
”px4“ 的搜索结果

px4固件v1.11.0,我已下载更新好所有子模块,免去了翻墙改文件等一堆麻烦,下载即用

PX4装机教程(八)常用硬件
标签: 人工智能

PX4固件源码,亲测可编译
标签: PX4
PX4固件源码,亲测可编译
PX4基础部分详解
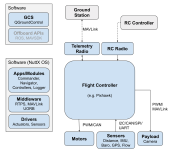

PX4从放弃到精通(四):PX4架构
标签: 架构

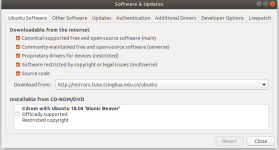
此教程,基于Ubuntu18.04 安装PX4仿真环境
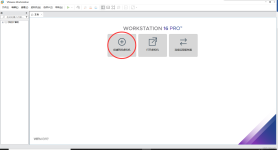
从Simulink到PX4——Simulink-PX4插件安装与环境搭建前言0 准备工作1 安装WSL2 Setting up the PX4 Toolchain on Windows3 Setting up the PX4 Tool Chain on Linux4 Downloading PX4 Source Code5 构建代码6 ...





而px4则是一款常见的开源飞控固件,是自主无人机系统开发中非常常用的飞控固件。但是其对应的硬件往往都比较贵,即使是早期的pixhawk版本也要600+。 如果要开发一款廉价自主无人机系统,那么采用F4/F7/H7飞控硬件...
飞控型号:cube orange【PX4官方用户指南中关于cube orange的描述】 飞控载板型号:Mini Carrier Board【迷你载板说明文档】 固件安装参考:The Cube User Manual V1.0

PX4代码解析(1)
标签: c++


搭建无人机仿真环境之PX4安装
标签: linux
PX4安装安装依赖包下载固件git submodule update --init --recursive中遇到的问题make posix_sitl_default gazebo中遇到的问题 安装依赖包 sudo apt install -y \ ninja-build \ exiftool \ python-argparse \ ...



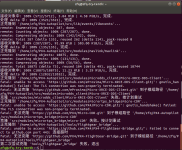
详细探索步骤参考:【PX4学习笔记】3. PX4 固件烧写(1 探索过程) 第一步(缺少此步会报错头文件不存在): sudo make cubepilot_cubeorange_console 第二步: sudo make cubepilot_cubeorange_default upload ...
推荐文章
- Java学到什么程度才能叫精通?_java数据结构与算法学到什么程度-程序员宅基地
- 死磕源码系列【springboot之ServletContextInitializer接口源码解析】-程序员宅基地
- arduino库函数WiFiEsp的使用(一)_小绿科技wifi库函数-程序员宅基地
- yolov3模型转换caffes实践之安装caffe-程序员宅基地
- 【Qt】数据类型和有用的数据操作类_qset初始化-程序员宅基地
- 【论文简述】DSC-MVSNet: attention aware cost volume regularization based ondepthwise separable(CIS 2023)-程序员宅基地
- Elasticsearch 安装的时候,Unsupported major.minor version 51.0问题的解决-程序员宅基地
- 关于笔记本电脑飞行堡垒风扇不能打开的解决办法_飞行堡垒7风扇模式怎么开-程序员宅基地
- 设置笔记本电脑插入USB鼠标时,自动禁用触摸板_有usb鼠标时,则自动禁用触摸板-程序员宅基地
- Http请求状态码-416_http 416-程序员宅基地