3D重建的进阶了解---深度图,网格,体素,点云是什么https://www.cnblogs.com/lainey/p/8547056.html还有3D建模的一些初步了解:用一组图片来做3D reconstruction需要的算法: SFM(Structure from motion),也就是从...
”visualsfm“ 的搜索结果
最近希望将MeshLab的ply模型转化为Ogre的mesh模型,最初的思路是:(1)在MeshLab中将ply模型转化为Maya支持的obj模型;(2)利用插件,在Maya中将obj模型导出为mesh模型。上述思路是可行的,但导出后发现虽然面片...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者:梦寐mayshine链接:https://zhuanlan.zhihu.com/p/130879159本文转载自知乎,作者已授...
1. SFM Structure from Motion (SfM):从运动中恢复结构,通俗地讲:从序列图像中重建目标三维结构,...VisualSFM; OpenMVG; SfM输出的是稀疏点云以及相机参数,这些信息将用于后续的稠密重建。 2. MVS MultiVie...
目录 ...6.2 增量式的SfM 6.3 受生物学启发的技术 7 Salient feature selection (显著特征选择) 7.1 Detectors (特征检测器) 7.2 Descriptors (特征描述符) 8 图像匹配与数据关联问题 8.1 image match
Method SFM(Structue from Motion) MVS(Multiple-View Stereo) Libriry Bundler OpenMVG ... VisualSFM PMVS2(Patch-based Multi-view Stereo Software...
★基础入门 1.为什么要学习MATLAB 2.MATLAB安装 持续更新....... ★MATLAB基础编程语言熟悉
具体过程为: ① 通过相机标定方法,预先计算相机的内参矩阵; ② 相邻帧特征点匹配,并结合内参矩阵计算本征矩阵; ③ 本征矩阵分解获得相机的外参矩阵[R | T],最终的相机移动距离等于矩阵T的Frobenius范数。...
三棵树干点云,主要通过VisualSFM生成的,可参考操作:VisualSFM的配置与使用 & MeshLab的网格生成与纹理添加:https://blog.csdn.net/weixin_43042683/article/details/127930496?spm=1001.2014.3001.5502
VINS-MONO代码解读3----vins_estimator(鲁棒初始化部分)
自定标(Self-calibration)是SfM里一个非常重要的技术,通过利用图像上的二维信息自动求解出相机的内部参数,而不需要标定物。 一般带自定标的SfM求解流程是先通过两帧或三帧求解来初始化射影空间上的三维结构和...
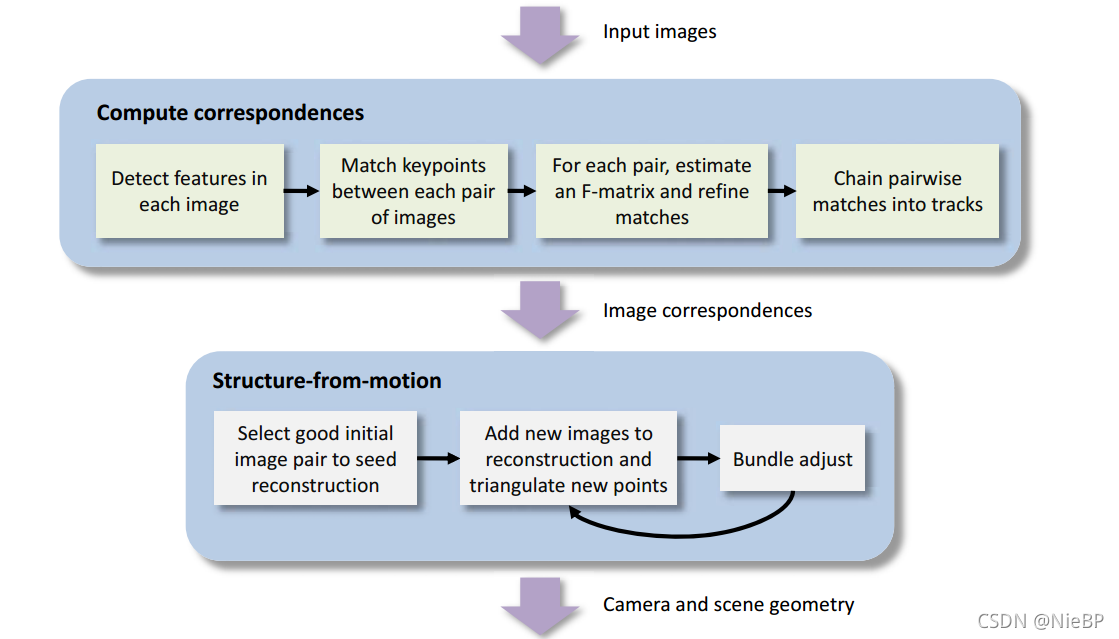
经过一段时间的刻苦钻研,终于摸到SFM的门了,在此把流程稍微捋一下,后续学到新的慢慢丰富吧 1)第一步是特征提取,一般采用SIFT算子,因其具有尺度和旋转不变性 2)第二步是匹配和建立track,图像对两两匹配,一般采用...
