
”nuScenes“ 的搜索结果
nuScenes数据集3D转2Dpython源码
nuScenes-map-expansion-v1.3
每帧数据都包含下列的信息。
nuscenes数据集
标签: 自动驾驶
跟踪结果格式:https://www.nuscenes.org/tracking/?1.时间戳取值为秒*1000000,nuscenes devkit在解析时以精度作为转换。2.单位旋转矩阵对应的四元数为:[1,0,0,0]3.传感器外参为传感器到ego的转换。
nuScenes 数据集 (pronounced /nu:ːsiː:nz/) 是由 Motional (以前称为 nuTonomy) 团队开发的自动驾驶公共大型数据集。nuScenes 数据集的灵感来自于开创性的 KITTI 数据集。nuScenes 是第一个提供自动驾驶车辆整个...
nuscenes-coco
nuScenes 数据集 可视化
标签: 自动驾驶
nuScenes 数据集 可视化
python demo.py tracking,ddd --load_model ../models/nuScenes_3Dtracking.pth --dataset nuscenes --pre_hm --track_thresh 0.1 --demo ../videos/nuscenes_mini.mp4 --test_focal_length 633
Lyft数据集SDK 欢迎使用的 ! 该devkit将帮助您可视化和探索我们的数据集。...只需运行python -m lyft_dataset_sdk.utils.export_kitti nuscenes_gt_to_kitti --lyft_dataroot ${DS_PTH} --table_folder
Yolo格式是适用于Yolo模型训练的数据集格式,要想使nuimages数据集在Yolo模型中进行训练,必须要把数据转换成Yolo格式,此文章是nuscenes中nuimages数据集的踩坑转换。这里使用nuscenes数据集地址:...
bevformer运行在autodl,使用完整的数据集进行训练。
单卡gpu不能满足,采用分布式训练,在mmdet3d/apis/train.py文件中把distributed参数设置为True,直接vs-code全局搜索找到distributed。:在mmdet3d/models/vtransforms/base.py中2个forward函数的参数都加上metas...

nuScenes开发套件 欢迎使用和数据集的 。 概述 地图扩展 地图版本 nuScenes入门 已知的问题 引文 变更日志 2021年4月5日:Devkit v1.1.3:错误修复和pip要求。 2020年11月23日:Devkit v1.1.2:发布具有激光雷达底...
nuScenes数据集开发教程 数据集下载:nuScenes. GitHub:nuscenes-devkit. 安装 指令: pip install nuscenes-devkit’‘’‘```` 烦烦烦信息
探索自动驾驶数据集新维度:Lyft 的 NuScenes DevKit 项目地址:https://gitcode.com/lyft/nuscenes-devkit 在自动驾驶领域,高质量、多模态的数据集是推动技术创新的关键。NuScenes DevKit 是由 Lyft 创造的一个...
如果用到CAN bus expansion(自车信息ego status),下载解压之后放在哪可以根据具体情况决定,比如我之前复现的一篇论文放在了与nuscenes同级的目录。如果下载了Map expansion,则需要先在nuscenes目录下新建一个...
nuScenes 数据集解析
标签: 自动驾驶
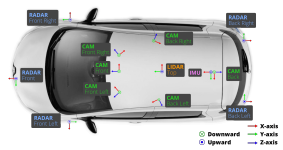
nuScenes 数据集解析 nuScenes数据集 是自动驾驶公司nuTonomy建立的大规模自动驾驶数据集,该数据集不仅包含了Camera和Lidar,和radar数据。作为3D目标检测,我们使用算法的时候看一下数据集的构造。 数据集下载...

用于KITTI / NuScenes对象检测的第二个用于KITTI / NuScenes对象检测的第二个(1.6.0 Alpha)SECOND检测器。 “ Alpha”表示可能存在许多错误,配置格式可能会更改,spconv API可能会更改。 仅支持python 3.6 +,...
领取自动驾驶近15个方向学习路线>>点击进入→自动驾驶之心『端到端自动驾驶』技术交流群论文作者|Diankun Zhang编辑 | 自动驾驶之心写在前面&出发点端到端的范式使用统一的框架在自动驾驶系统中实现多任务...
自动驾驶nuscenes数据集
标签: 自动驾驶
自动驾驶nuscenes数据集
本文为CSDN原创,转载请表明原文出处。
另外,由于NuScenes数据集采集数据时是使用的32线扫描式激光雷达,这种雷达的点数实在是有限,和现在市场上自驾使用的128线扫描式激光雷达或固态激光雷达的密集点云比,成像效果真是太差了!因为采集数据的自车是...
1.nuScenes数据集(发音为/nuːsiːnz/)是由Motional(前身为nuTonomy)团队开发的大规模自动驾驶公共数据集。下面基本上都是这样的操作,具体可以参考nuscenes官网官方教程也可以参考...


nuScenes 数据集 (pronounced /nu:ːsiː:nz/) 是由 Motional (以前称为 nuTonomy) 团队开发的自动驾驶公共大型数据集。nuScenes 数据集的灵感来自于开创性的 KITTI 数据集。nuScenes 是第一个提供自动驾驶车辆整个...
推荐文章
- Springboot——mybatis配置_springboot配置mybatis-程序员宅基地
- 计算机网络体系结构-程序员宅基地
- 韶音、南卡、Oladance开放式耳机值得买吗?多维度测评实力最强品牌-程序员宅基地
- bert简介_tensorflow 2.0+ 基于BERT的多标签文本分类-程序员宅基地
- jupyter notebook常用快捷键和语法_jupyter notebook怎么换行-程序员宅基地
- 教材编者,请多点儿“钻研”精神-程序员宅基地
- MySQL如何更改数据库名字_mysql update数据库名称-程序员宅基地
- windows上最好用的文件管理软件 Directory Opus_directory ops-程序员宅基地
- AWT图形界面设计编程——1.AWT容器_awt容器定义-程序员宅基地
- 一文看懂mybatis底层运行原理解析-程序员宅基地