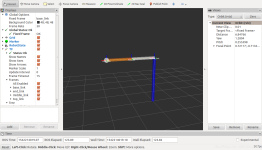
SolidWorks转urdf导出模型错位解决
”urdf“ 的搜索结果
ros操作系统中将URDF文件集成到Gazebo中的基本流程
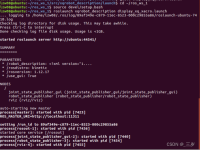
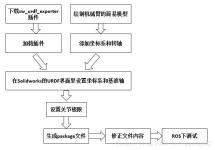
在命令行终端转到catkin_myrobot文件夹并进行编译(根据个人人爱好编译也可使用catkin_make install命令以生成install文件夹)将生成的完整urdf文件夹复制到新建立的src文件下,此处尽量不要改动文件夹名称,使其与...
建模练习2 —— 手写一个机械臂的urdf模型 1.在catkin_ws/src下,创建功能包 catkin_create_pkg marm_description urdf xacro 在功能包中建立urdf、meshes、launch、config这四个文件夹,分别用于存放特定的文件 接...
创建gazebo仿真的功能包。 catkin_create_pkg mybot_gazebo gazebo_plugins gazebo_ros gazebo_ros_control roscpp rospy 1 为link添加惯性参数和碰撞属性 inertial:惯性参数 collision:碰撞属性 ...

建造属于你的无人驾驶车! 本专栏持续更新中… ...XACRO模型相比于URDF模型有很多优势,我这边均未使用,因为Solidworks已经导出了大量文件,个人认为在该URDF模型中加入必要插件和描述即可。即本文不适合用来学习XAC

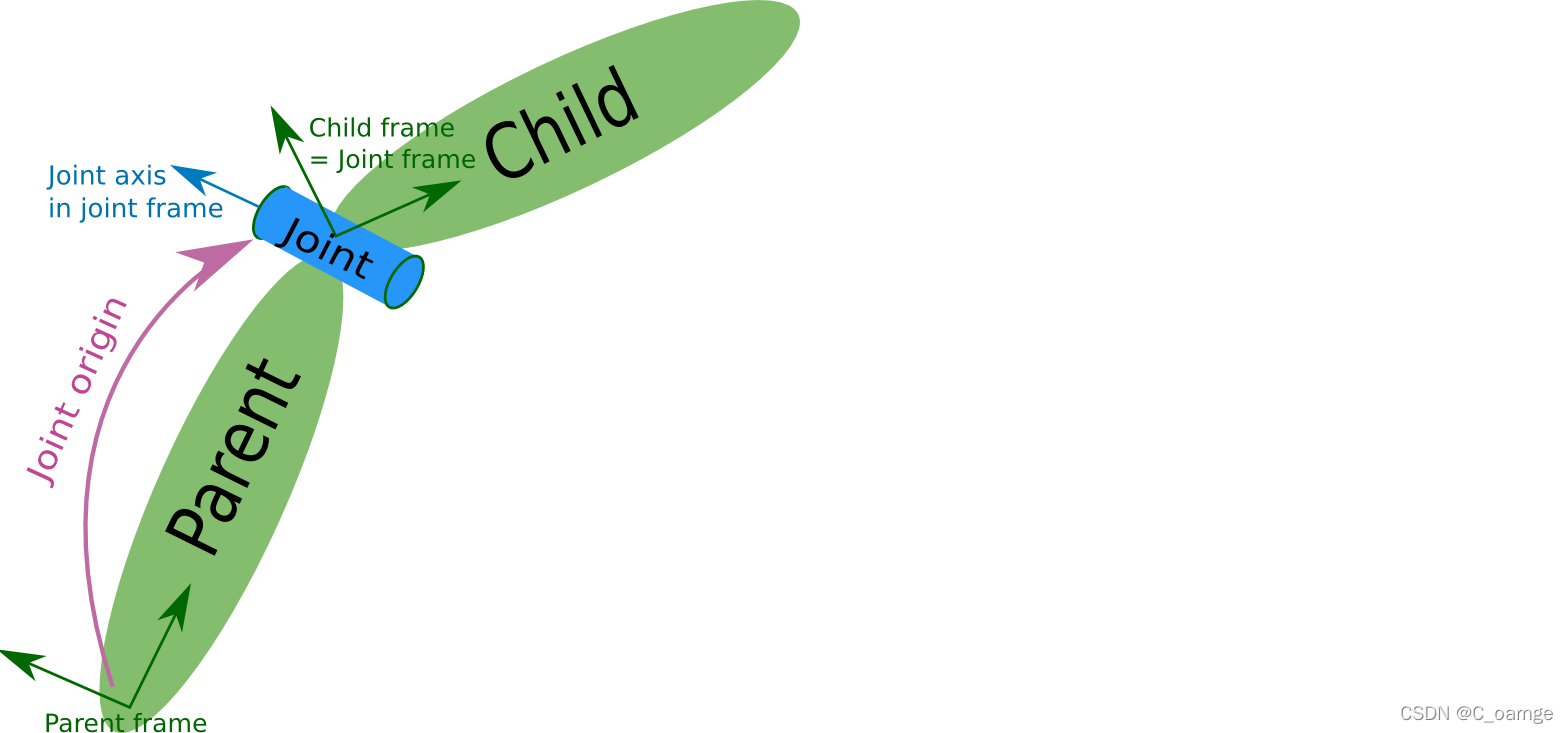
什么是URDF机器人建模 Unified Robot Description Format:统一机器人描述格式 使用XML格式描述机器人模型 由n个link连杆和n个joint关节描述 二. Link和Joint详解 link内容 描述机器人某个刚体部分的外观和物理...
问题遇到的现象和发生背景 在pybullet加载URDF模型,该URDF由一个link组成,采用obj模型。该obj模型采用了多个不同颜色的材质。把URDF加载到pybullet后,缺只显示obj文件中最后一个材质,并且其他所有的面也都显示该...
URDF(Unified Robot Description Format)是ROS中使用的一种机器人描述文件,它以HTML的形式定义一个机器人。...将SolidWorks环境下设计好的图纸转化为urdf文件,便可将该模型放在gazebo里仿真以及完成后续工作了
ROS仿真--URDF
标签: 经验分享
虚拟机打开摄像头会导致蓝屏,解决错误中

