对轮廓点进行有序排序,依据旋转角度策略进行排序
”点云排序“ 的搜索结果
然后,我们创建了一个包含点云数据的 numpy 数组,并使用 Open3D 创建了一个点云对象。接下来,我们定义了一个自定义的比较函数,用于指定按照哪个坐标值进行排序。...函数对点云对象进行排序,并输出排序后的结果。
按照X,Y,Z的优先顺序对点云数据排序,这是源代码,自己编译一下就可以使用了,如果使用过程中有问题的话,可以在下面留言,我看到了会回答大家的。
PCL :实现点云按坐标值大小进行排序(附完整源码)
无序点云排序 在实际开发过程中,往往会遇到对一群点云数据先进行某种方式排序,然后再作其他的算法处理,达到工程目的。例如,本文需要处理以下点云数据,在进行后续算法之前需要先对点云进行排序,三维点云数据...


然后,根据排序后的索引重新组织了点云数据,并打印出排序后的点云的坐标值。总结起来,本文介绍了如何使用PCL库对点云按照坐标值大小进行排序,并提供了相应的源代码示例。通过以上代码,我们可以实现对点云按照...
点云排序是将点云数据中的点按照特定的规则进行重新排序的操作。 点云排序可以通过以下步骤实现: 首先,需要定义排序规则。可以按照点的坐标、颜色、密度等属性进行排序。例如,可以选择按照点的x、y、z坐标进行...
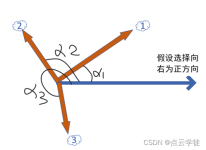
基于角度的边缘点排序主要是基于每一个边缘点与点云中心位姿构成的向量与参考方向之间的角度大小进行排序。
主题:对三维点云的排序 排序规则:优先级,X轴 > Y轴 > Z轴 结果 代码 #include<iostream> #include<algorithm> using namespace std; struct Point { double x, y, z; Point() = default...
在点云排序中,我们希望找到一条路径,使得路径上相邻点的距离最小。为了实现这个目标,我们可以先计算点与点之间的距离,并构建一个完全图。最后,根据最小生成树的连接顺序对点进行排序。在处理点云数据时,点的...


针对没有显式拓扑关系的质点云,提出了一种并行快速排序算法。 引入了莫顿阶并将其用于合并一维数据。 生成不规则模型的质量点云,对应的地址代码称为Morton码... 该算法比在整个点云上使用的那些复杂排序方法更简单。
PCL学习目录
点云按坐标大小进行排序



点云按坐标值的大小进行排序。
几种常见的排序算法实现(C++)
标签: 排序算法
记录了冒泡排序,选择排序,直接插入排序,希尔排序,快速排序,堆排序和归并排序的实现。 #include<iostream> #include<vector> using namespace std; void bubbleSort(vector<int> &s) { ...
PCL区域生长的代码实现
标签: c++
(1)首先计算出来各点的曲率值,将曲率值按照从小到大的顺序进行排序。 (2)设置一空的种子点序列和一个空的聚类数组。 (3)选取曲率最小的点放入上述种子点序列中。 (4)从序列中拿出来一个种子点搜索其邻域。 ...
总结起来,PCL库提供了强大的功能来处理点云数据,包括对平面点云中的边界点进行排序。通过合理运用这些功能,我们可以更好地理解和利用点云数据在计算机视觉和三维重建领域中的应用。通过这种方法,我们可以有效地...
PCL:实现平面点云边界点按顺时针排序(附完整源码)
提出一种基于最小生成树的切片数据点排序算法,该算法建立散乱点云空间索引结构,基于该结构快速获取切片邻域数据,依据邻域数据与切片的位置关系将其划分为正负2个区域,通过正负邻域配对点连线与切片求交获取切片数据...
在点云处理中,经常需要对点云数据进行排序。通过以上方法,我们可以很方便地使用 PCL 对点云数据进行基于坐标值的排序。该函数接受三个参数:待排序的点云对象、点云中每个点的索引向量以及排序的字段。需要注意的...
在点云处理中,经常需要对平面点云的边界点进行排序,以便进一步分析和处理。在上述代码中,我们使用SACSegmentation类对输入的点云数据进行平面分割,将平面模型的系数存储在coefficients中,并将属于平面的点的...
推荐文章
- python入门(13)异常与文件_except filenotfounderror:-程序员宅基地
- Android面试攻略_详细了解在当今的社会里android工程师应具备什么的技能?并能详细说说自己的见解。-程序员宅基地
- Zendframework 1.6整合Smarty_setting private or protected class member is not a-程序员宅基地
- Qt-装饰者模式_qt装饰模式-程序员宅基地
- 新开普掌上校园服务管理平台service.action RCE漏洞复现 [附POC]-程序员宅基地
- 基于 Milvus 的音频检索系统-程序员宅基地
- 331、基于51单片机智能红外遥控暖风机温度无线蓝牙远程控制系统设计(程序+原理图+配套资料等)_红外感应暖风机自动控制系统设计-程序员宅基地
- Android自定义圆角矩形图片ImageView_android 矩形圆角imageview-程序员宅基地
- 又见回文 字符串-程序员宅基地
- switch的参数可以是什么类型?_switch的参数有哪些-程序员宅基地