
”点云目标检测“ 的搜索结果
点云目标检测可视化 文件
标签: 目标检测
点云目标检测可视化文件
【基于Ubuntu下pointnet++激光点云目标检测】保姆级教程 | 环境配置 | 数据集下载 | 修改配置 | 训练以及测试 | 全过程图文by.Akaxi
在kitti数据集上目前排名前三,文章通俗易懂(也可能是我没看懂)(这部分后面再补吧)
以基于深度学习的3D目标检测算法为核心,自动驾驶系统中的目标感知模块扮演着非常重要的角色。目标感知模块通过传感器接收到3D世界中的实时信息,以此对潜在关注的目标进行尺寸、位置的预测。感知结果的准确程度,将...
3D点云目标检测的两个发展方向综述,详细讲述 模型原理与发展方向,以及模型准确度与处理数据量



第二个是目标检测过程。 两个问题:三维卷积复杂度高,voxedl数量大会引入错误。 PointNet++ 尝试通过聚类建立点与点的拓扑,在聚类中心学习特征。问题:点云中很难根据一个点确定物体的中心。 鸟瞰图 把不同高度...
初步使用mmdetection3d进行点云目标检测

3D目标检测数据增强


仅供大家参考

本文是根据Deep Learning for 3D Point Clouds A Survey[1]和A Survey on 3D Object Detection Methods for Autonomous Driving Applications[2]两篇综述论文进行3D点云目标检测研究的讨论和总结。 数据类型 目前...
综上所述,点云目标检测的整体流程包括点云数据的预处理、特征提取、目标分类、目标检测以及结果可视化与输出。通过以上流程和相应的源代码示例,我们能够实现基于点云数据的目标检测任务。而点云目标检测则是在三维...
来源:汇总|3D点云目标检测算法 前言 前面总结了几种基于激光雷达点云数据的3D目标检测算法,还有一些算法不再单独列出,这里做个简单总结来分享下! 基于激光雷达点云的3D目标检测算法 1、End-to-End Multi-View ...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达转载于 :计算机视觉之路,作者:山涧一壶酒/导读/自动驾驶中的激光雷达点云如何做特征表达,将基于Lidar的目标检测方法分成了4...
在本文中,我们将探讨点云目标检测中常用的数据增强技术,并通过可视化展示其效果,分享一些使用经验。总之,数据增强技术在点云目标检测中扮演着重要角色,通过合理选择和应用增强方法,可以提升模型的性能和鲁棒性...

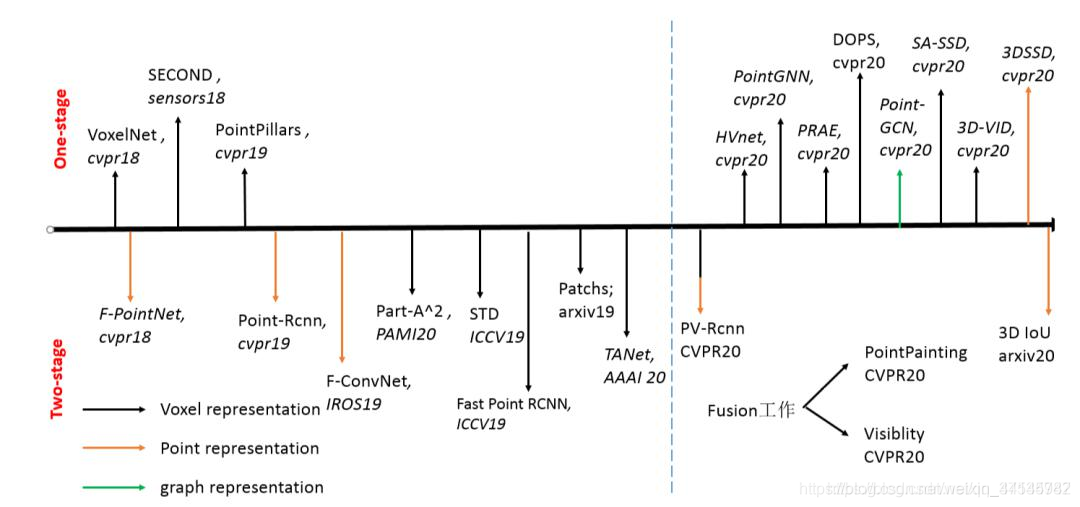
和二维图像目标检测一样,3D点云目标检测除了按照输入模态划分为基于点云、基于单目、基于双目或者是多模态融合的方法。也可以按照对proposal的提出和优化分为one-stage、two-stage甚至three-stage的方法。 ...
PointRCNN作为一种先进的点云目标检测与三维物体识别方法,充分利用了点云数据的特点,提供了高效和准确的目标检测结果。未来,我们有望通过进一步的研究和改进,进一步完善和推动点云目标检测技术的发展,以满足更...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达文章导读 本文是一篇将注意力机制应用在点云目标检测中的文章《TANet: Robust 3D Object Detection fro...
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地