
”移动机器人“ 的搜索结果
浙大机器人课的讲义浙大机器人课的讲义浙大机器人课的讲义浙大机器人课的讲义浙大机器人课的讲义
包含n个控制点(含起点和终点)B样条曲线的移动机器人轨迹规划程序,所生成的轨迹必须严格经过起点、第三个控制点和终点(可调)
移动机器人是机器人的一个重要的分支,在无人驾驶、太空探索、海洋勘探和医疗服务等领域得到了广泛的使用。其中轮式移动机器人是一个重要的分支,轮式移动机器人又可以根据驱动方式的不同分为阿克曼结构,两轮差速...
轮式自主移动机器人编程实战.docx
本文提出了一种全向轮移动机器人的混合共享控制方法。提出了一种基于肌电图(EMG)和人工势场的混合共享控制方法,根据排斥力和吸引力避开障碍物,并基于移动平台的力反馈增强人类对远程环境的感知。与传统同类相比...
RRT(Rapidly-exploring Random Tree)算法是一种基于随机采样的树形路径规划算法,特别适用于机器人、自动驾驶车辆和其他自主系统的运动规划问题。该算法的核心思想是在机器人的可达空间中随机生成采样点,并通过从...
本文对高飞老师的移动机器人运动规划课程第一章做了学习记录,方便日后复习回顾
在雷达的头部分别有一个激光发射头和线性的CCD接收头。小鱼特意拆了个雷达,放张图给大家看看右边黑色的是发射头,左边是CCD接收头,发射头发射出的光属于波长大约在1000nm左右的红外光,肉眼是不可见的。...
自定义移动机器人模型Gazebo仿真
标签: 学习
ROS学习(九)自定义移动机器人模型Gazebo仿真,对应源码。博客地址:https://blog.csdn.net/u011832219/article/details/115035134
T_SSITS 503-2022 工业应用移动机器人 复合机器人技术规范.pdf
探索未来移动机器人的导航利器:ROS-SLAM 项目地址:https://gitcode.com/borninfreedom/ros-slam ROS-SLAM 是一个基于开源机器人操作系统(ROS)的实时三维环境建图与定位(Simultaneous Localization and Mapping,...
matlab自主移动机器人控制.rar

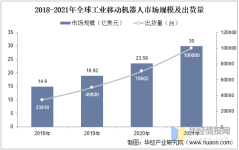
1.移动机器人发展现状
标签: 人工智能
知识梳理与读后感
移动机器人SLAM技术.doc
标签: 文档资料
移动机器人SLAM技术 作者:孙博雅 来源:《电子技术与软件工程》2018年第02期 摘 要 在太空探索宇航领域、工业自动化领域、以及军事服务等领域移动机器人系统技术有着 广泛的发展前景。SLAM技术的是simultaneous ...
在人们的日常生活中,机器人已经从以往的工业应用,拓展到商业应用,在许多的餐厅中,已经可以看到机器人在帮忙送餐,在许多商场内,机器人也开始担任着迎宾、导览的工作,这代表着相关技术的逐步成熟,以及成本的...
探索未来移动机器人:RM2010 AGV infantry - 开源智能无人平台 项目地址:https://gitcode.com/scutrobotlab/RM2010_AGVinfantry RM2010 AGV infantry 是一个由华中科技大学机器人实验室开发并开源的智能无人平台项目...
首先, 基于拉格朗日方程建立移动机器人模型; 然后, 根据侧向误差和角度误差的关系设计引导角, 将该引导角作为虚拟输入, 结合Backstepping 方法设计基于移动机器人运动学模型的轨迹跟踪控制律, 并给出参数选取条件; ...
对差速移动机器人轨迹跟踪问题,提出一种使用PID环节对航向角和距离进行控制算法。首先对实际GPS传感器的经纬度进行转换,其次建立差速移动机器人运动学模型,最后利用控制算法对离散的数据点进行跟踪并与PurePursuit...
移动机器人运动模型推导
【验】粒子群优化算法,通过栅格法实现移动机器人路径规划.zip
移动机器人路径规划是机器人学的一个最基本也是最复杂的问题,它被描述成: 给定一个移动机器人所处的环境(环境可以通过移动机器人视觉系统或者别的途径获得),一个起始点和一个期望的终止点,移动机器人路径...
移动机器人原理英文原版.zip
标签: 移动机器人
讲述移动机器人原理与设计,英文原版,字体清晰,非扫描版
移动机器人运动规划项目:智能化与实用性并存 项目地址:https://gitcode.com/Amos-Chen98/mobile_robots_motion_planning 项目简介 在快速发展的自动化领域中,移动机器人的运动规划是至关重要的一个环节。本项目,...
基于matlab基于粒子群算法的移动机器人路径规划,关于粒子群算法求解路径规划的问题_zip.rar
轮式移动机器人动力学是从有关该主题的标准论文中研究的,并进行非线性反馈线性化以将运动方程简化为轮式机器人位置误差的二阶动力学方程。 AVI 文件录制也可用于以后轻松查看。 只需取消注释 PLOTBOT_WMR 文件中标...
移动机器人定位导航性能评估规范(征求意见稿2020).pdf
自主移动机器人导论:3 Mobile Robot Introduction - Kinematics.pdf
推荐文章
- NSFuzz:TowardsEfficient and State-Aware Network Service Fuzzing-程序员宅基地
- 刘睿民畅谈大数据:政府应紧急设立首席数据官-程序员宅基地
- nginx 编译安装依赖包_nginx编译怎么添加新的依赖库-程序员宅基地
- Python+OpenCV+Tesseract实现OCR字符识别_python + opencv + tesseract-程序员宅基地
- 微型计算机主板上的主要部件,微型计算机主板上安装的主要部件-程序员宅基地
- 推荐一款可匹敌国际大厂的国产企业级低无代码平台_国产私有化 无代码-程序员宅基地
- UE4 蓝图 实现 数组的边遍历边删除_ue4 数组删不掉-程序员宅基地
- python爬虫之bs4解析和xpath解析_from bs4 import beautifulsoup xpath-程序员宅基地
- MySQL配置环境变量-程序员宅基地
- VGG16进行微调,训练mnist数据集_vgg16 tensorflow 2 mnist-程序员宅基地