
”urdf“ 的搜索结果
ROS 包,可以从 Kinect 深度图像中过滤 URDF 模型中定义的几何图形。还可以为 OpenNI 跟踪器预处理数据,以删除背景、机器人等。 realtime_urdf_filter 这个包为深度图像提供了 OpenGL 加速的、基于着色器的过滤。...
rviz2 显示urdf
标签: 人工智能
rviz2



ROS入门 6.3.3 URDF语法详解03_joint 《ROS入门-理论与实践》视频教程镇楼 joint urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 ...
ROS学习 URDF建模
标签: ubuntu
urdf:存放机器人模型的URDF或xacro文件 meshes:存放URDF中引用的模型渲染文件 launch:保存相关启动文件 config:保存rviz的配置文件 在launch目录中建立启动文件 <launch> <param name="robot_description...
Mujoco 中urdf转xml
标签: 机器学习
Mujoco 中urdf转xml 1.urdf中加入以下文件: <link name="dummy"> </link> <joint name="dummy_joint" type="fixed"> <parent link="dummy"/> <child link="base_link"/> </...
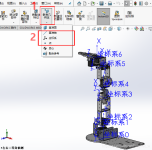
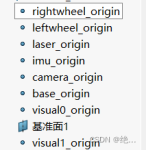
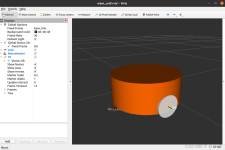
Solidworks导出URDF模型_四处炼丹的博客-程序员宅基地_solidworks urdf。利用Solidworks导出URDF模型用于gazebo仿真环境中。Solidworks导出URDF模型。

URDF机器人建模URDF机器人建模的介绍URDF的概念URDF机器人模型的内容URDF机器人模型的标签说明 URDF机器人建模的实现创建URDF功能包编辑launch启动文件创建URDF模型创建小车底盘(圆柱体)创建左侧车轮创建右侧...
小车+摄像头urdf文件,带中文注释 因为运行一些关节joint节点的urdf,需要用到joint_state_publisher和robot_state_publisher节点,这两个节点与中文注释冲突,所以需要把urdf的文件的中文注释删掉才能运行,但我不...
在gazebo中使用urdf
标签: 机器学习
urdf: unified robotic description format. urdf是在ros中使用的一种用于描述机器人的xml文件。 为了在gazebo中使用urdf文件, 需要增加一些仿真用的tag。 实际上在底层, gazebo还是自动把urdf转成了sdf文件。 ...
在ros创建并优化URDF模型
ros创建urdf模型文件
标签: 机器人
ros创建urdf模型文件

1. rviz内显示运动效果 参考:urdf/Tutorials/Using urdf with robot_state_publisher - ROS Wiki 2. gazebo内显示运动效果 使用gazebo_msgs::LinkState进行控制
创建自己的URDF文件 1.1创建树形结构文件 在这部分教程中要创建的将是下面的图形所描述的机器人的urdf文件 图片中这个机器人是一个树形结构的。让我们开始非常简单的创建这个树型结构的描述文件,不用担心维度等...

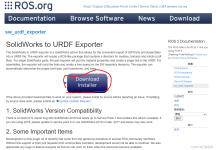
solidworks导出urdf教程 1.安装solidworks 见网络教程:...

<?xml version="1.0"?> <robot name="mbot" xmlns:xacro=... <...-- PROPERTY LIST -->...xacro:property name="M_PI" value="3.1415926"/>...xacro:property name="base_mass
toydog_bade.urdf
文章目录1. link 标签包含的元素2. xacro1) 常量定义与使用2) 数学3) 宏定义示例:Node: 1. link 标签包含的元素 <visual>:定义在图形界面观察到的图形,图形通过子标签<geometry>...
推荐文章
- 【Java进阶】线程池之无限队列 - 使用工厂类Executors.newFixedThreadPool(n) ,创建无限队列线程池_线程池无限队列-程序员宅基地
- python 之路,致那些年,我们依然没搞明白的编码-程序员宅基地
- 国二报C语言,国二C语言.doc-程序员宅基地
- FTP快速搭建-程序员宅基地
- [原创]我的WCF之旅(7):面向服务架构(SOA)和面向对象编程(OOP)的结合——如何实现Service Contract的继承_servicecontract using-程序员宅基地
- openmediavault(OMV) (18)云相册(2)photoprism-程序员宅基地
- VS2017使用protobuf动态链接库的编译错误问题_vs2017运行不了protobuf项目-程序员宅基地
- idea右键项目没有出现git选项、idea工具栏没有Git快捷图标_idea 右键没有git-程序员宅基地
- m3u8索引文件介绍_69嗉媂x.m3u8-程序员宅基地
- 2021 泰迪杯 A 题_第十二届泰迪杯数据挖掘竞赛a题论文-程序员宅基地