
”立体校正“ 的搜索结果

通过matlab标定和立体校正,加载左右图片,保存标定参数,然后对左右图片进行立体校正,具体效果我博客有介绍。
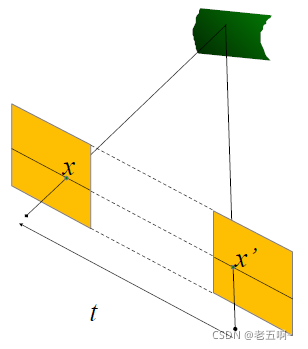
点击上方“计算机视觉工坊”,选择“星标”干货第一时间送达来源:公众号@计算摄影学一. 直观认识立体校正在文章68. 三维重建3-两视图几何中,我们看到通过三角测量,可以确定一个像点在三维空...
终于弄清楚畸变矫正和立体校正的过程了
在进行极线搜索时,为了方便,将极点通过射影变换转至无穷远点,则图上的极线都变成了平行线,便于搜索
基于 Opencv 的透视和鱼眼(全向)相机的立体校正和立体匹配。 本项目的特点是有两种整流方式。 第一种是传统的透视校正,即校正后的图像是透视的,因此可以在一行中应用立体匹配。 然而,由于全向相机的视场(FOV)...
我们知道cvStereoRectify()函数只是计算了校正需要的参数,并没有完成图像上实际的校正。 下面介绍两个函数: cvInitUndistortRectifyMap()函数来计算左右视图的校正查找映射表mapx,mapy。 cvRemap()函数利用查找...

基于opencv+matlab+C++开发的双目视觉测量+相机标定+立体校正+三维坐标重载+计算工件变形量,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用~ 基于opencv+matlab+...
【立体校正】C/C++复现前言立体校正原理简述实际效果问题求助 前言 项目需要,基于C/C++复现了双目立体校正功能,仅支持双线性插值方式。 立体校正原理简述 功能简述: 立体校正即把左右摄像头采集的图像中同一物点...
通过图像预处理提取工件测量点,利用Matlab工具箱标定相机,opencv获取标定结果并结合立体校正,立体匹配算法重建物体三维坐标以求得工件变形量。.zip数学建模大赛赛题、解决方案资料,供备赛者学习参考!数学建模...


【项目资源】: 包含前端、后端、移动开发、操作系统、人工智能、物联网、信息化管理、数据库、硬件开发、大数据、课程资源、音视频、网站开发等各种技术项目的源码。 ... 【项目质量】: 所有源码都经过严格测试,...
在HLS平台使用Xilinx官方提供的视频处理库实现双目相机立体校正。

目的:立体校正就是,把实际中非共面行对准的两幅图像,校正成共面行对准,提高匹配搜索的效率,因为二维搜索变为一维搜索啦!。(共面行对准:两摄像机图像平面在同一平面上,且同一点投影到两个摄像机图像平面时,...
//双目标定无非就是重复两次单目标定的流程,单目标定参考我上一篇博客。 //在学习双目视觉之前,建议大家补充下,双目视觉模型,对极几何的知识,今天只讲源码的流程,以后出一篇对极几何的讲解。...
双目立体视觉标定以及立体匹配参考图片,可用于立体标定,图像校正,立体匹配算法验证
一、立体校正的原因 **原因一:**当畸变系数和内外参数矩阵标定完成后,就应该进行畸变矫正,以达到消除畸变的目的。 **原因二:**在立体成像原理中提到,要通过两幅图像估计物点的深度信息,就必须在两幅图像中准确...
双目测三维体积_实现双目摄像头标定+立体校正+获取深度图+获取点云坐标+测三维重建后的体积_项目源码_优质项目分享

机器视觉学习笔记(8)——基于OpenCV的Bouguet立体校正 双摄像头立体成像(三)-畸变矫正与立体校正人类可以看到3维立体的世界,是因为人的两只眼睛,从不同的方向看世界,两只眼睛中的图像的视差,让我们可以看到3...
三维重建_摄像头标定+双目摄像头立体校正计算点云三维重建体积_优质项目分享
七、立体标定与立体校正 这篇博文中,让玉米和大家一起了解一下,张氏标定是怎样过渡到立体标定的?在这里主要以双目立体视觉进行分析。对于双目立体视觉,我们有两个摄像头。它们就像人的一双眼睛一样,从...
该函数为未校准(几乎对齐)的立体对生成整流单应性。
推荐文章
- php 上传图片 缩略图,PHP 图片上传类 缩略图-程序员宅基地
- scrapy爬虫框架_3.6.1 scrapy 的版本-程序员宅基地
- 微信支付——统一下单——java_小程序统一下单接口-程序员宅基地
- (已解决)报错 ValueError: Tensor conversion requested dtype float32 for Tensor with dtype resource-程序员宅基地
- 记录el-table树形数据,默认展开折叠按钮失效_eltable一刷新展开的子节点展开按钮消失-程序员宅基地
- 设计模式复习-桥接模式_csdn天使也掉毛-程序员宅基地
- CodeForces - 894A-QAQ(思维)_"qaq\" is a word to denote an expression of crying-程序员宅基地
- java毕业生设计移动学习网站计算机源码+系统+mysql+调试部署+lw-程序员宅基地
- 14种神笔记方法,只需选择1招,让你的学习和工作效率提高100倍!_1秒笔记 高级-程序员宅基地
- 最新java毕业论文英文参考文献_计算机毕业论文javaweb英文文献-程序员宅基地