”摄像头标定“ 的搜索结果
对摄像头进行标定,使用opencv,在全国大学生机器人大赛中使用
摄像头标定所需的标定图片,对于没有使用过摄像头标定的可以使用本数据集进行测试。
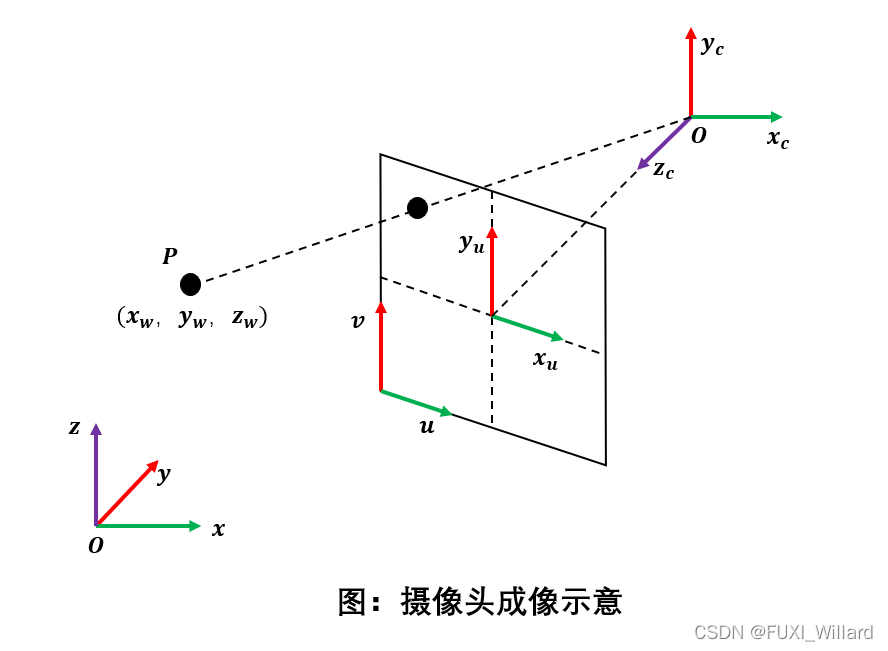
什么是相机标定? 在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些...
Ubuntu系统下ROS机械臂(睿尔曼)与摄像头标定(RealSense)教程(眼在手上) ROS系统搭建 系统:Ubuntu 18.04 ROS:melodic OpenCV 库:OpenCV 3.2.0 Realsense D435: Marker 标记识别:Aruco 功能包 手眼标定:easy...
摄像头标定,双目摄像头立体矫正、获取深度图和点云坐标,估计三维重建后体积实现源码.zip 摄像头标定,双目摄像头立体矫正、获取深度图和点云坐标,估计三维重建后体积实现源码.zip 摄像头标定,双目摄像头立体矫正...
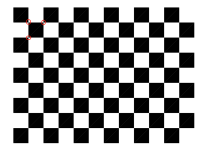
pattern_size = (9, 6) # 棋盘格内角点数量pattern_size = (9, 6) # 棋盘格内角点数量。
OpenCV摄像头标定:包括摄像头内外参数标定、立体视觉标定等功能。OpenCV是一个广泛使用的计算机视觉库,提供了许多功能用于图像处理和计算机视觉任务。其中包括摄像头标定功能,用于获取摄像头的内部和外部参数,...
相机标定,手眼标定

摄像头标定:原理、方法、步骤 (**)
希望以上示例能帮助你了解如何使用OpenCV进行摄像头内外参数标定。请注意根据实际情况和需求进行调整和优化。在上述示例代码中,首先通过函数打开摄像头,并设置摄像头的编号。然后进入循环,采集多个棋盘格图像并...
用于指明标定板的内角点数量,如下图每个红圈的位置就是一个内角点,我所使用的GP290标点板有横向有11个内角点,纵向有8个内角点。当所有进度条都变成绿色后,CALIBRATE按钮由灰色变成深绿色,点击CALIBRATE,点击...

这是用来标定摄像头的程序,里边采集了100组数据值,是为了提高标定的精度。
其中包括摄像头标定功能,用于获取摄像头的内部和外部参数,以及立体视觉标定功能,用于获得立体相机系统的参数。OpenCV提供了一些函数和工具来进行摄像头内外参数标定。其中最常用的是函数,它使用棋盘格图像或其他...
无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的...
摄像头标定技术

基于C++实现双目摄像头标定以及深度匹配+源代码+文档说明 ##代码块 StereoCamera:SGBM双目摄像头深度匹配 CameraCalibration:双目摄像头标定程序 ##使用说明: 1.为项目添加相应依赖库 2.修改LBF训练模型的读取...
Ubuntu20.04在ROS中使用摄像头标定
摄像头标定,双目摄像头立体矫正、获取深度图和点云坐标,估计三维重建后体积实现源码.zip 摄像头标定,双目摄像头立体矫正、获取深度图和点云坐标,估计三维重建后体积实现源码.zip 摄像头标定,双目摄像头立体矫正...
摄像头标定棋盘格10*7
标签: 棋盘格
.bmp一步到位,不用再码代码跑出个图片
摄像头标定的目的:车载摄像头标定是指调整和校准车辆上安装的摄像头,以确保其能够准确地捕捉和传输图像信息。标定的目的是消除图像畸变、校正摄像头位置和方向,并确保摄像头采集的图像与实际情况相符
opencv摄像头标定
标签: opencv 标定
opencv的摄像头标定程序,棋盘格内角点为13*12个,方块边长为30mm
摄像头标定原理 基本概念 视角 : 视野边界的夹角,即成像范围 图像噪音 : 指的是图像中的杂点干挠。表现为图像中有固定的彩色杂点。 彩色深度 : 反映对色彩的识别能力和成像的色彩表现能力,实际就是A/D转换器...
适合单目摄像头标定,黑白棋盘格标定板图
摄像头标定opencv源码摄像头标定opencv源码摄像头标定opencv源码
利用开放的源代码库,编写以VC实现的摄像头标定程序,能够精确实现内参与外参的标定。
推荐文章
- 认识数据湖加速器(Data Lake Accelerator Goose FileSystem,GooseFS)-程序员宅基地
- 人工智能:语音合成技术介绍_语音合成需要什么知识和技能-程序员宅基地
- 高斯混合模型是什么?什么是软聚类?高斯混合模型还能做什么?_bayesiangaussianmixture-程序员宅基地
- 2022最全最细软件测试工程师的职业规划和职业发展【入门篇】_测试工程师规划-程序员宅基地
- 微内核 性能 ipc linux,微内核(microkernel)有关-程序员宅基地
- 【Android 系统】--- Android代号、标记、细分版本号(超详细 持续更新中)_android 版本号-程序员宅基地
- Python进阶----在线翻译器(Python3的百度翻译爬虫)_百度翻译 requests-程序员宅基地
- EVO-CNN-LSTM-multihead-Attention能量谷算法优化模型结合多头注意力机制多维时序预测-程序员宅基地
- Objective-C 中的id到底是什么-程序员宅基地
- 好记性不如烂笔头---Archlinux优化简介-程序员宅基地