摄像机标定与绝对二次曲线的图像
”计算机视觉中的多视图几何“ 的搜索结果
第3章介绍了透视投影、相机内参、畸变矫正、原像与余像的概念。
Introduction – a Tour of Multiple View Geometry 本章是对主要思想的介绍,...在整个介绍中,我们一般不会给出具体的前几章。 泛射影几何 我们都很熟悉射影变换,当我们看一张图片时,我们看到的不是正方形

《计算机视觉中的多视图几何》是计算机视觉、三维重建的基础,但是由于它涉及的内容较多,英语术语也很多,初学者看起来往往感到吃力,我也是第二次看这本书才搞清楚其中的一些东西。于是整理阅读过程中的一些笔记,...
在之前的文章中,介绍过相机矩阵,这是针对单个相机的,可我们知道单个相机图片并不能告诉我们物体的深度信息,这时至少需要两个相机,这样在两视图间内在的射影几何关系就是对极几何,而基础...
2D 射影平面 直线的齐次表示: 平面上的一条直线的方程ax+by+c=0ax+by+c=0ax+by+c=0可以用矢量(a,b,c)T(a,b,c)T(a,b,c)^T表示。要注意的是对任何非零的k矢量(a,b,c)T(a,b,c)T...
三维计算机视觉坐标系 世界坐标系、2. 相机坐标系 R、t 旋转平移 相机模型 小孔相机成像模型 三维图像就是通过左边的二维图像还原右边所以的未知量。 两视图几何——寻找最小配置解的意义 在计算F和E时为什么要...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达编辑丨机器视觉课堂计算机视觉在智能制造工业检测中发挥着检测识别和定位分析的重要作用,为提高工业检测的检测速率和准确率以及智能自动化程度...




计算机视觉的基本问题是:根据若干幅世界景物的图像求得对真实世界景物结构的理解。 本书解决这个基本问题所采用的技术源于摄影几何和摄影测量学。其与众不同的特色是采用未标定的方法——不需要知道或不必计算摄像...
在多视图几何中,射影映射(projection mapping)是一种非常重要的三维平面到三维平面之间的变换,射影平面IP2IP^2上的点满足一种映射hh,使IP2IP^2上的点x1,x2,x3x_1,x_2,x_3共线时,当且仅当h(x1),h(x2),h(x3)h(x_...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达前言:在计算机视觉方向,数据增强的本质是人为地引入人视觉上的先验知识,可以很好地提升模型的性能,目前基本成为模型的标配。最近几年逐渐出...
现在先介绍点、线和二次曲线之间的一种被称为配极的重要几何关系。 1.极点 一 极线关系 点xx x 和二次曲线CC C 定义一条直线l=Cxl=Cxl= Cx,ll l称为xx x 关于CC C 的极线 ,而点xx x 称为ll l 关于CC C...
计算机视觉——三维视觉 I
标签: 计算机视觉

呕心沥血亲自制作的到包含5级的目录的电子书,配合多视图几何一起看


Tolbox包含大约150个功能,用于图像处理,特征提取,特征变换,特征分析,特征选择,数据选择和生成,分类,聚类,性能评估,多视图分析,图像序列处理以及在几何约束下的跟踪。 Xvis的命令以字母“ X”开头。 例如...
在 3 维空间的射影几何中,与l∞l∞l_{\infty }和虚圆点对应的几何实体是无穷远平面π∞π∞\pi _{\infty }和绝对二次曲线Ω∞Ω∞\Omega _{\infty }。 在 3 维仿射空间中,无穷远平面的标准位置是π∞=...
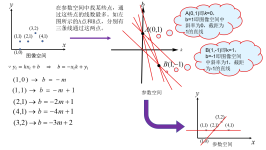
射影矫正的目的是消除平面的透视图像中的射影失真,使得原始平面的相似性质(角度,长度比)可以被测量。 1.由图像恢复仿射性质 结论 1: 在射影变换 HHH 下,无穷远直线l∞l∞l_{\infty }为不动直线的充要...
计算机视觉中,尤其是双视图几何中,基本矩阵F和本质矩阵E扮演着重要角色,今天我们就来简单了解一下它们吧。由于公式比较多,所以直接在word中编辑好后整个截图过来了。(参考书目——《计算机视觉中的多视图几何》...
推荐文章
- Pytorch Dataloader 模块源码分析(二):Sampler / Fetcher 组件及 Dataloader 核心代码-程序员宅基地
- Asp类型判断及数组打印-程序员宅基地
- Adroid Studio 2022.3.1 版本配置greendao提示无法找到_plugin with id 'org.greenrobot.greendao' not found-程序员宅基地
- esxi查看许可过期_解决Vsphere Client 60天过期问题-程序员宅基地
- CMake_cmake_module_path-程序员宅基地
- 生产者消费者模型-程序员宅基地
- Adaptive AUTOSAR 解决方案 INTEWORK-EAS-AP_autosar的eas-程序员宅基地
- 穿山甲SDK错误码40025_穿山甲sdk错误码4025-程序员宅基地
- css firefox下的兼容问题_css 只用于firefox-程序员宅基地
- 【Python】对大数质因数分解的算法问题_python分解多个质因数代码-程序员宅基地