”orb-slam2“ 的搜索结果

VI_ORB_SLAM2:基于ORB-SLAM2的单目/立体视觉惯性ORB-SLAM 该存储库包括Visual-Inertial ORB-SLAM的Monocular版本和Stereo版本。 这两个是的和的。 有关详细信息,您可以参考Examples/Monocular/mono_euroc_VI.cc和...
文章参考部分开源代码和报错文章。
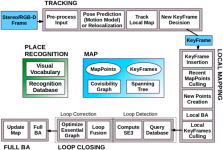
ORB-SLAM2是一种基于单目、双目和RGB-D相机的实时视觉SLAM系统,用于在无GPS信号或有限的传感器信息情况下,构建三维地图并定位相机的位置和姿态。ORB-SLAM2采用了ORB特征点提取和描述符匹配技术,以及图优化和闭环...

ORB-SLAM2(中文注释版) 评论员: 作者: , , 和 ( ) 2017年1月13日:现在支持OpenCV 3和Eigen 3.3。 2016年12月22日:添加了AR演示(请参见第7节)。 ORB-SLAM2是用于单目,立体声和RGB-D相机的实时SLAM库...
基于orb-slam2的主动SLAM方法
ORB-SLAM2代码阅读思维导图,xmind8编辑,可用xmind8或者xmind zen打开。自己做的,可能有错误,如果有问题可直接私信给我。 ORB-SLAM2 是我上手的第一个比较大的SLAM系统和c++项目,因此方便建立了思维导图更深的...
针对目前视觉SLAM(同时定位与地图构建)系统只能输出相机的运动轨迹图而不能生成用于路径规划和导航地图的缺点,提出了一种基于ORB-SLAM2的网格地图实时构建算法。首先,建立了一个适用于视觉SLAM的逆传感器模型...
ORB-SLAM2程序思维导图
《ORB-SLAM2源码解析》学习手册v1.0-对外.pdf.pdf
ORB-SLAM2源码详解尽管可以用于立体视觉,ORB-SLAM2主要是单目SLAM系统,也就是只有一个相机(摄像头)的系统,主要用于特征识别,自主导航。ORB-SLAM2的硬件传感器也就是这一种,当然也可以加入其它传感器,比如IMU...
《ORB-SLAM2源码解析》学习手册v1.0-对外.pdf

仅使用pcl构建ORB_SLAM2模式 mkdir build cd build cmake .. make -j 跑步: ./run/rgbd_tum Vocabulary/ORBvoc.bin path_to_settings path_to_sequence path_to_association 修改内容: 添加一个具有闭环功能...
东北大学吴博讲解ORB_SLAM的文档,仅有文档。
Android上基于ORB-SLAM2的AR介绍这是一个基于和OpenGL的Android增强现实APP。 演示视频可以在下面的链接中找到。 演示视频依赖关系,安装和使用要运行此APP,您需要将./SLAM文件夹复制到您的手机中,其中包含词汇表...
本仓库为学习orb-slam2时收集的部分资料,包含参考论文(上面有当时学习时的笔记),注意事项请参考以下note部分,注释版本的ORB-SLAM2代码在ORB_SLAM2仓库可以克隆下来。文件/文件夹含义: 参考论文:包含了orb-...
适用于单目、双目、rgb-d摄像机视觉slam代码orb-slam2
ORB-SLAM 2跑通自己的数据集一 、拍摄视频并转化为图片:二、准备索引目录文件:三、生成自己的参数配置文件TUM.yaml。复制TUM1.yaml,并修改参数即可。四、ORB-SLAM2所在的目录并运行如下命令即可:五、本次实验...
GitHub ar上的ORB-SLAM2代码为是开放源代码,并被用作支持其论文ORB-SLAM2的概念证明:ORB-SLAM2:一种用于单目,立体声和RGB的开源SLAM系统-D相机。 ORB-SLAM2不是最终产品。 它会生成地图,但是无法将其保存到...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨小深来源丨深话AI本文总结了特征点法SLAM中目前效果最好的方法:ORB-SLAM2 / ORB-SLAM3 相关改进代码汇总,...
ORB-SLAM2算法1 已成功编译安装ORB-SLAM2到本地,本篇目的是用EuRoc开源数据来运行ORB-SLAM2,并生成轨迹,最后用evo评估工具来评估ORB-SLAM2生成的轨迹和真值轨迹。
视觉SLAM经典文章,学好SLAM,前途无量,好好学哦。。
ORB-SLAM2算法1已成功编译安装ROS版本ORB-SLAM2到本地,本篇目的是用EuRoc、TUM、KITTI开源数据来运行ROS版ORB-SLAM2,并生成轨迹。
C++开发基于LK光流法代替ORB-SLAM2中的特征点提取匹配法来跟踪关键点源码+使用说明.zip C++开发基于LK光流法代替ORB-SLAM2中的特征点提取匹配法来跟踪关键点源码+使用说明.zip C++开发基于LK光流法代替ORB-SLAM2中的...
1. 地图点相关 3. 用参考关键帧来跟踪 1. 理解地图点里成员变量的物理意义 2. 掌握BOW的原理及应用(重要) 3. 掌握关键帧跟踪原理(重要) 4.
本文主要包括Ubuntu20.04系统下,并已安装对应的ROS-noetic机器人系统,在此基础上如何一步步安装ORB-SLAM2的依赖库,比如OpenCV,Eigen3,Pangolin,最后安装非ROS版本和ROS版`的ORB-SLAM2,以及安装过程中遇到的...
本文主要对ORB-SLAM2的整体框架,System主类和多线程进行学习和总结。
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地