目前,我们提供了KITTI数据集和NuScenes数据集的数据加载器,并且正在支持更多数据集。 KITTI数据集 请下载官方的KITTI 3D对象检测数据集,并按以下方式组织下载的文件(可以从[road plane]下载路面,这对于培训中...
”kitti“ 的搜索结果


利用 PCL库对KITTI数据集和livox-hikvision融合数据进行三维重建.zip

文件准备完成后,应包含图像数据和txt的标签数据,同时还划分成了训练集和验证集。首先将label中的类进行合并,原数据的标签class有九个类,该代码将class合并成五个类,如果想要将类别合并成三个类可以将合并汽车类...
1、资源内容:为 YOLO c 版本添加接口以批量处理 TUM、KITTI 数据集并保存检测结果+源代码+文档说明 2、代码特点:内含运行结果,不会运行可私信,参数化编程、参数可方便更改、代码编程思路清晰、注释明细,都经过...
1、kitti数据采集平台 KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。图示为传感器的配置平面图,为了生成双目立体图像,相同类型...
而我们在使用过程中,通常会对某些类别进行合并,将Car,Van,Truck,Tram统一划分为Car,将Pedestrian与Person_setting统一设置为Pedestrian,保留Cyclist,去除Misc。数据集划分完成后需要将YOLO格式转换为COCO...
KITTI数据集相机图像和激光雷达点云对齐
KITTI激光雷达点云可视化。
这个资源整理了kitti数据集raw data的基准groundtruth,并且给出了kitti转tum的结果,方便进行对比。 1、poses(00-10) 2、times(00-10) 3、转成tum(00-10) 4、对应数据集轨迹图(00-10) 5、数据集sequence...
pip install kitti2bag -i 清华源镜像。kitti官网下载数据,例如:2011_09_26。安装kitti2bag。
添加环境变量,以便下次使用时直接输入kitti2bag -t 2011_09_26 -r 0005 raw_synced。我已科学上网 ,按照github上作者的教程:先下载kitti2bag工具包,再转换。在/home摁‘’ctrl+h’‘打开/.bashrc,最后添加以下...
ELAS是一种基于概率模型的有效立体匹配算法,能够给予双目图像生成深度图,进而转化为点云.该算法的一种改进算法为LS-ELAS,其论文发表在2017年ICRA上,文章题目为"LS-ELAS: ...本文使用的KITTI数据集由kitti2bag转换为.
准备文件:序列真值轨迹+序列times文件,如05.txt和05序列的times.txt(位于kitti_data_odometry_color文件夹中) 采用工具:evo中自带的转换程序,evo中contrib文件夹下的kitti_poses_and_timestamps_to_trajectory...
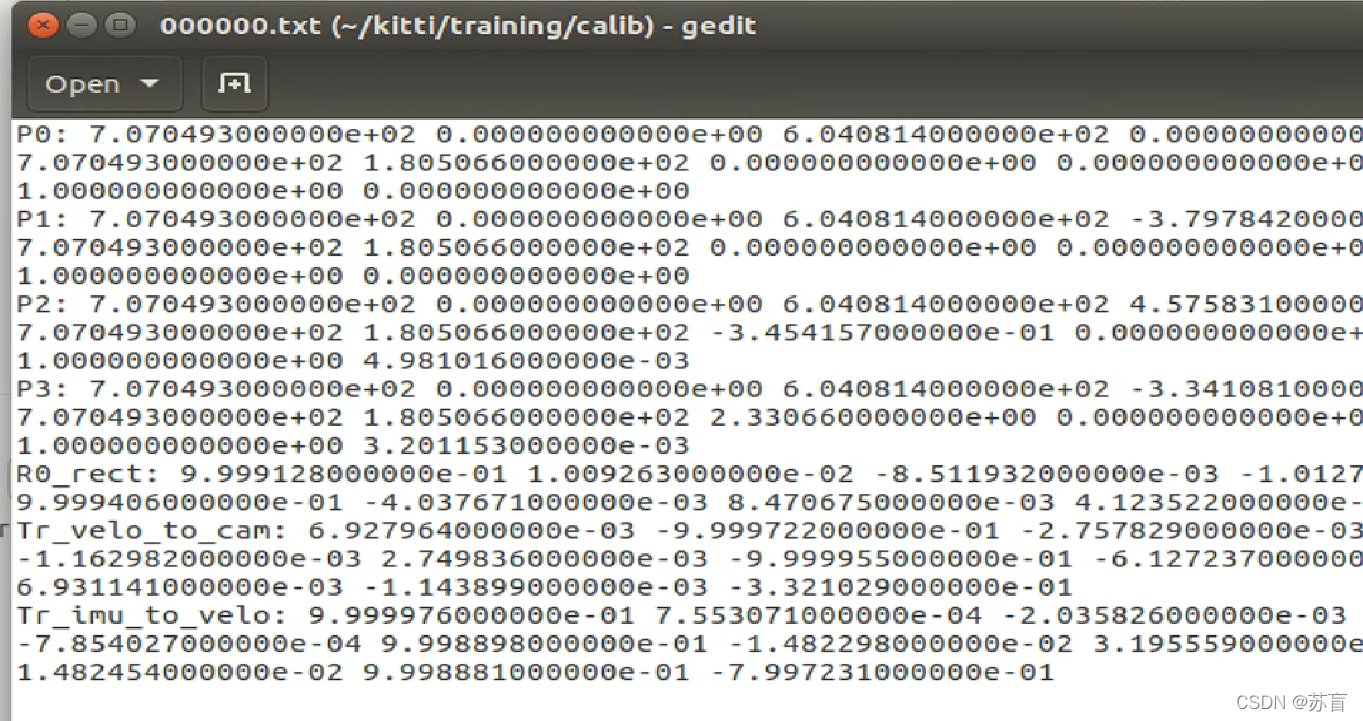
kitti数据集的标定文件
标签: 数码相机
介绍文档。
KITTI数据集中easy、moderate、hard根据标注框是否被遮挡、遮挡程度和框的高度进行定义的,具体数据如下:简单:最小边界框高度:40像素,最大遮挡级别:完全可见,最大截断:15%中等:最小边界框高度:25像素,最大...
kitti mini data object label_2 数据是mini 版KITTI数据集的标签数据,含20个训练场景的标注文件。Mini版可以用于快速验证三维点云算法模型,下载速度更快。详细介绍及使用方式请参考:...


