”voxelnet“ 的搜索结果

VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection 文章:VoxelNet 这是来自于苹果的一篇文章,一作是目前就职于Waymo的Yin Zhou。通讯作者是苹果的AI research group的首席研究员,Oncel ...
End-to-End Learning for Point Cloud Based 3D Object Detection
VoxelNet-张量流 一个tensorflow实施 。 需求 Python 3.5+ tensorflow 1.4+ NumPy等 用法 看一下config.py的模型配置,通过将数据拆分为测试/训练集。 运行setup.py来构建Cython模块。 $ python setup.py build_...
VoxelNet-TensorFlow:3D目标检测的新里程 项目地址:https://gitcode.com/jeasinema/VoxelNet-tensorflow VoxelNet-TensorFlow 是一个基于TensorFlow实现的3D对象检测框架,源自著名的研究成果VoxelNet,它在处理...
探秘VoxelNet:3D目标检测的新里程碑 项目地址:https://gitcode.com/qianguih/voxelnet VoxelNet是一个在GitHub上开源的深度学习框架,专门用于三维(3D)物体检测。该项目由qianguih开发并维护,它引入了一种创新的...

论文提出了表述了一个新的基于点云的3D检测方法,名为VoxelNet,该方法是一个端到端可训练的深度学习架构,利用了稀疏点云的结构特性,直接在稀疏的3D点上进行操作,并通过高效的并行处理体素网格来获得性能的提升。...
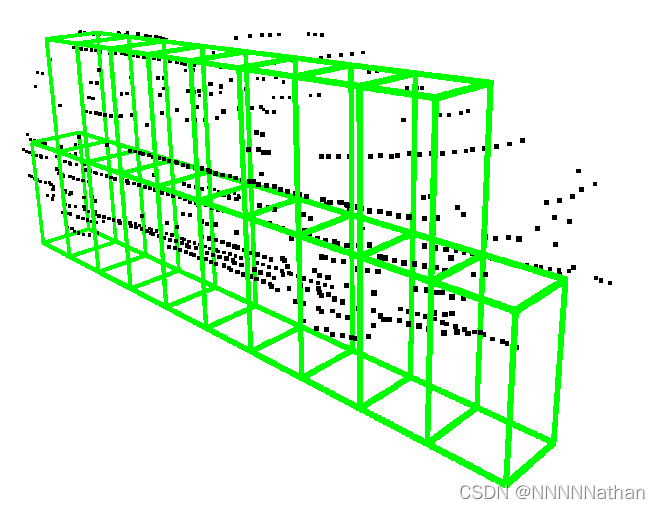
1:贴图Voxelnet网络主要分为两个部分:(1)体素网格划分,(2)3d目标检测网络。
为了处理点云的无序性,PointNet引入了对称函数,也称为集合函数。该操作将无序的点集表示为固定长度的向量。在PointNet中,集合函数的实现形式是基于最大池化(max)。
VoxelNet:点云处理模型详解
标签: 点云
综上所述,VoxelNet模型通过点云数据的体素化和目标检测网络的构建,实现了对点云数据中物体的准确检测和感知。VoxelNet作为一种基于神经网络的模型,被广泛应用于点云数据的目标检测和感知任务。首先,VoxelNet网络...

VoxelNet点云目标识别的翻译版,虽然很多地方还存在翻译上的错误,但是大部分的公式格式已经调好。
VoxelNet学习
标签: 学习
why为了将高度稀疏的LiDAR点云与区域提案网络(RPN)连接起来,大多数现有工作都集中在手工制作的特征表示上,例如鸟瞰投影。在这项工作中,我们消除了对3D点云的手动特征工程的需求,并提出了VoxelNet。


【阅读和学习代码】VoxelNet
标签: 学习
【代码】【阅读和学习代码】VoxelNet。
配置VoxelNet pytorch版本的环境,需要安装低版本的pytorch以适应voxelnet的环境,只需简单三步即可完成环境配置。
CMU_VoxelNet
标签: Python
VoxelNet PyTorch 使用所述的VoxelNet架构,使用激光雷达预测KITTI对象。 这将被扩展以预测茂密的森林点云(如树干)中的对象。 目录 变身 为了从原始点云中完全提取边界框预测,我们必须执行许多转换。 点云转换 ...
在这篇论文中,我们去除了人工特征标注,提出了VoxelNet,统一特征提取,利用single stage,end to end 深度网网络。VoxelNet把点云均匀分割在3D体素,然后利用voxel feature encoding层将它们转化成标准特征...

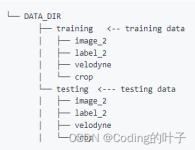
三维点云目标检测 — VoxelNet详解之数据处理 (二) 本节主要介绍VoxelNet的数据处理部分,数据下载及预处理部分请参考:三维点云目标检测 — VoxelNet详解crop.py (一)_Coding的叶子的博客-程序员宅基地。...


3D目标检测简要说明,VoxelNet解读
下图是 MVX-Net VoxelFusion 方法,使用预先训练好的 2D Faster RCNN 计算图像特征图,RPN 和 RCN 并不用于 3D 推理流程。使用标定参数将 3D 点投影到图像,把对应的图像特征添加到 3D 点的后面。...


推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地