import tensorflow as tf import numpy as np x_data = np.random.rand(100).astype(np.float32) y_data = x_data*3 + 0.3 # Variable 表示可变,可训练变量 Weights = tf.Variable(tf.random_uniform([1], -1.0, ...
”tf“ 的搜索结果
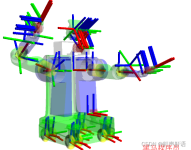
是一个在ROS(Robot Operating System)中广泛使用的包,用于处理机器人的坐标变换。它允许用户跟踪多个坐标系随时间的变化,并且在这些坐标系之间轻松转换。应该是你的机器人和环境中实际存在的坐标系。...
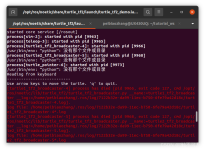
tf入门教程 1. 引言 本节将告诉你tf可以做什么, 将使用turtlesim来展示它的威力. 接下来也将涉及到tf_echo, view_frames, rqt_tf_tree和rviz的使用. 首先安装必须要的packages $ sudo apt-get install ros-...
ROS——一文读懂:tf变换
标签: 自动驾驶

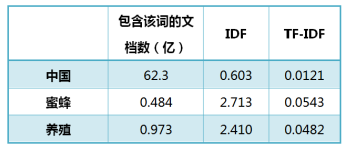
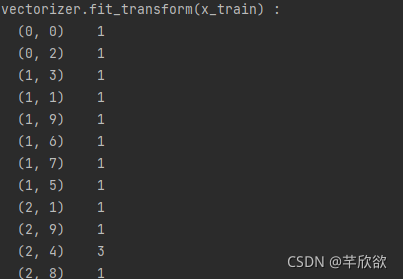
1、TF-IDF算法介绍 (1)TF是词频(Term Frequency) (2) IDF是逆向文件频率(Inverse Document Frequency) (3)TF-IDF实际上是:TF * IDF 2、TF-IDF应用 3、Python3实现TF-IDF算法 4、NLTK实现TF-IDF算法 5...
本文主要讲解了如何利用tensorboard对tf进行可视化,保存训练过程中产生的日志,并对日志进行可视化。通过loss、accuracy的可视化可以进一步判断模型的训练效果
tflite是谷歌自己的一个轻量级推理库。主要用于移动端。使用的思路主要是从预训练的模型转换为tflite模型文件,拿到移动端部署。源模型可以来自tensorflow的saved model或者frozen model,也可以来自keras。

一、TF-IDF的由来 二、什么是TF-IDF? 2.1 TF(Term Frequency) 2.2 IDF(Inverse Document Frequency) 2.3TF-IDF(Term Frequency-Inverse Document Frequency) 三、TF-IDF应用 四、代码实现 4.1 常规Python...
本文主要介绍了tf第十讲:TFRecord(tf.train.Example&tf.train.SequenceExample),希望能对学习TensorFlow的同学有所帮助。 本文讲述了tf中TFRecord的使用,TFRecord是一种二进制数据格式,使用该格式的数据可以...
本文主要介绍了tf第七讲:模型保存与加载(tf.train.Saver()&tf.saved_model)及fine_tune(梯度冻结),希望能对学习TensorFlow的同学有所帮助。 本文讲解了tf中模型保存和加载的方法,方法共两种。一种为tf.train....
TF-IDF(Term Frequency-Inverse Document Frequency, 词频-逆文件频率)是一种用于资讯检索与资讯探勘的常用加权技术。TF-IDF是一种统计方法,用以评估一字词对于一个文件集或一个语料库中的其中一份文件的重要程度。...
tensorflow lite 量化
关于ros --tf2的使用
标签: c++
在tf2系统中,将包分为tf2和tf2_ros。tf2用来进行坐标旋转,以及tf、msg两种四元素数据结构的变换;tf2_ros负责与ROS数据通信打交道,负责发布tf或订阅tf,即发布者和订阅者是在tf2_ros命名空间下的。1、tf2 (姿态...
tf.keras.Model类 tf.keras.Model类将定义好的网络结构封装入一个对象,用于训练、测试和预测。在这一块中,有两部分内容目前我还有疑惑,一个是xxx_on_batch三个方法,为什么要单独定义这个方法,而且train_on_...
tf.reshape
本篇文章将对tf2的一些常用函数及类进行记录,以方便以后...geometry2包里有几个文件夹,分别为 tf2 | tf2_bullet | tf2_eigen | tf2_geometry_msgs | tf2_kdl | tf2_msgs | tf2_py | tf2_ros | tf2_sensor_msgs | tf2_
假设现在有一个函数f(x)需要多次调用,其中包含一个变量v。我们希望在第一次调用时定义变量v,在后续调用时共享这个变量v。为了避免重复定义变量,我们可以使用来控制变量是否可重用在比如结合可以看到:当我们开起...
上一篇文章py_function中提到一些自定义操作可以通过 py_function 实现,其中就涉及 If-else,其实条件判断也可以通过 tf.cond 实现,下面看一下如何使用。 二.tf.cond 1.函数 根据 pred 的值决定使用 true_fn ...
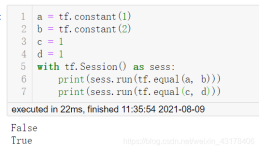
tf.constant( value, dtype=None, shape=None, name='Const' )
本内容主要介绍 TF-IDF 算法,以及 Python 实现。
本博文主要汇总了自己在使用ROS中tf坐标变换包时查找的一些参考资料和博客,包括了tf和部分tf2的使用,在此感谢所有博客中出现的博客链接! 参考资源: ROS官网详细介绍: http://wiki.ros.org/tf/Tutorials ...
Arithmetic Operatorstf.add、tf.subtract、tf.multiply、tf.scalar_mul、tf.div、tf.divide、tf.truediv、tf.floordiv、tf.realdiv、tf.truncatediv、tf.floor_div...
ROS学习(22)TF变换
标签: ROS

推荐文章
- NSFuzz:TowardsEfficient and State-Aware Network Service Fuzzing-程序员宅基地
- 刘睿民畅谈大数据:政府应紧急设立首席数据官-程序员宅基地
- nginx 编译安装依赖包_nginx编译怎么添加新的依赖库-程序员宅基地
- Python+OpenCV+Tesseract实现OCR字符识别_python + opencv + tesseract-程序员宅基地
- 微型计算机主板上的主要部件,微型计算机主板上安装的主要部件-程序员宅基地
- 推荐一款可匹敌国际大厂的国产企业级低无代码平台_国产私有化 无代码-程序员宅基地
- UE4 蓝图 实现 数组的边遍历边删除_ue4 数组删不掉-程序员宅基地
- python爬虫之bs4解析和xpath解析_from bs4 import beautifulsoup xpath-程序员宅基地
- MySQL配置环境变量-程序员宅基地
- VGG16进行微调,训练mnist数据集_vgg16 tensorflow 2 mnist-程序员宅基地