点击下载:https://s3.eu-central-1.amazonaws.com/avg-kitti/data_object_velodyne.zip。:点击下载:https://s3.eu-central-1.amazonaws.com/avg-kitti/data_object_image_2.zip。:点击下载:...
ubuntu下,Vins-Fusion运行kitti,euroc和tum数据集并使用evo评估
# kitti数据集的真实路径 /media/yoyo/新加卷/Downloads/kitti_data # 训练数据集的路径 /home/yoyo/MyDocuments/PyProjects/monodepth2/kitti_data/2011_09_28/2011_09_28_drive_0016_sync # 训练数据集创建软...

打开第一个终端 roscore 打开第二个终端 进入工作区间内,分别输入:cd GPS_Stereo_Ins/catkin_ws catkin_make ...source devel/setup.bash ...进入工作区间内,分别输入:cd GPS_Stereo_Ins/catkin_ws ...


推荐文章
- com.netflix.discovery.shared.transport.TransportException: Cannot execute request on any known serve-程序员宅基地
- PAT乙级练习题1010 一元多项式求导_pat 乙级 1010-程序员宅基地
- You can also run `php --ini` inside terminal to see which files are used by PH P in CLI mode_you can also run `php --ini` in a terminal to see -程序员宅基地
- 对UDP校验和的理解_udp 数据包 校验和 checksum=0-程序员宅基地
- 递归遍历文件夹,以c:/windows为例-程序员宅基地
- git 本地与远程的链接_git如何本地和网页链接-程序员宅基地
- ArrayList与HashMap遍历删除元素,HashMap与ArrayList的clone体修改之间影响_在arraylist和hashmap遍历的同时删除元素,可能会导致一些问题发生-程序员宅基地
- Chapter2-软件构造过程和生命周期_iterative and agile systems development lifecycle -程序员宅基地
- 4.6 浮动定位方式float_c语言中float的左右浮动属性示例-程序员宅基地
- OSS上传【下载乱码问题】_阿里云oss文件名乱码-程序员宅基地