使用VisualSFM 三维重建软件需要生成 .ply文件以便用MeshLab打开,只需要下载CMVS&PMVS(WIN32&64)拷贝相应的文件到VisualSFM的根目录,VisualSFM 会自动调用,现在就可以生成.ply文件了。

一SfM介绍 SfM的全称为结构来自Motion,即通过相机的移动来确定目标的空间和几何关系,是三维重建的一种常见方法。它与Kinect这种3D摄像头最大的不同在于,它只需要普通的RGB摄像头即可。 二小孔相机模型 在...
这是3.23组会的汇报内容 看了一些关于三维重建的博客,深入了解了一下点云、体素、网格的区别等。 3D重建的进阶了解---深度图,网格,体素,...用一组图片来做3D reconstruction需要的算法: SFM(Structure fro...
toolkit.zip
kapture-localization:根据kapture格式提供映射和本地化管道
dl-vision-papers:深度学习和三维视觉相关的论文
kapture:kapture是一种文件格式,也是一组用于处理数据集的工具,尤其是用于处理运动数据的视觉定位和结构的工具


VS2017 OPENCV3 contrib(SFM模块) 血泪记录下安装opencv扩展模块踩过的坑!!! 一开始我已经安装了opencv4.5.1,最近需要使用到扩展模块,故上网查询了一些帖子,按照教程操作了好几遍,花了三四天时间始终不能安装...
研究僧上了一年,虽说研究的是CV方面的东西,但基本还是处于小白阶段,忙来忙去不知道忙了些啥就这么荒废了一年(捂脸跑),最近接触了一些三维重建方面的内容,一直也对这方面的东西比较感兴趣,像什么建筑重建啦,...
完成时间:2017年2月27日 博客时间:2017年4月26日 去年,我有幸了解到image-based modeling的相关知识。作为一个大三本科生,虽说自己此前也做过一些相关工作,但是要自己实现Structure f...
1.2 SFM:对多张图片像素做匹配对应,通过上步得到的特征,从而估计相机参数,得到稀疏的3D信息 1.3 CMVS/PMVS:根据上步得到的相机参数,做稠密重建,得到点云 1.4 对上步的点云做后处理,得到网格,去除噪声点等。...
3D视觉工坊学习交流群标题:ELSR: Efficient Line Segment Reconstruction with Planes and Points Guidance作者:武汉大学 遥感信息工程学院 地像天图课题组主要内容:提出了一种高效的线云重建方法,称为ELSR,其...
前言 本资料首发于公众号【3D视觉工坊】,更多干货请关注公众号后台回复关键字获取~ (一)基础操作 Linux 学习网站 Linux中国:https://linux.cn/ 鸟哥的linux私房菜:http://linux.vbird.org/ ......
推荐文章
- python入门(13)异常与文件_except filenotfounderror:-程序员宅基地
- Android面试攻略_详细了解在当今的社会里android工程师应具备什么的技能?并能详细说说自己的见解。-程序员宅基地
- Zendframework 1.6整合Smarty_setting private or protected class member is not a-程序员宅基地
- Qt-装饰者模式_qt装饰模式-程序员宅基地
- 新开普掌上校园服务管理平台service.action RCE漏洞复现 [附POC]-程序员宅基地
- 基于 Milvus 的音频检索系统-程序员宅基地
- 331、基于51单片机智能红外遥控暖风机温度无线蓝牙远程控制系统设计(程序+原理图+配套资料等)_红外感应暖风机自动控制系统设计-程序员宅基地
- Android自定义圆角矩形图片ImageView_android 矩形圆角imageview-程序员宅基地
- 又见回文 字符串-程序员宅基地
- switch的参数可以是什么类型?_switch的参数有哪些-程序员宅基地