”相机标定“ 的搜索结果
单目相机标定,棋盘格畸变纠正,附带代码注释,输出内参,外参,畸变函数
参考张正友棋盘格相机标定方法,研究基于机器视觉的相机标定方法,用以解决3D定位及三维重建等问题
相机标定的原理及实现
标签: 相机标定

张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机...
相机标定实验报告
立体视觉,相机标定参数学习介绍,辅助3D重建、目标检测任务。

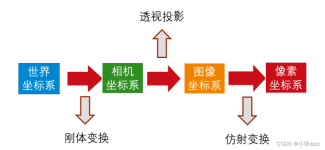
相机标定PPT ,内容包含标定目的,四种坐标的转换、张正友标定法、单应性矩阵的求解、相机内参外参的求解,畸变矫正等。适用于学习单目双目视觉的研究者了解相机测距和三维建模等的原理。
相机标定相机标定的目的 获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。 相机标定的输入 标定图像上...
基于opencv&c++的相机标定,建立世界坐标,寻找12个对应的图象坐标,计算出相机的内外参数。然后给出一个世界坐标,点击图片,自动给出对应的图象坐标。
要计算拍摄到的图像中每个像素点所代表的真实距离,你需要考虑相机的焦距、传感器大小、分辨率以及目标物体与相机的距离。对于一个简化的情况,我们可以使用针孔相机模型来进行计算。首先,你需要知道相机传感器的...


基于Matlab开发的针对相机的单目标定和多目标定源码,实现相机内参与外参的自动生成
【程序老媛出品,必属精品,亲测校正,质量...源码说明: 基于matlab实现相机标定程序源码 matlab相机标定,直接线性法,透视投影矩阵法 包含完整源码和注释 非常适合借鉴学习 适合人群:新手及有一定经验的开发人员
这个视频是建议有一定基础的去看,详细介绍了整个标定的过程。这个文章基础一点,可以先看这里用sick的visionary 相机的sdk做分析cxcy 就是图像坐标系下...3. 2D相机的手眼标定 看了上面的案例 ,我们发现相机的sdk只做
相机标定及C++实现
标签: 计算机视觉
相机标定(Camera Calibration)是计算机视觉中的一项重要技术,其目的就是确定相机的内参和外参。它可以修正镜头畸变,如桶形畸变或枕形畸变,以获得更接近真实世界的图像;在机器人视觉系统中,准确的相机标定可以...

针对现有参数化Scheimpflug相机标定方法中初值确定过程复杂的问题,提出一种非参数化的基于广义成像模型的Scheimpflug相机标定方法。该模型将Scheimpflug相机看作一组像素和其对应的虚拟空间光线的集合,标定直接...
基于opencv的双目相机标定程序,用的张正友的方法,非常好用的程序,使用前需要先获得单目相机标定的参数,然后带入此双目程序,再根据拍摄的两相机公共视场下的棋盘格的图像,就可以解算出两相机之间的位置关系,...
4. 修改刚拷贝出来的文件VID5.xml 注意是相对路径 而且本人图片是放在phone_img目录下,根据你自己照片位置修改。按照下面的选项设置参数导数PDF打印。openCv版本:4.4.0。
单目相机标定手把手操作
标签: 计算机视觉
本文仅是为了帮助获取单目相机内参的实验
在基于圆点阵二维平面靶标的相机标定方法中,直接在拍摄的标靶图像中提取的椭圆中心并非真实的圆心投影像点,该圆心成像投影偏差必然会降低相机参数标定精度。基于此,提出将标靶图像逆向投影至空间虚拟矩阵以获得真实...
改进过的张正友标定法,可以用于使用圆形标记点标定板的相机标定。

在这篇博客中,博主将介绍采用同心双圆环靶标下的相机标定与代码实践,我们不讲解传统的棋盘格圆点靶标(都烂大街了!同心双圆环靶标。它能有效避免棋盘格和圆点靶标的原理误差。完成本篇博客的学习内容后,你将收获...
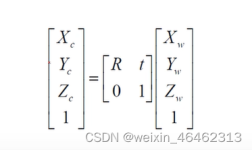
像素坐标系的单位为pixel,其中为成像平面中心点在像素坐标系下的坐标,和分别表示在像素坐标系下, x 轴和 y 轴方向每个像素的物理尺寸...内参矩阵取决于相机内部参数,外参矩阵取决于相机坐标系和世界坐标系的位置。
相机标定棋盘格图片,jpg&png格式,有OpenCV和MATLAB版本,棋盘形状有7*10方形和16*16正方形两种。打印后可以直接使用。
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地