”pl-slam“ 的搜索结果
探索PL-SLAM:一款高效、易用的视觉SLAM框架 项目地址:https://gitcode.com/rubengooj/pl-slam 项目简介 PL-SLAM 是一个由Ruben Gooijer开发的开源项目,它是一个轻量级的结构化光 SLAM(Simultaneous Localization ...
视觉SLAM(Simultaneous Localization and Mapping)算法主要用于机器人和自动导航系统中,用于同时进行定位和建立环境地图。这种算法依赖于相机来捕捉环境数据。根据视觉SLAM的具体需求和应用场景,可以使用不同...


首先贴出pl-slam readme的第一句话:对pl-slam的精度不要有太高要求。 Notice that this repository is only an open-source version of PL-SLAM released with the aim of being useful for the community, however...
ubuntu16.04安装运行PL-SLAM-附件资源
基于改进关键帧选取策略的快速PL-SLAM算法.docx
Ubuntu16.04中PL-SLAM的N次踩坑安装总结 PL-SLAM安装Ubuntu16.04中PL-SLAM的N次踩坑安装总结1.安装思路参考链接2.ROS安装2.1 删除init文件2.2 update失败解决3.OpenCV安装3.1 opencv3.3.1安装过程3.2 安装所需要依赖...

SLAM_良好线切割_转为PL-SLAM等线辅助VSLAM设计的增强模块_辅助姿态优化_优质项目实战




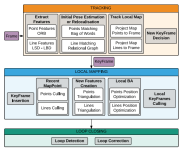
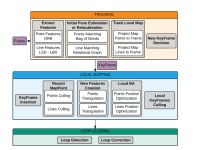
大家好,对于VSLAM研究人员当然要对最新的VSLAM的研究做下总结了,这次为大家介绍PL-SLAM。 上图就是PL-SLAM的框架,是不是感觉和ORBSLAM很像呢?比较典型打特征法+直接法的结合的关键帧的Vslam 跟ORBSLAM有三个...


作者开源的代码地址:https://github.com/rubengooj/pl-slam 在安装相关库和项目的过程中出现了不少问题,记录在此. 以下整体上按照代码内README.md的安装流程进行,... MRPT和stvo-pl解压至pl-slam同级文件夹下,...



pl-slam 运行日志
标签: ubuntu
PL-SLAM 报错解决
PL-SLAM是基于ORB-SLAM2框架和LSD(Line segment Detector)来做的SLAM,主要是结合点线特征,提高SLAM在环境中运行的可靠性。基本框架与ORB-SLAM2一致,好似并行地添加了点和线的特征。最近看了几篇用线特征做SLAM ...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨小深来源丨深话AI本文总结了特征点法SLAM中目前效果最好的方法:ORB-SLAM2 / ORB-SLAM3 相关改进代码汇总,...
1、PL-VIO PL-VIO是在VINS-Mono的基础上,添加了线特征,并且取得了不错的效果.缺点是线特征的提取匹配所需要的时间比较长. github: https://github.com/HeYijia/PL-VIO 论文:PL-VIO: Tightly-Coupled Monocular ...
推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地