前两天发表的时候没注意,代码出了点错误,所以修改了一下,重新发上来。 参考: ... http://docs.opencv.or
”鱼眼相机标定“ 的搜索结果

对于双目标定而言,opencv一共支持两种模型:普通针孔相机模型和鱼眼相机模型fisheye。后者是opencv3.0后才开始支持的。从使用角度讲,它俩主要差别就在于畸变系数不一样。 双目测距流程一共分为四大步:标定,对齐...
在MATLAB中进行鱼眼相机的标定可以使用Computer Vision Toolbox中的鱼眼相机标定工具。下面是一个简单的步骤指南: 1. 收集鱼眼相机的标定图像。确保图像覆盖整个视场,并且包括不同的深度和角度。 2. 在MATLAB...
摄像头标定–camera_calibration。
最近在搞,uvc鱼眼相机畸变矫正标定、透视图变换为IPM图(鸟瞰图/俯视图),可给恶心坏了,先说说两个畸变矫正的函数吧,如下:fisheye::initUndistortRectifyMap(), (注意我用的是鱼眼相机,你的如果是普通uvc相机...
原文首发于微信公众号——3D视觉工坊:一分钟详解鱼眼镜头标定基本原理及实现 前言 在VSLAM中,经常会使用鱼眼镜头或者广角镜头。本文主要分为理论部分与鱼眼镜头标定实践两部分,其中理论部分,主要参考《A generic...

相机的数学意义:相机标定的意义小孔成像说明必知的专用术语:在双目或多目系统中,世界坐标系和相机坐标系是不重合的,。上图二维平面中,OiO_{i}Oi为图像坐标系原点,OdO_{d}Od是像素坐标系,像素坐标系相对于...
相机标定(Camera calibration)原理、步骤author@jason_ql http://blog.csdn.net/lql0716 在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立...



cv2,Fisheye camera model

广角相机和鱼眼相机其实都属于鱼眼相机的范畴,只是标定时选择的相机模型不一样。作者个人经验,小于180度的相机可以使用OpenCV中相机模型来标定相机,但是如果相机度数大于180度时OpenCV标定出来的效果并不是十分好...
鱼眼相机的标定比针孔相机的标定的原理与方法类似,这里贴上两种自己亲测可用的方案吧。首先是张正友的MATLAB工具箱,下载。从这个超链接可以下载工具箱,也有使用方法的介绍。普通针孔相机的标定过程:Run the main...
使用MATLAB标定工具箱完成相机的的内外参数的获取。


1. 对SLAM中常见的相机模型进行介绍,包括针孔相机模型和鱼眼相机模型 2. 对每种相机模型的畸变模型进行介绍 3. 对VSLAM中常见的几种去畸变方法进行介绍 4. 对常见的几种相机标定方法进行总结

视觉SLAM之相机标定
标签: 数码相机
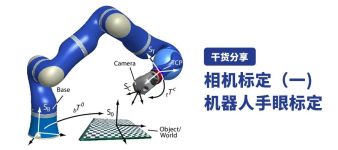
这其中有几个坐标系, 基础坐标系(用 base 表示) 是机器臂的基底坐标系,末端坐标系(用 end 表示) 是机器臂的末端坐标系, 相机坐标系(用 cam 表示) 是固定在机器臂上面的相机自身坐标系,标定物坐标系(用 ...

参考: https://www.mathworks.com/help/vision/ug/fisheye-calibration-basics.html

标定针孔相机的代码为: import cv2 import numpy as np import glob # 设置寻找亚像素角点的参数,采用的停止准则是最大循环次数30和最大误差容限0.001 criteria = (cv2.TERM_CRITERIA_MAX_ITER | cv2.TERM_...
相机标定 matlab
标签: matlab
matlab 相机标定代码 摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。 [1]基本的坐标系: 世界坐标系; 相机坐标系; 成像平面坐标系; 像素坐标系 ...
推荐文章
- c语言链表查找成绩不及格,【查找链表面试题】面试问题:C语言学生成绩… - 看准网...-程序员宅基地
- 计算机网络:20 网络应用需求_应用对网络需求-程序员宅基地
- BEVFusion论文解读-程序员宅基地
- multisim怎么设置晶体管rbe_山东大学 模电实验 实验一:单极放大器 - 图文 --程序员宅基地
- 华为OD机试真题-灰度图恢复-2023年OD统一考试(C卷)-程序员宅基地
- 【机器学习】(周志华--西瓜书) 真正例率(TPR)、假正例率(FPR)与查准率(P)、查全率(R)_真正例率和假正例率,查准率,查全率,概念,区别,联系-程序员宅基地
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地