd build cmake .. ...
g2o/solvers/cholmod/linear_solver_cholmod.h: 没有那个文件或目录 分析原因: 在安装g2o库时,缺少指定的依赖项。 解决方案: 1)卸载g2o库 sudo rm -r /usr/local/include/g2o //删除g2o的头文件,位于/...

问题: 配置ORB-SLAM2时,运行 cmake .....出现找不到CHOLMOD_INCLUDE_DIR与CHOLMOD_LIBRARY的错误,如下所示: hri@hri-hwb-Teclast:~/rosbuild_ws/package_dir/ORB_SLAM2_Fusion/build$ cmake .. -DCMAKE_BUILD_T...
CMake Error at /usr/share/cmake-3.16/Modules/FindPackageHandleStandardArgs.cmake:146 (message): Could NOT find SDL (missing: SDL_LIBRARY SDL_INCLUDE_DIR) Call Stack (most recent call first): ...

from scikits.sparse.cholmod import cholesky 但是我并没有从scikits里面找到这个函数。。。 (如果有这样弄成功的,望告知,谢谢) 2) from sksparse.cholmod import cholesky 幸运的是,我找到了scikit-spa...
比较新的视觉SLAM适配的相机硬件有:该算法支持单目、双目还有RGBD的视觉SLAM系统stella_vslam 的一个显着特点是系统可以处理各种类型的相机模型,例如透视、鱼眼和等距柱状。如果需要,用户可以轻松实现额外的相机...

本文为复现一篇论文的开放源码。 《PL-SLAM: a Stereo SLAM System through the Combination of Points and Line Segments》 Gomez-Ojeda R, Zuñiga-Noël D, Moreno F A, et al. PL-SLAM: a Stereo SLAM System ...
SLAM开发环境搭建准备CMAKE安装cmakeslam开发环境安装Eigen安装sophus安装Pangolin(在slambook2/3rdpart/Pangolin)安装ceres安装g2o安装DBoW3(先装opencv)ch11安装点云库PCL(依赖boost、vtk库)安装八叉树地图...

最近在跟着高翔博士的《SLAM十四讲》学习slam,在安装g2o的时候出现libcholmod-dev文件找不到的问题,当时搜索了好多也没要找到比较好的解决办法,后来咨询了一下大神,成功解决了!可能由于版本不同吧,所以安装这个...
在安装g2o 库时提示Could NOT find CHOLMOD (missing: CHOLMOD_INCLUDE_DIR CHOLMOD_LIBRARIES) 使用 :sudo apt-get install libsuitesparse-dev 进行解决
找不到的原因是版本问题。 安装时输入sudo apt-get install libcholmod然后按Tab键,自动补充完整其版本,然后安装。 转载于:https://www.cnblogs.com/larry-xia/p/11525468.html...
推荐文章
- Response使用 application/octet-stream 响应到前端_application/octet-stream;charset=utf-8-程序员宅基地
- 利用MultipartFile实现文件上传_实现了multipartfile file上传文件时要选择一个栏目,传给后端一个栏目id,如何实现-程序员宅基地
- muduo之Singleton_muduo singleton-程序员宅基地
- html5 动态存储 localStorage.name 和localStorage.setItem()的差别_localstorage.setitem('aa')和localstorage.aa一样吗-程序员宅基地
- 02.loadrunner之http接口脚本编写_http脚本-程序员宅基地
- The server time zone value ‘�й���ʱ��‘ is unrecognized or represents more than one time zone.-程序员宅基地
- 如何打造企业短视频账号的人设?_做的比较有人格化的公司短视频账号-程序员宅基地
- 一个会做饭的程序员如何每天给女朋友带不同的便当?-程序员宅基地
- PendingIntent重定向:一种针对安卓系统和流行App的通用提权方法——BlackHat EU 2021议题详解 (下)_getrunningservicecontrolpanel-程序员宅基地
- python 之 面向对象(反射、__str__、__del__)-程序员宅基地