
”kitti“ 的搜索结果
基于点云的PointCNN点卷积神经网络,使用KITTI数据集对车辆的点云输入进行语义分割Python源码+源代码+文档说明 - 不懂运行,下载完可以私聊问,可远程教学 该资源内项目源码是个人的毕设,代码都测试ok,都是运行...
1.KITTI数据集概述 KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow)...

ORB-SLAM2算法1已成功编译安装ROS版本ORB-SLAM2到本地,本篇目的是用EuRoc、TUM、KITTI开源数据来运行ROS版ORB-SLAM2,并生成轨迹。
kitti点云地图拼接
标签: slam
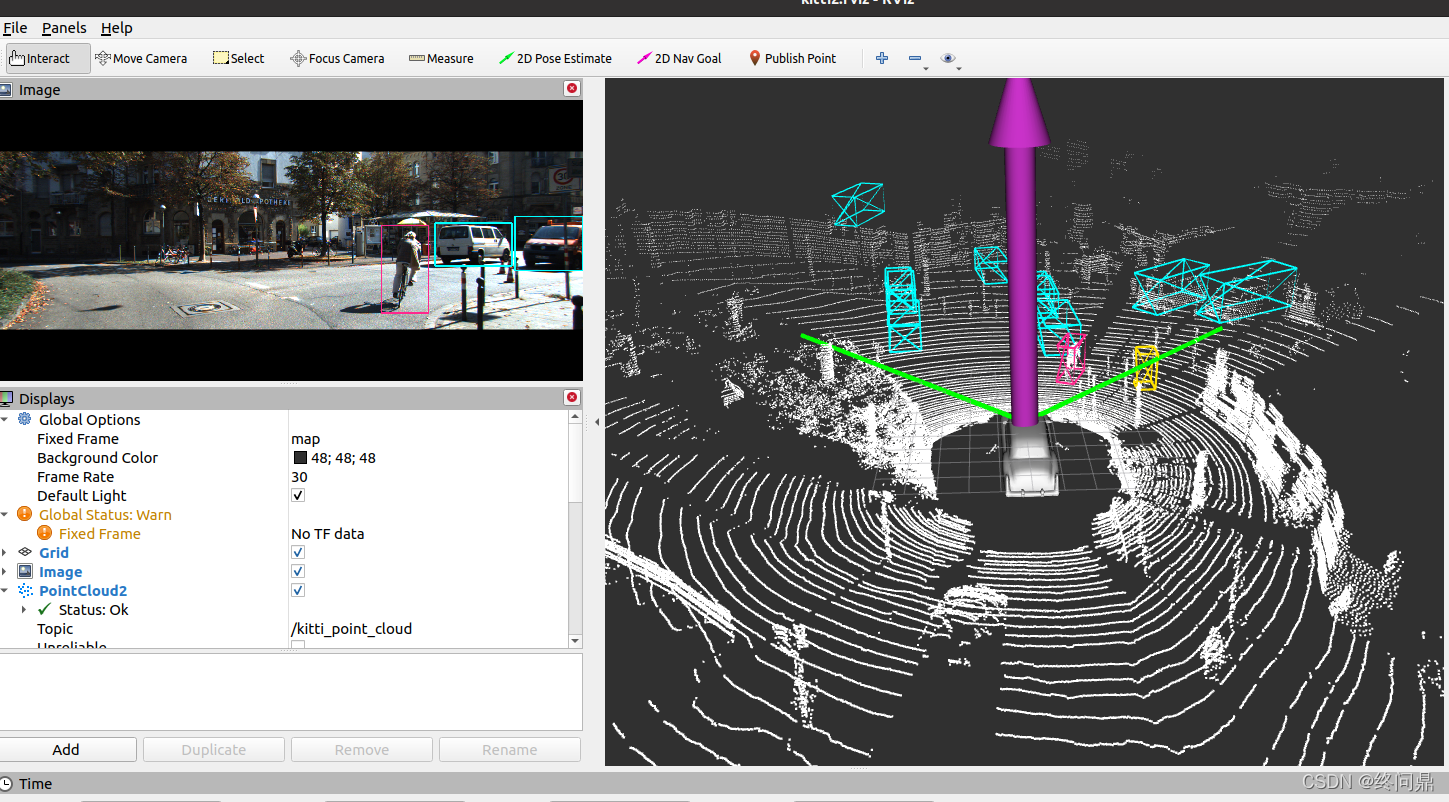
前言:这段时间在学习坐标系变换相关的知识,同时尝试了利用kitti公开点云数据集以及对应的真实位姿,拼接出全局地图,如下图所示,我采用了kitti点云数据集的00序列来测试拼接地图。下面大致记录下点云拼接过程以及...
打开rviz,点击Add,在By topic中订阅 /kitti_cam下的Image,即可显示发布的图片。这个教程配置环境变量那非常好用,避免了在vscode的 import中出现大量无法解释的问题。...下新建kitti.py文件。再执行下述指令更新pip。