【ROS-Gazebo】SDF与URDF的相互转换 小明工坊 机甲电光大师 | Master of Machatronic 1 人赞同了该文章 前言 这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是...

(仿真)创建 URDF 机器人模(1)
mdh to urdf
标签: 算法
urdf文件中要求的是[x, y, z, rx, ry, rz]的表达形式,但是通常机械臂用mdh表示相邻坐标系关系。各大厂商对机械臂标定后通常也是给出dh参数表。 xacro文件支持python的数学运算库,基于此,编写以下转换函数用于[a ...

URDF语法检查工具使用,check_urdf yourrobot.urdf urdf_to_graphiz yourrobot.urdf

文章目录==创建工作空间====创建urdf文件====编辑urdf====代码讲解====编辑urdf配套meshes文件夹里====编辑urdf配套launch文件====运行launch文件====URDF--统一机器人描述格式==link标签joint标签==URDF功能包====...
3:使用gazebo建立sdf文件fine,也就是ros1里面的world文件,现在后缀...4:把urdf文件转换为sdf文件good。2:把xacro文件转换为urdf文件。6:使用launch文件加载sdf文件。这个文件只用于加载模型。1:编写xacro文件。
1. URDF建模原理URDF是一种使用XML格式描述的机器人模型文件Links:坐标系与几何关系Joints:Links之间的关系标签描述机器人某个刚体部分的外观和物理属性;描述连杆尺寸、颜色、形状、惯性矩阵、碰撞属性等;每个...

推荐文章
- Response使用 application/octet-stream 响应到前端_application/octet-stream;charset=utf-8-程序员宅基地
- 利用MultipartFile实现文件上传_实现了multipartfile file上传文件时要选择一个栏目,传给后端一个栏目id,如何实现-程序员宅基地
- muduo之Singleton_muduo singleton-程序员宅基地
- html5 动态存储 localStorage.name 和localStorage.setItem()的差别_localstorage.setitem('aa')和localstorage.aa一样吗-程序员宅基地
- 02.loadrunner之http接口脚本编写_http脚本-程序员宅基地
- The server time zone value ‘�й���ʱ��‘ is unrecognized or represents more than one time zone.-程序员宅基地
- 如何打造企业短视频账号的人设?_做的比较有人格化的公司短视频账号-程序员宅基地
- 一个会做饭的程序员如何每天给女朋友带不同的便当?-程序员宅基地
- PendingIntent重定向:一种针对安卓系统和流行App的通用提权方法——BlackHat EU 2021议题详解 (下)_getrunningservicecontrolpanel-程序员宅基地
- python 之 面向对象(反射、__str__、__del__)-程序员宅基地