
”手眼标定“ 的搜索结果

眼在手移动相机手眼标定,其中包含标定板图像和配套的机器人末端姿态文件



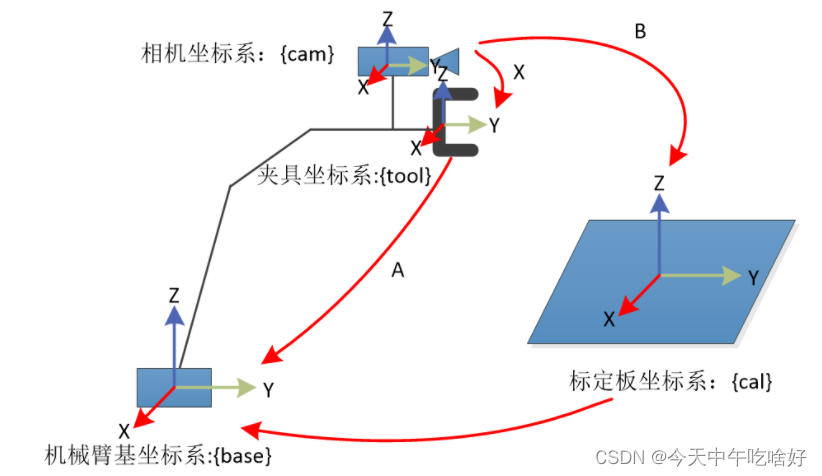
所谓手眼标定是统一视觉系统和机器人的坐标系,从而可以使视觉系统所确定的物体位姿可以转换到机器人坐标系下,由机械臂完成对物体的作业。 最常见的手眼系统包括Eye-to-Hand和Eye-in-Hand两种。在Eye-to-Hand手眼...
丶布布转载注明出处。
本文重点放在了手眼标定的代码以及使用代码的注意事项,虽然网上有很多相关代码,但是个人感觉解释不够清楚或者没有提示需要注意的地方,因此本人希望本篇文章帮助大家少走一些弯路,这也是本人第一次写文章,如果有...
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货...原理与实战相机标定是机器人视觉中非常重要的一步,可以帮助机器人转换识别到的视觉信息,从而完成后续的控制工作,例如视觉抓取等等。笔者做过一些机器...
Halcon SCARA关节机器人手眼标定(眼在手上)例程注解,calibrate_hand_eye_scara_moving_cam.hdev
halcon手眼标定,机器视觉爱好者,用Windows平台对halcon视觉进行标定的步骤,方法总结。
labview联合halcon手眼标定 ,labview调用halcon方法进行九点标定,
九点标定 opencv 方式实现 C++
经典手眼标定算法C++代码,程序是基于OpenCV 2.0以上版本,下载程序后需要配置OpenCV。工程主要包括三个文件,handeye.h为各种手眼标定的实现,quaternion.h为四元数运算文件,handeye_test.cpp为主程序,测试各手眼...
机器人手眼标定过程转换为AX=XB的求解过程,压缩包内包含AX=XB求解的各种方法的代码,还不错。机器人手眼标定过程转换为AX=XB的求解过程,压缩包内包含AX=XB求解的各种方法的代码,还不错。机器人手眼标定过程转换为...
为了实现单目视觉系统的快速、精确的手眼标定, 本文提出了一种新的两步式手眼标定方法, 将手眼标定分为求解旋转关系和平移关系两步. 首先机器人携带标定板进行两次平移运动求解旋转关系, 然后机器人工具坐标系执行...
三维视觉位姿转换原理,多目立体视觉原理,多目相机标定,机器人手眼标定。部分例程基于HALCON讲解。
使用matlab随意建立一个机器人,设定好相机坐标系和标定板坐标系。然后采集不同位姿下,机器人末端在基坐标的位姿T_b_t,标定板坐标系在相机坐标系下的位姿T_c_cal。然后计算相机坐标系相对于机器人基础的位姿。
经典手眼标定算法matlab代码,程序作者为 Christian Wengert 。工具箱包含的主要算法有Tsai-Lenz算法、NAVY算法(Park)、INRIA算法(Horaud)以及对偶四元数手眼定标算法。
一种新的四自由度SCARA机器人手眼标定方法.pdf
最近做科研用到手眼系统标定,在网上搜索方法无果,于是自己亲自编写手眼标定程序,经验证,具有较高精度。
基于ROS的手眼标定程序包源码(c和c++)+项目使用说明.zip 包含基础标定程序包,提供多组机器臂工具坐标和Marker坐标即可完成标定 - 包含JAKA、AUBO机械臂标定程序 - 本程序在`ros kinetic melodic`平台测试通过 >本...
PROBOT Anno手眼标定步骤(easy_handeye-眼在外),
线激光器的手眼标定方法
标签: 手眼标定 线激光
线激光器的手眼标定方法
eye-to-hand手眼标定
标签: 标定工具
手眼标定工具,适用于二维手眼标定,Z轴距离不变的情况,为啥资源分不能为0了
相机标定,手眼标定
手眼标定完整代码,可准确得到转换关系。。。。

推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地