
”普通镜头标定“ 的搜索结果
2006年牛人发表的PAMI文章的鱼眼镜头、全方位镜头、以及普通镜头的标定代码。用matlab实现
径向畸变产生的原因:相机的光学镜头厚度不均匀,离镜头越远场景的光线就越弯曲从而产生径向畸变。 切向畸变产生的原因:镜头与图像传感器不完全平行造成的。 相机参数有哪些? 相机内参:主要包括相机矩阵(包括...

OpenCV相机标定包括普通相机标定和鱼眼相机标定,其中普通相机标定参考的是张正友标定法,而鱼眼相机的标定是基于等距投影模型进行标定的. 普通相机标定 张正友标定法 (1) 针孔模型内外参标定 针孔相机投影模型方程...

总结!结构光重建之沙姆镜头用途
标签: 数码相机
添加微信:dddvisiona,备注:结构光,拉你入群。文末附行业细分群。01 沙姆用途在结构光技术中,...让我们来看,如图1所示:图1 沙姆定律沙姆定律:当被摄主体平面(Subject Plane)、镜头平面(Lens Plane)、成...
2006年牛人发表的PAMI文章的鱼眼镜头、全方位镜头、以及普通镜头的标定代码。用matlab实现 相关下载链接://download.csdn.net/download/u012758265/7607509?utm_source=bbsseo
利用OpenCV3进行鱼眼镜头标定 OpenCV3.0 alpha在8月21日发布,其中增加了鱼眼镜头模型,提供了标定、去畸变等一系列api,其实现方法参考了{Camera Calibration Toolbox for Matlab}。本文简单介绍了OpenCV 中...
摘自:https://blog.csdn.net/abc039510/article/details/88421490?utm_medium=distribute.pc_relevant_t0.none-task-blog-OPENSEARCH-1.control&...广角镜头的标定、畸变校正和基于ROS的实时视频输出 whu-hk 201


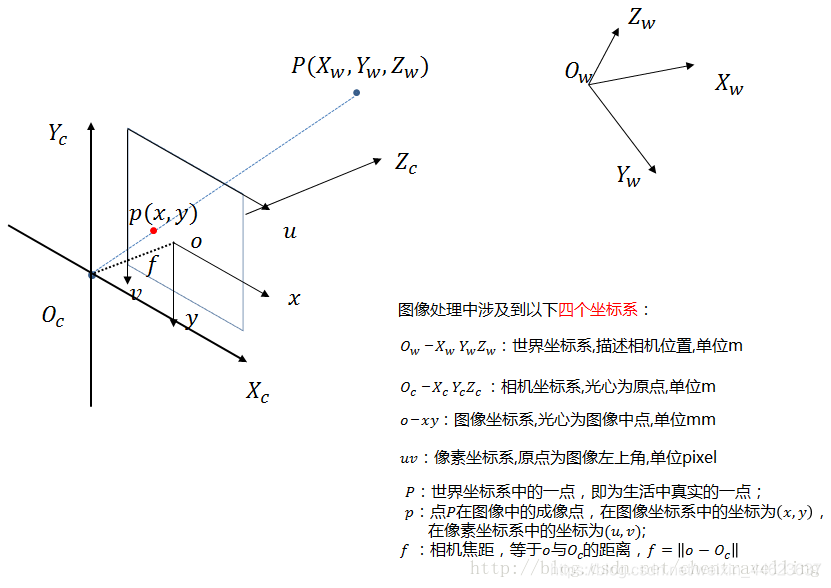
摄像头标定原理 基本概念 视角 : 视野边界的夹角,即成像范围 图像噪音 : 指的是图像中的杂点干挠。表现为图像中有固定的彩色杂点。 彩色深度 : 反映对色彩的识别能力和成像的色彩表现能力,实际就是A/D转换器...
R是3×3的正交单位矩阵(即旋转矩阵),t为平移向量,R、t与摄像机无关,所以称这两个参数为摄像机的外参数(extrinsicparameter),可以理解为两个坐标原点之间的距离,因其受x,y,z三个方向上的分量共同控制,所以其...
对大多数普通相机,他们的数学模型就是小孔成像模型。 而对广角和鱼眼镜头他们的模型可能就要复杂一些,OpenCV等采用多项式的形式去近似入射角和成像的关系。 *opencv的鱼眼相机模型,采用直接近似的形式,误差比较...
我们需要做的是,移动标定板的位姿,包括上下左右,远近,以及俯仰(总结来说,就是在能够检测出角点的情况下,使标定板尽可能出现在相机视场中的每个位置)使得标定界面中的四个指标X,Y,Size,Screw下边的线尽...

相机标定是准确确定相机和镜头模型参数的过程。对于针孔模型,这相当于确定合适的相机模型的参数。至少是焦距 fff,可能还有中心点坐标 (cx,cyc_x, c_ycx,cy) 和镜头畸变参数 k\boldsymbol{k}k。 在最常见的离线...
//liyongbo 2015.05.06 changchun //#include "stdafx.h" #include #include #include #include using namespace cv; using namespace std; #include "cv.h" #include "highgui.h" #include ...#in

matlab标定相机内参
标签: c++

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达编辑丨机器视觉课堂基本镜头类型近心:入射光瞳在镜头内部远心:入射光瞳在无限远处环外侧:入射光瞳在镜头前方放大倍率稳定性在测量应用中,...

推荐文章
- Ubuntu/linux下下载工具_ubuntu下载软件助手 linux版本-程序员宅基地
- HTML、JSP前端页面国际化(i18n)_html全局国际化-程序员宅基地
- Python高级-08-正则表达式_写出能够匹配只有下划线和数字还有字母组成(且第一个字符必须为字母)的163邮箱(@1-程序员宅基地
- 寻仙手游维护公告服务器停服更新,寻仙手游2月1日停服更新公告 2月1日更新了什么...-程序员宅基地
- 用python自动预约图书馆座位_微信图书馆座位秒抢脚本-程序员宅基地
- Android真机或模拟器激活Xposed框架的方法_de.robv.android.xposed.installer-程序员宅基地
- 操作系统为什么要分用户态和内核态_用户态和内核态都需要cpu参与,为什么要区分-程序员宅基地
- 01—JVM与Java体系结构(简单介绍)_01_jvm与java体系结构.pptx-程序员宅基地
- 国有建筑企业数字化转型整体解决方案_建筑企业数字化转型行动方案-程序员宅基地
- 性能测试的软件------loadrunner_loadrunner有有三个图标,-程序员宅基地