本节详细介绍KITTI从图像坐标系到激光雷达坐标系的变换原理、过程和代码。 Kitti数据集的Tr_velo_to_cam矩阵是将激光雷达点云坐标变换到图像坐标系。Tr是一个3x4的矩阵,直接左乘激光雷达坐标即可得到图像坐标系中...
KITTI数据的原始数据
标签: 自动驾驶
KITTI数据的原始数据集
rgb图像 这个是雷达稀疏图 这个是补全后的图像 code后续整理出来放(python)
KITTI数据集简析
标签: 自动驾驶

KITTI数据集完整版本
标签: 数据集
KITTI数据集完整版本
自动驾驶KITTI数据集解析
标签: slam


打开标签文件,把标签文件的每一行作为一个字符串保存在lines[],便利lines[]每一个元素,传入Object3d类中实例化,在Object3d类中将标签文件的每一行元素中的每个元素解析出来作为Object3d的属性,最后便利完成生成...
目的使用雷达点云提供的深度信息如何实现将雷达的三维点云投影到相机的二维图像上kitti数据集简介kitti的数据采集平台,配置有四个摄像机和一个激光雷达,四个摄像机中有两个灰度摄像机,两个彩色摄像机。...
链接:https://pan.baidu.com/s/1iTTHjE-8zJIQx9ZzNvlkEw?左侧相机拍摄 彩色 7481张 KITTI格式标签。
KITTI数据集中雷达点云与图像数据融合的matlab源代码,用于自动驾驶环境感知算法研究,初学者适用
为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。5-8.(浮点) 物体的2维边界框...
近期因实验需要利用kitti数据集,发现关于评估工具使用的部分网上教程不够详细,特此记录. 文末为了方便对数据结果观看,附上了修改代码. 1. KITTI评估工具来源 官网评估工具 下载后文件目录包含: matlab(2D/3D框显示...
将KITTI中的Odometry数据转换ros bag文件


1
1、KITTI数据集采集平台:KITTI数据采集平台包括2个灰度摄像机,2个彩色摄像机,一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统。坐标系转换原理参见click。KITTI提供的数据中都包含三者的标定文件,不...
本文为8月31日目标检测学习笔记,分为两个章节: - ADAS(Advanced Driver Assistance System); - KITTI 数据集- Faster RCNN。
推荐文章
- python读取raw数据文件_numpy – 使用python打开.raw图像数据-程序员宅基地
- Splunk分布式部署简介_splunk部署-程序员宅基地
- 基于鲸鱼优化算法WOA,哈里斯鹰算法HHO,灰狼算法WOA,算术优化算法AOA实现13类工程优化工程问题求解附matlab代码_aoa-hho算法-程序员宅基地
- FreeMarker(三)简单使用-程序员宅基地
- Qt + Opencv 实现的一个简单文字识别的demo_qt opencv字符识别-程序员宅基地
- CMakeLists.txt demo-程序员宅基地
- docker启动容器报错 Unknown runtime specified nvidia._docker: error response from daemon: unknown runtim-程序员宅基地
- spring cloud feign组件简单使用_"@feignclient(name = \"user-provider\",fallback = -程序员宅基地
- Android心得4.3--SQLite数据库--execSQL()和rawQuery()方法_android sqlite rawquery-程序员宅基地
- Spring MVC 学习笔记 第四章 Spring MVC 模型数据解析_spring mvc模型数据解析笔记-程序员宅基地