”urdf“ 的搜索结果
urdf文件中origin的含义
标签: 机器人
B的origin指他自己的几何中心的位置,假设c是一个长方体,几何中心是dotC. A是一个球体,几何中心是dotA,那么origin就是点dotC,而origin的值就是以dotA为参考系的。比如:linkA---->jointB---->linkC.


我们可用urdf在rviz中搭建三维模型。

关于URDF文件的一些记录
标签: ROS2
以下记录一些关于本人对一些概念的理解,不保证正确,仅供参考。

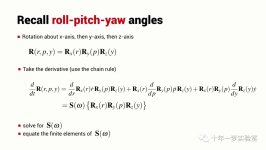
HW04-urdf-gazebo-solns.pdf

1.说明 3D立体渲染为每只眼睛显示不同的视图,因此场景看起来具有深度。 如果您有支持立体声的显示器和支持立体声的图形卡,则可以让Rviz以立体声呈现其视图。 本教程介绍了如何完成此操作。 2.硬件要求 ...
Dobot Magician urdf文件
[ROS] URDF 模型,关节类型(joint) 文章目录[ROS] URDF 模型,关节类型(joint)1. Fixed Joint(固定关节)1. 创建一个 link1,box 形状,尺寸(0.1, 0.2, 0.3)2. 创建一个link2,box 形状,尺寸(0.05,0.1...
ROS入门 6.3.4 URDF练习 《ROS入门-理论与实践》视频教程镇楼 需求描述: 创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径...

从官网找到的关于桌子的宏文件,配合我的blog讲解。 http://blog.csdn.net/shankezh/article/details/51680125
转urdf和dae

URDF建模一、URDF建模方法二、从零写一个移动机器人URDF模型三、从零写一个机械臂URDF模型 一、URDF建模方法 URDF(Unified Robot Description Format),统一机器人描述格式,包含link和joint以及相关属性描述文件。 ...

sw怎么导出闭环结构的urdf模型啊?下图是之前导出的在matlab显示,一层层重叠的本是同一个零件,结果重复了
解决SW2URDF得到的urdf在pybullet中无法显示设定颜色的问题



完成自建小车URDF的导航 0. 创建自己的工作区 打开终端: mkdir -p mycar_ws/src cd mycar_ws/src catkin_create_pkg mycar_descriptions cd mycar_ws catkin_make 最后在.bashrc中添加环境变量 gedit ~/....
模型文件的导出转换需要用到ROS官网中的sw_urdf_exporter插件,打开网站“http://wiki.ros.org/sw_urdf_exporter”,点击“Download Installer”进入版本选择下载安装最新版本下的“sw2urdfSetup.exe”,下载完成后...
因为研究机器人仿真,需要将三维CAD建模软件里创建好的模型的信息导出为URDF文件,因此使用SolidWorks to URDF Exporter这款solidworks插件。然后会跳转到github网页,根据自己solidworks的版本选择对应的插件版本。...
推荐文章
- vuex中state对象会数组中的值更新后getters没有监听到state数据的改变的问题state数据跟新页面不刷新问题_vue对象数组改变元素没有getter-程序员宅基地
- 《Centos7——手动部署prometheus》_prometheus centos7-程序员宅基地
- iOS 数据保存几种方式总结_苹果ld都会保留那些数据-程序员宅基地
- quartus生成qdb文件_quartus 生成qxp和vqm文件的方法-程序员宅基地
- Servlet学习笔记3,及回忆。_attributeadded(servletrequestattributeevent ev)方法的-程序员宅基地
- cv::putText详解-程序员宅基地
- tomcat优化_tomcat ajp端口干嘛用的 关闭会怎么样-程序员宅基地
- (UVA)11916 Emoogle Grid-程序员宅基地
- 指针_定义一个指针变量他的值是多少-程序员宅基地
- 《Java基础——异常的捕获与抛出》_java捕获异常和抛出异常-程序员宅基地