
”摄像头标定与数据处理“ 的搜索结果
摄像头标定原理 基本概念 视角 : 视野边界的夹角,即成像范围 图像噪音 : 指的是图像中的杂点干挠。表现为图像中有固定的彩色杂点。 彩色深度 : 反映对色彩的识别能力和成像的色彩表现能力,实际就是A/D转换器...
基于MATLAB的棉株识别系统摄像头标定研究.pdf
摄像头标定:原理、方法、步骤 (**)

1. Colibri_GD32F207这个板子的MCU是带有camera的接口的,但是没有引出来,使用使用了FIFO的OV7670摄像头,数据口使用GPIO。OV7670是30W的摄像头最大是支持VGA 640*480的像素,但是应为液晶的分辨率只有320*240,...


怎么获取双目图片,请参考我的zynq SD卡写入摄像头图像(图片格式); 怎么自己制作高清标定板,这得等我回到家再发出来; matlab是个强大的工具,集合很多强大的功能,使得很多事情变得简单。双目标定是个极其...

A4摄像头标定棋盘格是指使用A4纸大小的棋盘格图案来对摄像头进行标定。在这个过程中,首先需要打印...总之,A4摄像头标定棋盘格是一个简单而有效的摄像头标定方法,可以为图像处理和分析领域提供准确的参数和数据支持。
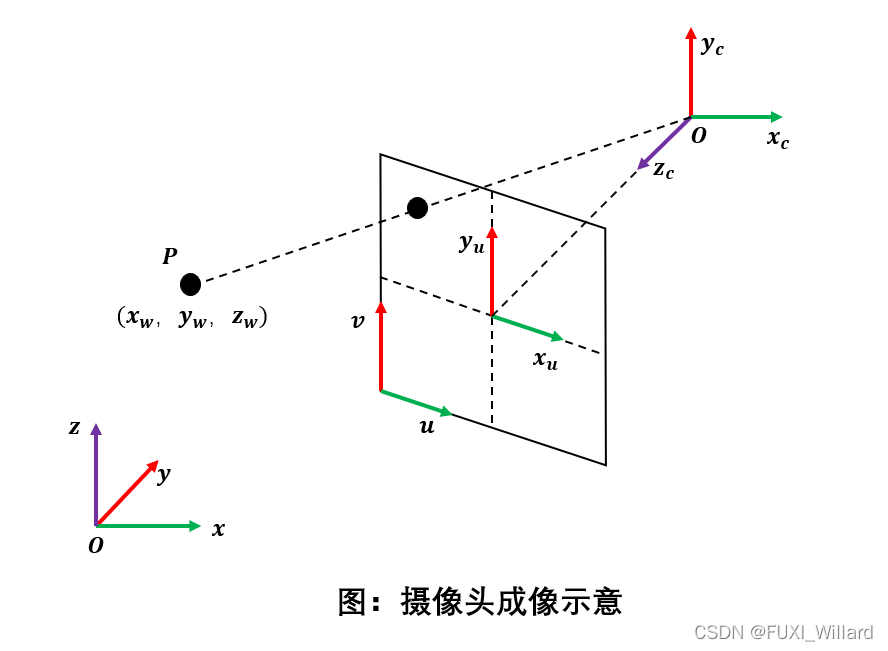
摄像机的标定方法1引言机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,由此重建和识别物体。摄像机获取图像时,空间物体表面的点投影在投影平面上的位置是确定的,但是由于无法进行...
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它提供了一系列用于图像处理和计算机视觉的函数和工具。OpenCV最初由Intel开发,现被广泛使用于学术界和工业界,支持多种编程语言包括C++...
http://wiki.opencv.org.cn/index.php/摄像头标定 标定原理介绍 摄像机小孔模型 Cv照相机定标和三维重建#针孔相机模型和变形 [编辑] 标定程序1(opencv自带的示例程序) [编辑] 简介 读者可以直接使用...
## 1.1 图像配准和摄像头标定的概念与应用背景 图像配准是指将多幅图像进行平移、旋转、缩放等变换,使它们在相同的坐标系下对齐的过程。图像配准技术在计算机视觉、医学影像处理、遥感等领域有广泛的应用。例如,...
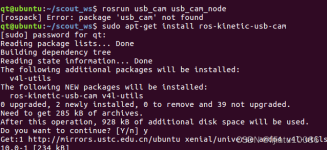
ROS高效进阶第四章 -- 机器视觉处理之图像格式,usb_cam,摄像头标定,opencv和cv_bridge引入
参考:利用matlab工具箱进行双目标定... 3 准备标定板Download Page,采集数据。 一般的,标定板越大越好。将标定板摆在相机可视的范围内,每拍一张照片,标定板换一个位置和朝向。采集棋...
摄像头标定在计算机视觉中的重要性
标签: 开发技术
摄像头标定在计算机视觉和机器视觉中扮演着至关重要的角色,它决定了摄像头成像的精确性与准确性,直接影响到后续计算机视觉算法的实际效果。 在本章中,我们将深入探讨摄像头标定的概念和作用,帮助读者全面了解...
在计算机视觉中,通常都会碰到自己制作数据集的情况,有些时候需要自己写爬虫程序从网站上下载不同标签的...对于不同型号的摄像头,其内参一般是不一样的,下面给出一种简便的方法,对单目摄像头进行标定。LZ使用的是
UBUNTU20.04 下 ROS 摄像头标定 很久没用ROS 了, 想先查一下之前安装的ROS版本, 运行roscore是 出现下面error: Resource not found: roslaunch The traceback for the exception was written to the log file ...
基于ROS环境的相机标定教程
Ubuntu20.04在ROS中使用摄像头标定
本篇博客主要介绍cv2模块中的摄像头标定。 摄像头会发生径向畸变和切向畸变。 摄像头的内部参数和外部参数。内部参数是摄像头特异的,它包括的信息有x方向和y方向的焦距(fx, fy),光圈中心(cx, cy),相机的内部...

生成的物体图像常常会发生一定的畸变,例如在鱼眼摄像头,畸变是非常大的,如果直接将采集到的图像拿来进行图像处理的话,会产生很大的问题,为了避免数据源造成的误差,需要针对摄像头的参数进行标定。 安装标定...
我们已经了解了相机如何通过在 2D 传感器平面上投射光线来拍摄 3D 场景,生成的图像准确地表示了在...为了恢复场景的 3D 结构和摄像机的 3D 姿态,我们需要对相机参数进行校准,在本节中,我们将介绍如何执行相机标定。
推荐文章
- python爬虫提取人名_Python2爬取学生名单-程序员宅基地
- C语言三剑客:C陷阱与缺陷、C和指针、C专家编程_c和指针c专家编程c陷阱与缺陷-程序员宅基地
- ubuntu查看网络端口情况-程序员宅基地
- Yocto新增一个hello程序_yocto hello-程序员宅基地
- 目标:丢失所以控制文件,数据库文件,redo文件。只有rman全备的和所有归档的恢复_ora-19697-程序员宅基地
- vue在mounted中获取元素宽度不准确的问题_vue组件深层嵌套mounted获取元素尺寸不准确-程序员宅基地
- CSS3之线条特效(鼠标悬停线条从中间变长)_css横线从短到长-程序员宅基地
- linux系统can扩展,linux下can调试工具canutils安装过程记录-程序员宅基地
- vba抓取html文件数据,VBA抓取PDF数据-程序员宅基地
- 下载SQL Server 2008 R2 Express(数据库大小限制提高到10G)-程序员宅基地