ROS机器人建模URDF语言教程
标签: URDF
ROS机器人建模URDF语言教程. 本材料将介绍URDF的概念, 基础使用方式, 高级使用方式, 实践案例.
标签: URDF
ROS机器人建模URDF语言教程. 本材料将介绍URDF的概念, 基础使用方式, 高级使用方式, 实践案例.
女武神机器人 该软件包为NASA Valkyrie机器人提供了一种创建RigidBodyDynamics.Mechanism的简便方法。
只要 Omniverse Isaac Sim 中的材料、物理和关节属性是可用的,并且有匹配的类别,URDF 导入程序就会自动导入。但是,如果没有可用的或匹配的类别,或者两个系统的单位不同,自动填入的内容可能不准确,并会改变...
机器人运动控制以及里程计信息显示
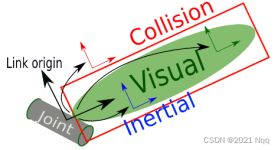
origin 元素通常在定义连接件 (joint) 和视觉/碰撞几何 (visual/collision) 时使用。
惯性计算器 该项目计算 ROS 中 URDF 文件所需的惯性值。
filename="base_link.STL" />中出现的模型前缀全部删除。1.在后面加。
Solidworks导出URDF模型及实践过程中遇到的问题
基于自由度机械臂,模型使用solidworks导出urdf格式的matlab仿真源码(课程设计).zip已获导师指导并通过的97分的高分课程设计项目,可作为课程设计和期末大作业,下载即用无需修改,项目完整确保可以运行。...
RoboMaster 视觉自瞄系统所需的 URDF - 不懂运行,下载完可以私聊问,可远程教学 该资源内项目源码是个人的毕设,代码都测试ok,都是运行成功后才上传资源,答辩评审平均分达到96分,放心下载使用! <项目介绍> 1、...
目前在参加比赛,后续继续需要研究ros2的导航包使用,最终完成我们参赛作品的导航功能,期间会不定时的更新学习的内容。
标签: SW URDF
SW2URDF安装包
在阅读本文之前,推荐阅读前篇ROS机器人TF基础和全部资料文档: ...所有内容均在ROS1 indigo,kinetic,melodic,noetic以及ROS2 dashing,foxy等测试通过。 但介绍以noetic和foxy为主。 在ROS中自定
URDF集成Gazebo实操
学习写urdf有几个地方需要注意 一定要记住它使用的是右手坐标系。x正方向朝左, y 正方向向内, z轴正方向朝上 构建树结构, 即写link和joint 每个link的参考坐标系都在它的底部,并与关节的参考坐标系正交,为了...
URDF集成Gazebo
博客中的代码。内容:要建立自己的自主机器人,首先,... part 3.1 机器人URDF模型机器人URDF模型主要由两个文件组成:.xacro 是主文件,包含URDF项,包括关节,连杆;.gazebo包含gazebo的具体信息以便在gazebo中仿真。
文章目录前言一、功能作用说明URDFSRDF二、样例文件说明URDF文件例子SRDF文件例子总结 前言 URDF全称为Unified Robot Description Format,中文可以翻译为“统一机器人描述格式”。与计算机文件中的.txt文本格式、....
标签: python
统一机器人描述格式(URDF)是描述机器人模型的 XML 文件,支持Xacro(XML宏),使用Xacro来引用已经存在的XML块,创建更短且可读的XML文件。
自定义规划组名称(Group Name),...ROS2也可以在windows系统中应用,有兴趣的同学可以试试。选择 Configuration Files,点击Brows选择以上建立的elite_ec66_moveit_config 文件夹,将生成的文件放在这个文件夹里。
用于12 DOF四足机器人的ROS驱动程序。 项目页面:http: 逆运动学走

URDF 文件是一个标准的 XML 文件关于gazebo标签,后期在使用 gazebo 仿真时,才需要使用到,用于配置仿真环境所需参数,比如: 机器人材料属性、gazebo插件等,但是该标签不是机器人模型必须的,只有在仿真时才需设置...
标签: URDF
文章目录构建机器人系统URDF机器人建模 构建机器人系统 执行机构的实现 机器人底盘,电机,舵机 驱动系统的实现 电源子系统,电机驱动子系统,传感器接口 内部传感系统的实现 控制系统的实现 外部传感系统的...
racecar.urdf