
”ROS“ 的搜索结果


(一)ros::ok() 用于检查系统状态,适用于Publisher程序无限循环 语法: while(ros::ok()) { //... } ros::ok()在以下几种情况下会返回false: 1、按下Ctrl-C时。 2、我们被一个同名同姓的节点从网络中踢出。 3、...

M1芯片安装ROS

Rosbag play系列指令 Rosbag play bagFile01.bag bagFile02.bag … 播放多个录制文件: 由于我们的bag录制文件并不是同一时间录制,因此bag录制文件会因录制顺序不同播放顺序也不同,同时两个录制文件播放的...
ROS2和ROS常用命令的异同
文章目录引言ROS系列文章ROS 消息文件自定义消息添加源码文件添加依赖修改编译规则尝试编译查看生成的消息源码文件使用自定义的消息关于ros::Time例程源码运行效果参考 引言 这篇文章讲解我们自己按需定义消息。 ROS...
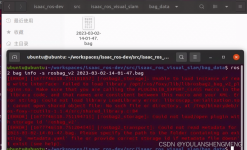

ROS中rosbag命令常用方法 bag包修复 .bag.active文件修复
参考见b站赵虚左老师Ros入门课程视频p54在功能包内创建文件夹msg,并在文件夹内创建如图所示文件(坐标信息都是int类型的)配置package.mal文件配置CMakelist文件配置完后编译所有文件,在devel文件夹下会生成两种...


ROS ros::spin()与ros::spinonce() 一、定义介绍 ros::spin()与ros::spinonce(),都是ROS消息回调处理函数。这两个函数需要结合ros::Subscriber()(ROS消息订阅函数)来看。消息回调处理的意思是调用回调函数...
ros2 launch 的用法以及基础功能的示例
Ubuntu18.04安装ROS
标签: 机器人
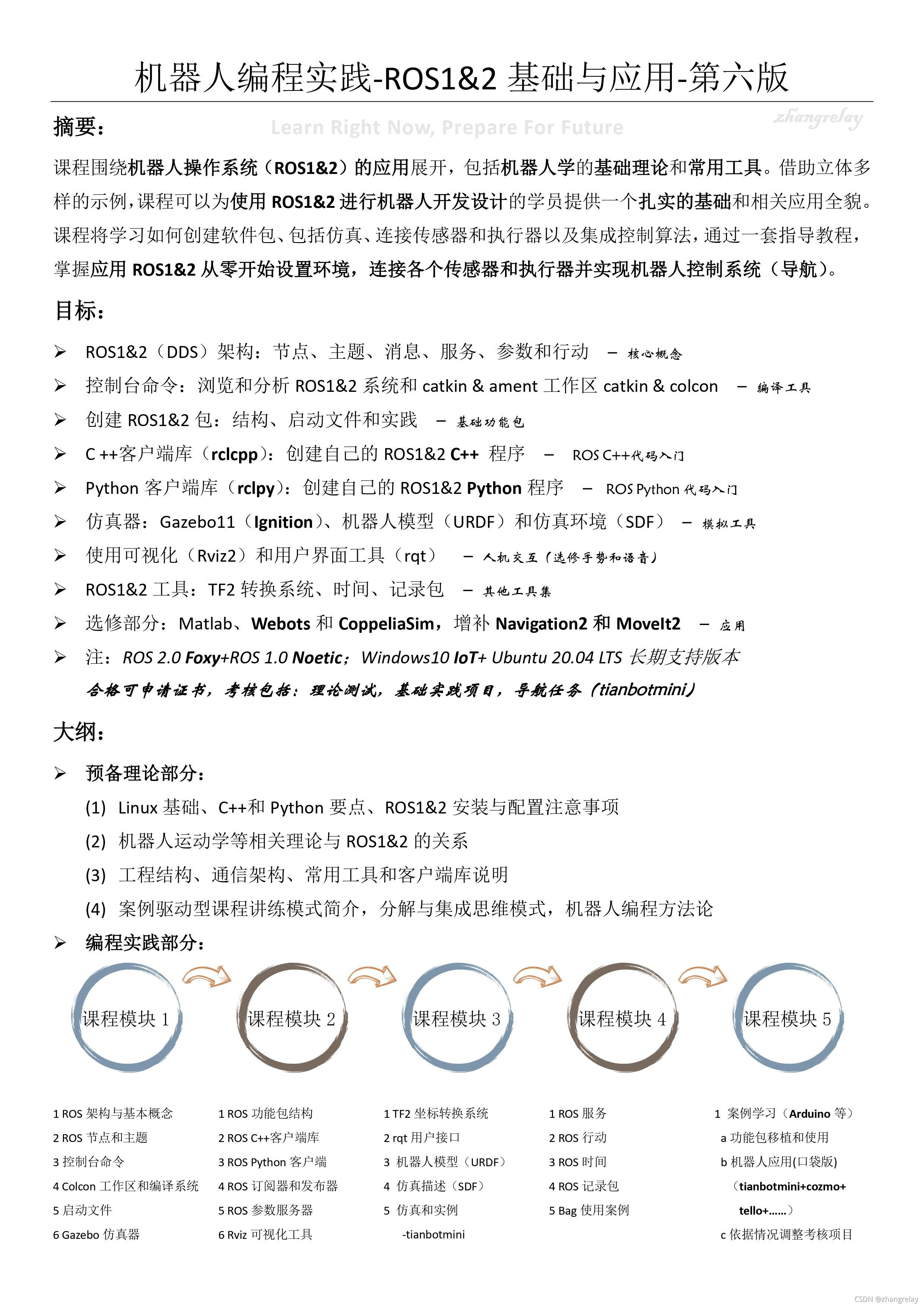
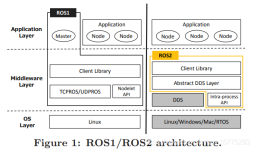
ROS官方文档

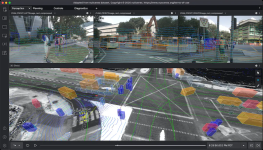
在ROS和Gazebo中,获取机器人的位置信息通常通过ROS消息传递进行。在这篇文章中,我们将介绍三种获取机器人在Gazebo中位置真值的方法:使用ROS tf库、使用自己编写Gazebo Model Plugin以及libgazebo_ros_p3d Plugin...
需求:要将ros2录制的db3文件,转为ros1的bag文件。太长不开,直接看方案3。
推荐文章
- 记录CentOS7 Linux下安装MySQL8_适合正式环境_干货满满(超详细,默认开启了开机自启动,设置表名忽略大小写,提供详细配置,创建非root专属远程连接用户)_centos7安装mysql8-程序员宅基地
- python 读取grib \grib2-程序员宅基地
- Kimi Chat,不仅仅是聊天!深度剖析Kimi Chat 5大使用场景!-程序员宅基地
- Datawhale-集成学习-学习笔记Day4-Adaboost-程序员宅基地
- TexStudio配置以及解决无法Build&View_texstudio 无法启动 build & view:pdflatex:"d:/data/texl-程序员宅基地
- 用户空间访问I2C设备驱动-程序员宅基地
- 人脸识别算法初次了解-程序员宅基地
- maven的pom文件学习-程序员宅基地
- wamp mysql 没有启动,WAMP中mysql服务突然无法启动 解决方法-程序员宅基地
- 《树莓派Python编程入门与实战(第2版)》——3.7 创建Python脚本-程序员宅基地